
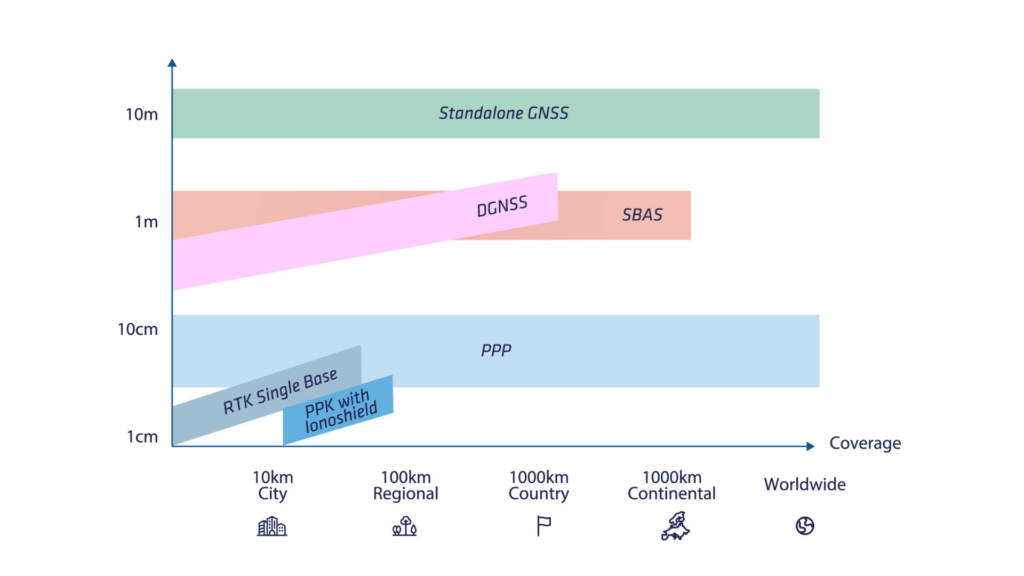
En un escenario cotidiano, la precisión del Sistema Mundial de Navegación por Satélite (GNSS) autónomo es más que suficiente para ayudar a alguien a orientarse, pero muchas aplicaciones requieren una mayor precisión. Se han desarrollado muchas tecnologías de correcciones diferenciales para mejorar la precisión del GNSS hasta 1 cm, lo que permite una amplia gama de nuevas aplicaciones.
Lograr tal precisión requiere prestar atención al marco de referencia utilizado para los cálculos y los resultados de posicionamiento, un tema que se trata en Geodesia y Transformaciones Datum, que está fuera del alcance de este artículo.
Correcciones GNSS
Mejorar la precisión del GNSS se basa en la corrección de varios errores.
Existen muchos tipos de correcciones que proporcionan diferentes niveles de cobertura y rendimiento.
Los principales se detallan en la tabla siguiente. En este artículo, cubriremos los conceptos básicos de las correcciones más comunes: una breve explicación de DGNSS, seguida de explicaciones en profundidad de SBAS y RTK; y describiremos los beneficios de PPK.
El siguiente artículo de esta serie analizará Ionoshield y PPP con más detalle.
GNSS diferencial (DGNSS)
El DGNSS tradicional basado en código hace una suposición simple: se asume que los errores de los satélites y los errores atmosféricos locales son los mismos en áreas pequeñas. Un par de receptores GPS pueden entonces ser usados para cancelar tanto los errores atmosféricos (ionosféricos y troposféricos) como los errores de los satélites, mejorando así el rendimiento de la navegación.
En este modo de operación, una estación base con receptor GNSS se instala a pocos kilómetros del rango de operación del receptor GNSS del móvil. La estación base transmite un conjunto de correcciones al receptor móvil utilizando un módem RF o GSM. El receptor móvil puede entonces usar estas correcciones para calcular una posición diferencial (relativa a la estación base).
Esta técnica puede mejorar la precisión de la navegación a nivel sub-métrico, pero ahora es obsoleta ya que el RTK se ha convertido en el estándar para el posicionamiento de alta precisión.
SBAS (Sistema de Aumentación Basado en Satélites)
SBAS se desarrolló para permitir la navegación segura de aviones civiles. Desde entonces, se ha utilizado para muchas otras aplicaciones de usuario final que requieren mayor precisión que un receptor GNSS autónomo.
