PPK (Post-Processing Kinematic) to metoda przetwarzania danych GNSS, która osiąga wysoką dokładność pozycjonowania poprzez korygowanie błędów w surowych danych pozycyjnych. Post-processing jest szeroko stosowany w aplikacjach wymagających precyzyjnych informacji geoprzestrzennych, takich jak geodezja, kartografia i operacje UAV.
SBG Systems opracowało własne rozwiązanie GNSS Post-Processing w celu poprawy wydajności swoich inercyjnych systemów nawigacyjnych.
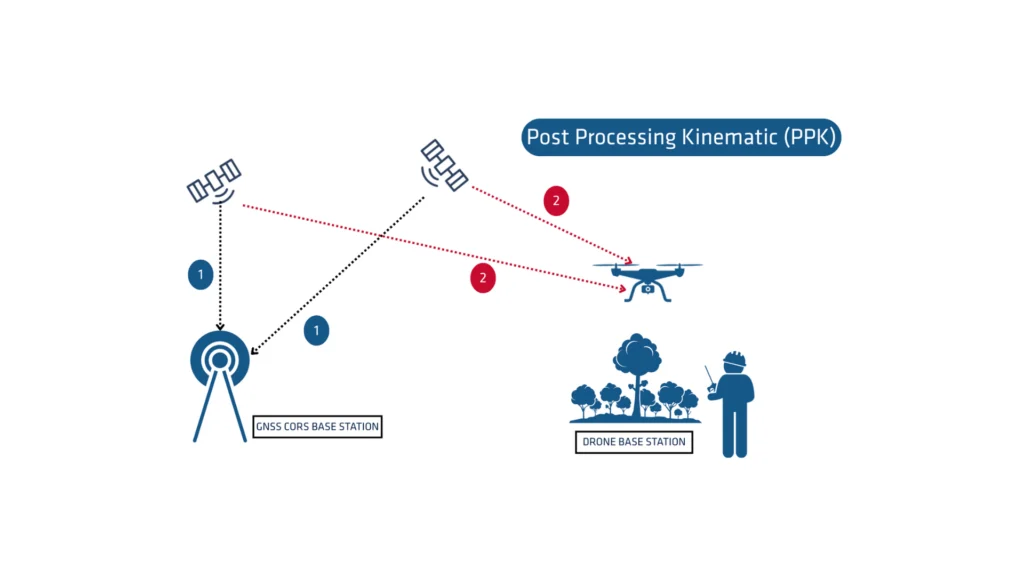
Co to jest post-processing GNSS?
Przetwarzanie końcowe PPK to podejście, w którym system przetwarza surowe dane pomiarowe GNSS zarejestrowane przez odbiornik GNSS po akwizycji danych. Można je połączyć z innymi źródłami pomiarów GNSS, aby zapewnić najbardziej kompletną i dokładną trajektorię kinematyczną dla odbiornika GNSS, nawet w najbardziej wymagających środowiskach.
Te inne źródła mogą obejmować lokalną stację bazową GNSS w miejscu lub w pobliżu projektu akwizycji danych, lub istniejące stacje referencyjne CORS (Continuously Operating Reference Stations) zazwyczaj oferowane przez agencje rządowe i/lub komercyjnych dostawców sieci CORS.
Oprogramowanie do kinematycznego przetwarzania końcowego (PPK) może wykorzystywać swobodnie dostępne informacje o orbitach satelitów GNSS i korekcjach zegarów, aby dodatkowo poprawić dokładność. PPK umożliwia precyzyjne określenie lokalizacji stacji bazowej GNSS w absolutnym globalnym układzie odniesienia współrzędnych, którego używa.
Oprogramowanie PPK może również wspierać złożone transformacje między różnymi układami odniesienia współrzędnych w ramach projektów inżynierskich.
Innymi słowy, zapewnia dostęp do korekt, zwiększa dokładność projektu i może nawet naprawić utraty danych lub błędy podczas pomiarów lub instalacji po zakończeniu misji.
