PPK (Post-Processing Kinematic) è un metodo di elaborazione dei dati GNSS che consente di ottenere un posizionamento ad alta precisione correggendo gli errori nei dati di posizionamento grezzi. Il post-processing è ampiamente utilizzato in applicazioni che richiedono informazioni geospaziali precise, come il rilevamento, la mappatura e le operazioni UAV.
SBG Systems ha sviluppato una soluzione interna di post-processing GNSS per migliorare le prestazioni dei suoi sistemi di navigazione inerziale.
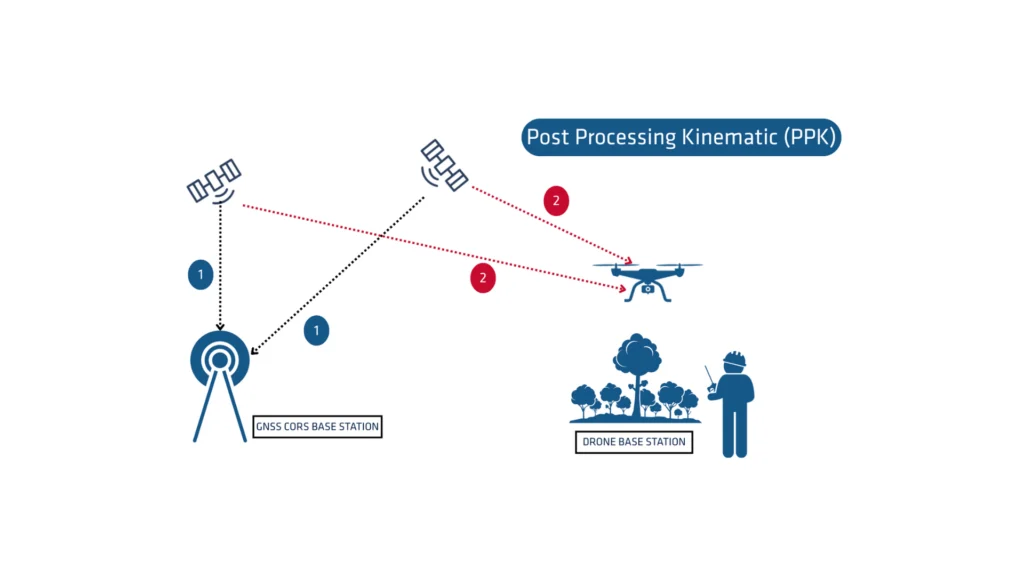
Cos'è il post-processing GNSS?
Il post-processing PPK è un approccio in cui il sistema elabora le misurazioni grezze dei dati GNSS registrate su un ricevitore GNSS dopo l'acquisizione dei dati. È possibile combinarle con altre fonti di misurazioni GNSS per fornire la traiettoria cinematica più completa e accurata per il ricevitore GNSS, anche negli ambienti più difficili.
Queste altre fonti possono essere stazioni base GNSS locali presso o vicino al progetto di acquisizione dati, o stazioni di riferimento a funzionamento continuo (CORS) esistenti, tipicamente offerte da agenzie governative e/o fornitori di reti CORS commerciali.
Un software Post-processing Kinematic (PPK) può utilizzare le informazioni sull'orbita e sull'orologio dei satelliti GNSS disponibili gratuitamente, per contribuire a migliorare ulteriormente la precisione. Il PPK consente la determinazione precisa della posizione di una stazione base GNSS locale in un datum di riferimento di coordinate globali assolute, che esso utilizza.
Il software PPK può anche supportare trasformazioni complesse tra diversi sistemi di riferimento di coordinate a supporto di progetti di ingegneria.
In altre parole, esso fornisce accesso a correzioni, migliora la precisione del progetto e può persino riparare perdite o errori di dati durante il rilievo o l'installazione dopo la missione.
RTK e PPK a confronto
Il Real-Time Kinematic (RTK) è una tecnica di posizionamento che trasmette correzioni GNSS quasi in tempo reale, tipicamente utilizzando un flusso di correzioni in formato RTCM. Tuttavia, possono esserci sfide nel garantire le correzioni GNSS, in particolare la loro completezza, disponibilità, copertura e compatibilità.
Il PPK offre il vantaggio principale di ottimizzare le attività di elaborazione dei dati durante la post-elaborazione, inclusa l'elaborazione in avanti e all'indietro. Al contrario, l'elaborazione in tempo reale può soffrire di interruzioni o incompatibilità nelle correzioni e nella loro trasmissione, portando a un posizionamento di minore precisione.
Un primo vantaggio chiave della post-elaborazione GNSS PPK rispetto al tempo reale (RTK) è che il sistema utilizzato sul campo non necessita di un datalink/radio per alimentare le correzioni RTCM provenienti dal CORS nel sistema INS/GNSS.
La principale limitazione all'adozione della post-elaborazione è il requisito che l'applicazione finale agisca sull'ambiente. D'altra parte, se la vostra applicazione può sopportare il tempo di elaborazione aggiuntivo necessario per produrre una traiettoria ottimizzata, migliorerà notevolmente la qualità dei dati per tutti i vostri risultati.
In che modo l'elaborazione forward e backward migliora l'accuratezza dei dati?
Immaginiamo di avere un'interruzione GNSS di 60 secondi nel bel mezzo del nostro rilievo. L'errore di posizione nell'elaborazione in avanti cresce rapidamente (la velocità dipende dalle specifiche dell'IMU e da altri parametri) e raggiunge il suo massimo alla fine dell'interruzione. Quindi si riprende rapidamente.
Nel post-processing, fingiamo che il tempo scorra all'indietro ed eseguiamo l'elaborazione in ordine anti-cronologico poiché le equazioni fisiche rimangono valide. In questa elaborazione all'indietro, l'errore sarebbe massimo all'inizio effettivo dell'interruzione GNSS in modo molto simmetrico rispetto alla naturale elaborazione in avanti.
La fusione di questi due risultati di calcolo comporta un errore massimo intorno alla metà dell'interruzione, con una magnitudine molto inferiore rispetto alle soluzioni solo in avanti o solo all'indietro. Ciò migliorerà in particolare le soluzioni GNSS+INS, come consentito dai prodotti SBG Systems, ma anche l'elaborazione solo GNSS trarrà vantaggio da questo flusso di lavoro.
Come affermato in precedenza, il post-processing è l'unico modo per ottenere questo miglioramento, poiché sono necessari tutti i dati dall'inizio alla fine, il che ne ritarda l'utilizzo fino alla fine del rilievo.
Accessibile a tutte le applicazioni di rilevamento
L'RTK è ampiamente utilizzato per il posizionamento GNSS ad alta precisione in applicazioni di mappatura, controllo delle costruzioni e marine che richiedono risultati in tempo reale. La post-elaborazione dei dati INS è vantaggiosa per le applicazioni UAV e USV dove l'implementazione radio e il monitoraggio del flusso di correzione RTCM sono complessi.
I topografi aerei tendono a utilizzare il PPK, poiché i collegamenti dati con gli aeroplani sono difficili da realizzare, dato che le reti cellulari funzionano male in quota a causa dell'orientamento delle antenne di trasmissione a terra.
Altre applicazioni che necessitano di Post-processing Kinematic sono quelle in cui i dati (ad esempio, immagini o dati LiDAR) vengono elaborati in un flusso di lavoro successivo, spesso nel cloud, e dove l'elaborazione della traiettoria con un software di post-elaborazione GNSS come Qinertia può essere facilmente aggiunta.