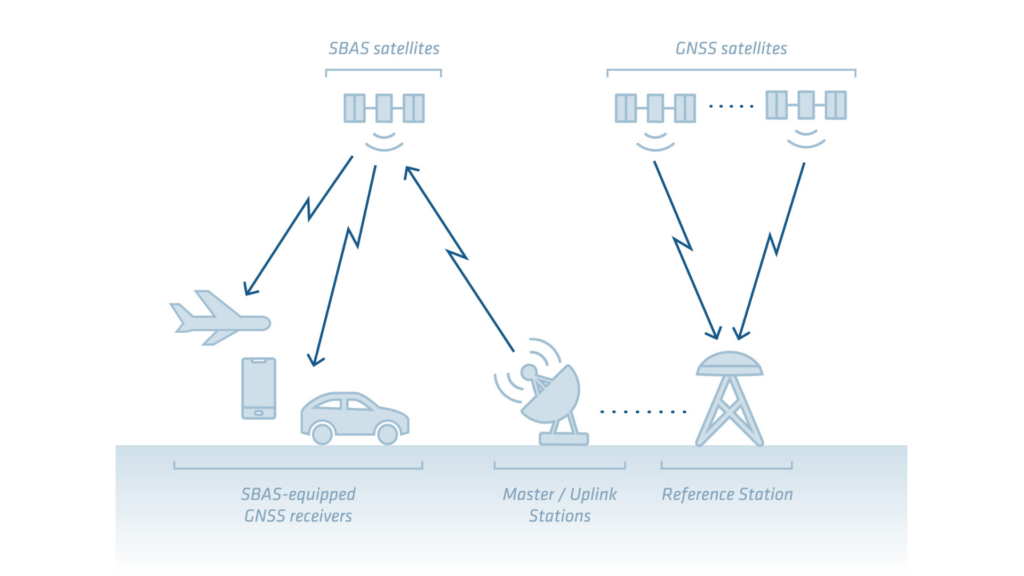
El concepto de SBAS es utilizar una red de estaciones de referencia para calcular correcciones que puedan mejorar el rendimiento del GPS en un área amplia (cobertura continental).
Estas correcciones se transmiten luego por satélites geoestacionarios SBAS dedicados. Los receptores GNSS modernos pueden rastrear estas correcciones directamente a través de su antena GNSS regular y utilizarlas en su motor de posicionamiento, como, SBAS que ofrece una precisión de 1 metro.
El principal objetivo de todas las constelaciones SBAS no es lograr la máxima precisión, sino permitir que el GNSS alcance una precisión mínima para la aplicación prevista (navegación y aterrizaje de aeronaves) con un concepto añadido de integridad (medición precisa del error de posición).
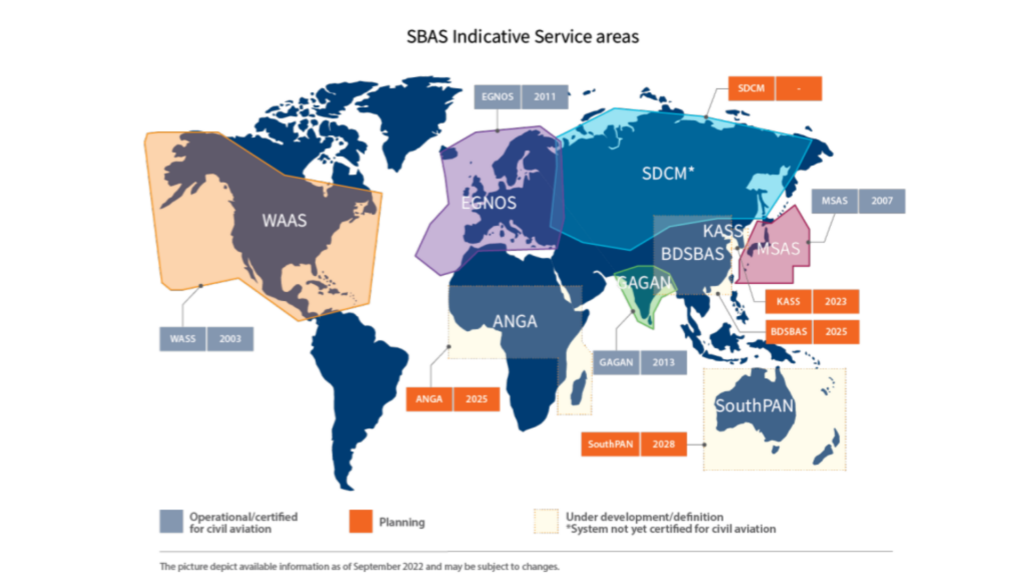
Los SBAS actualmente en uso incluyen:
- WAAS para los países de América del Norte
- EGNOS para Europa
- GAGAN para India
- MSAS para Japón
Sin embargo, la mayoría de los SBAS actuales sólo proporcionan correcciones para la constelación GPS, lo que los hace subóptimos para la navegación terrestre. Las futuras soluciones SBAS (por ejemplo, EGNOS V2) proporcionarán correcciones multi-constelación.
