PPK(后处理动态)是一种 GNSS 数据处理方法,通过校正原始定位数据中的误差来实现高精度定位。后处理广泛应用于需要精确地理空间信息的应用中,例如测量、测绘和无人机操作。
SBG Systems 开发了一种内部 GNSS 后处理解决方案,以增强其惯性导航系统的性能。
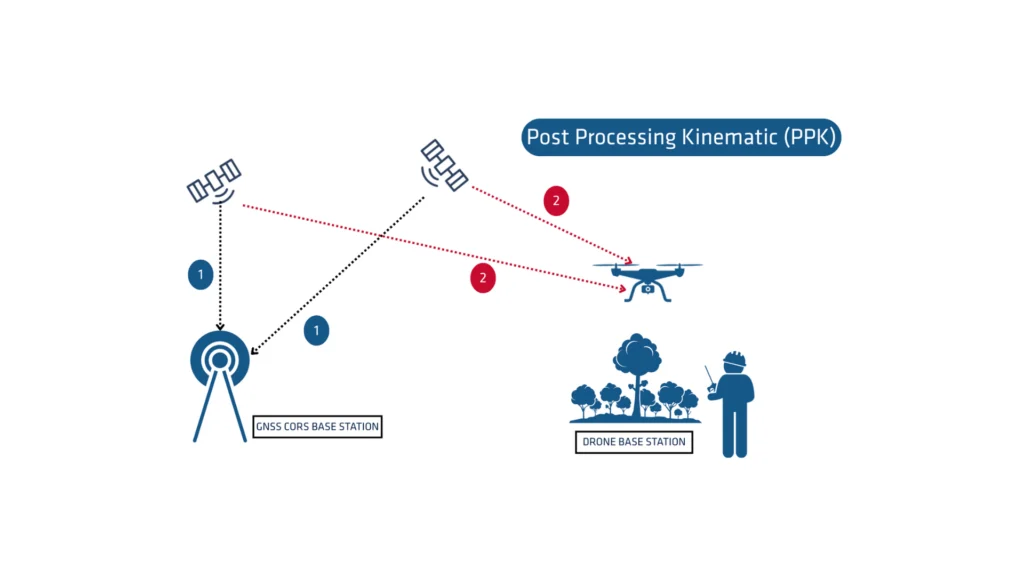
什么是 GNSS 后处理?
PPK 后处理是一种方法,系统在此方法中处理数据采集后记录在 GNSS 接收器上的原始 GNSS 数据测量值。您可以将这些测量值与其他 GNSS 测量源结合,为 GNSS 接收器提供最完整、最精确的运动轨迹,即使在最具挑战性的环境中也是如此。
这些其他来源可以是数据采集项目现场或附近的本地 GNSS 基站,也可以是通常由政府机构和/或商业 CORS 网络提供商提供的现有连续运行参考站 (CORS)。
后处理动态 (PPK) 软件可以利用免费的 GNSS 卫星轨道和时钟信息,以帮助进一步提高精度。PPK 允许精确确定本地 GNSS 基站在其所使用的绝对全球坐标参考框架基准中的位置。
PPK 软件还可以支持不同坐标参考框架之间的复杂转换,以支持工程项目。
换句话说,它提供了校正功能,提高了项目的精度,甚至可以在任务后的测量或安装过程中修复数据丢失或错误。
RTK vs PPK
实时动态 (RTK) 是一种定位技术,它以近乎实时的方式传输 GNSS 校正信息,通常使用 RTCM 格式的校正流。但是,在确保 GNSS 校正的完整性、可用性、覆盖范围和兼容性方面可能存在挑战。
PPK 的主要优势在于优化后处理期间的数据处理活动,包括正向和反向处理。相比之下,实时处理可能会受到校正及其传输的中断或不兼容的影响,从而导致较低的定位精度。
与实时 (RTK) 相比,GNSS PPK 后处理的第一个主要优势是,现场使用的系统不需要数据链/无线电即可将来自 CORS 的 RTCM 校正信息馈送到 INS/GNSS 系统中。
采用后处理的主要限制是最终应用程序需要对环境做出反应。另一方面,如果您的应用程序可以承受生成优化轨迹所需的额外处理时间,它将大大提高所有交付的数据质量。
正向和反向处理如何提高数据精度?
假设我们在测量过程中有 60 秒的 GNSS 信号中断。正向处理中的位置误差快速增长(速率取决于 IMU 规格和其他参数),并在中断结束时达到最大值。然后它会迅速恢复。
在后处理中,我们假设时间倒流,并以与物理方程式保持有效性的反时间顺序进行处理。在这种反向处理中,误差将在 GNSS 中断的实际开始时达到最大值,与自然正向处理非常对称。
将这两个计算结果合并后,在中断中间会产生最大误差,其幅度远低于仅正向或仅反向的解决方案。这将特别改善 SBG Systems 产品所允许的 GNSS+INS 解决方案,但仅 GNSS 处理也将从此工作流程中受益。
如前所述,后处理是实现此改进的唯一方法,因为您需要从头到尾的所有数据,这会延迟其使用,直到测量结束。
适用于所有测量应用
RTK 广泛用于需要实时结果的测绘、施工控制和海洋应用中的高精度 GNSS 定位。INS 数据的后处理有利于 UAV 和 USV 应用,在这些应用中,无线电实施和 RTCM 校正流监控具有挑战性。
机载测量员倾向于使用 PPK,因为到飞机的datalink很难实现,而且由于地面广播天线的方向,蜂窝网络在高空工作效果不佳。
其他需要后处理动态的应用包括在后续工作流程(通常在云端)中处理数据(例如,图像或 LiDAR 数据)的应用,并且可以轻松添加使用 GNSS 后处理软件(如 Qinertia)处理轨迹的过程。