RTK kontra PPK
Real-Time Kinematic (RTK) to technika pozycjonowania, która przesyła poprawki GNSS w czasie zbliżonym do rzeczywistego, zazwyczaj przy użyciu strumienia poprawek w formacie RTCM. Mogą jednak wystąpić trudności w zapewnieniu poprawności poprawek GNSS, w szczególności ich kompletności, dostępności, zasięgu i kompatybilności.
PPK oferuje znaczącą zaletę optymalizacji przetwarzania danych podczas postprocessingu, w tym przetwarzania w przód i w tył. Natomiast przetwarzanie w czasie rzeczywistym może być zakłócone lub wystąpić niezgodności w poprawkach i ich transmisji, co prowadzi do niższej dokładności pozycjonowania.
Pierwszą kluczową zaletą postprocessingu GNSS PPK w porównaniu z czasem rzeczywistym (RTK) jest to, że system używany w terenie nie musi posiadać łącza danych/radia do przesyłania poprawek RTCM pochodzących z CORS do systemu INS/GNSS.
Głównym ograniczeniem we wdrożeniu postprocessingu jest wymóg działania aplikacji końcowej w danym środowisku. Z drugiej strony, jeśli Twoja aplikacja może wytrzymać dodatkowy czas przetwarzania potrzebny do wygenerowania zoptymalizowanej trajektorii, znacznie poprawi to jakość danych dla wszystkich Twoich produktów.
W jaki sposób przetwarzanie do przodu i do tyłu poprawia dokładność danych?
Wyobraźmy sobie, że mamy 60-sekundową przerwę w sygnale GNSS w środku naszego pomiaru. Błąd pozycji w przetwarzaniu do przodu szybko rośnie (tempo zależy od specyfikacji IMU i innych parametrów) i osiąga maksimum na końcu przerwy. Następnie szybko się koryguje.
W post-processingu zakładamy, że czas płynie wstecz i przetwarzamy dane w kolejności antychronologicznej, ponieważ równania fizyczne pozostają ważne. W tym przetwarzaniu wstecznym błąd byłby maksymalny na rzeczywistym początku przerwy w sygnale GNSS, w sposób bardzo symetryczny do naturalnego przetwarzania do przodu.
Połączenie tych dwóch wyników obliczeń daje maksymalny błąd w okolicach środka przerwy w dostawie sygnału, o znacznie mniejszej wartości niż w przypadku rozwiązań wykorzystujących tylko dane z przodu lub tylko z tyłu. Poprawi to szczególnie rozwiązania GNSS+INS oferowane przez SBG Systems, ale przetwarzanie danych tylko z GNSS również skorzysta z tego procesu.
Jak wspomniano wcześniej, post-processing jest jedynym sposobem na osiągnięcie tej poprawy, ponieważ potrzebne są wszystkie dane od początku do końca, co opóźnia jego użycie do końca pomiaru.
Dostępna dla wszystkich aplikacji pomiarowych
RTK jest powszechnie stosowany do precyzyjnego pozycjonowania GNSS w kartografii, kontroli budowlanej i zastosowaniach morskich wymagających wyników w czasie rzeczywistym. Post-processing danych INS jest korzystny w zastosowaniach UAV i USV, gdzie implementacja radia i monitorowanie strumienia korekcji RTCM są trudne.
Specjaliści zajmujący się pomiarami lotniczymi zwykle używają PPK, ponieważ łącza danych do samolotów są trudne do zrealizowania, a sieć komórkowa działa słabo na wysokości z powodu orientacji naziemnych anten nadawczych.
Inne zastosowania wymagające post-processingu kinematycznego to te, w których dane (np. dane obrazowe lub LiDAR) są przetwarzane w kolejnym etapie, często w chmurze, i gdzie można łatwo dodać przetwarzanie trajektorii za pomocą oprogramowania do post-processingu GNSS, takiego jak Qinertia.