Tecnología detrás de SBAS
Las diversas soluciones SBAS utilizan la misma tecnología subyacente para proporcionar correcciones. Proporcionan correcciones para:
- Errores del reloj del satélite
- Desviaciones de la órbita del satélite
- Errores atmosféricos
SBAS también proporciona información sobre la integridad de los satélites, que puede utilizarse para rechazar datos de satélites que funcionan mal.
Las correcciones atmosféricas también se calculan utilizando la red de estaciones base para proporcionar un patrón de los errores atmosféricos. El valor del error transferido corresponde al retardo vertical introducido por la atmósfera en puntos dados llamados IGP (Puntos de la Rejilla Ionosférica). El receptor puede entonces corregir el retardo de las diferentes señales de cada satélite.
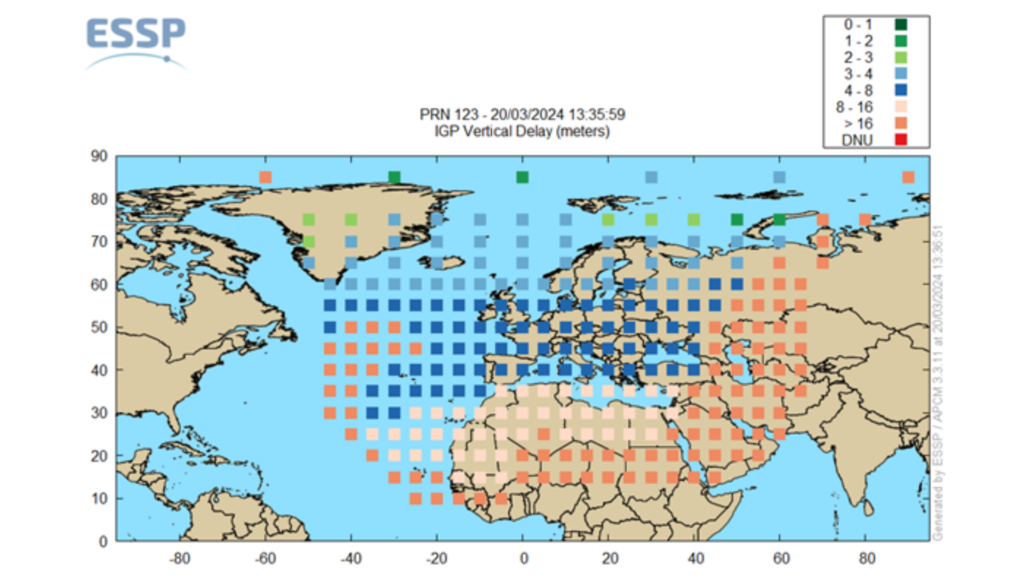
Utilizando la información proporcionada por SBAS, el receptor puede corregir los errores en la medición basada en pseudodistancias, mejorando la precisión de la posición a aproximadamente 1,2 m RMS horizontal y 1,6 m RMS vertical. Esta es una mejora significativa con respecto al GNSS autónomo, especialmente para el componente vertical.
Cinemática en Tiempo Real (RTK) y Cinemática Post-Procesada (PPK)
La tecnología RTK se introdujo por primera vez para aplicaciones de topografía a mediados de la década de 1990. Al igual que el tradicional Sistema de Posicionamiento Global Diferencial (DGPS), el RTK se basa en una estación base situada con precisión y en receptores GNSS móviles (rovers).
Dos pasos clave de cálculo permiten un posicionamiento preciso a nivel centimétrico:
- Doble diferencia
- Medición de fase portadora y fijación de ambigüedades
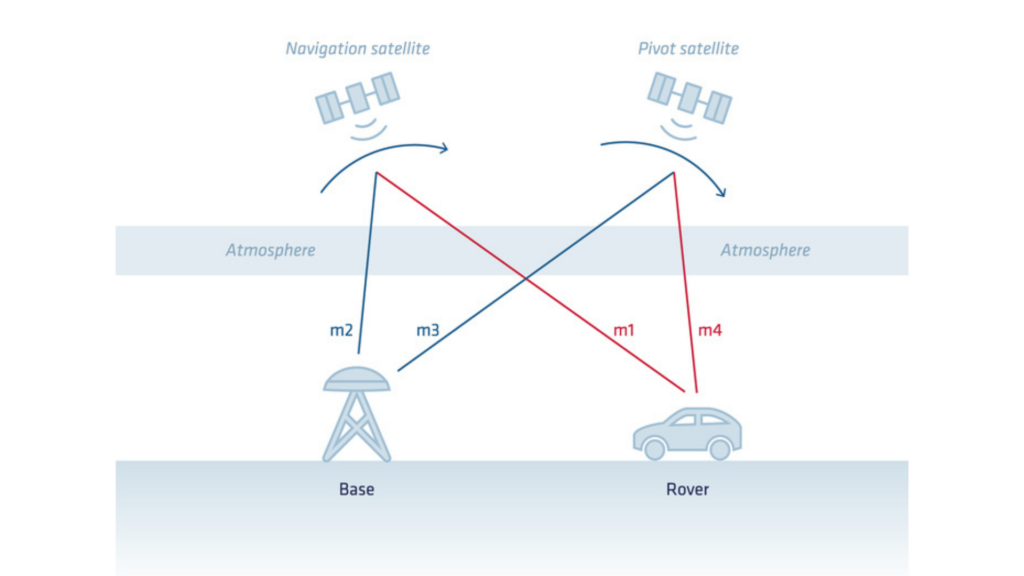
Doble diferencia
El DGPS generalmente utiliza solo mediciones de código y diferencia simple.
Por otro lado, el RTK añade mediciones de fase y utiliza un enfoque de “doble diferencia”. En este método, las mediciones de la base se restan de las mediciones del móvil, y todas las mediciones del satélite de navegación se restan de un satélite pivote.
Este enfoque puede compensar todos los errores inducidos por el satélite, los errores inducidos por el receptor, así como los errores atmosféricos que se supone que son constantes en las proximidades de la estación base.
A partir de este cálculo obtenemos:
- La posición del móvil (latitud/longitud/altitud) en el datum de la estación base
- La hora del móvil
La distancia entre la estación base y el móvil se denomina línea de base y es un factor clave en RTK. A medida que aumenta la línea de base, el presupuesto de error aumenta marginalmente porque los errores atmosféricos comunes y los errores comunes de la órbita del satélite no se cancelan por completo. Este es el típico “+1ppm” que se observa en las especificaciones de precisión de la posición RTK.
Medición de fase portadora y fijación de ambigüedades
La medición de la fase portadora, introducida en nuestro artículo anterior, es necesaria para reducir los errores al nivel centimétrico.
El reto de las mediciones de la fase portadora es que son inherentemente ambiguas (o incompletas). Falta un número entero de ciclos de fase portadora en la medición. Esta parte que falta también se conoce como “ambigüedad”.
El proceso de posicionamiento cinemático en tiempo real (RTK) comienza estimando estas ambigüedades. Este proceso también se conoce como el modo “RTK Float”. En este modo, las ambigüedades convergen lentamente pero no son valores enteros. Esto permite al receptor suavizar la posición y lograr una precisión de aproximadamente nivel decímetro.
Para lograr la máxima precisión y robustez, el siguiente paso es identificar el valor entero para cada una de estas ambigüedades en tiempo real. Este proceso se denomina resolución de la ambigüedad entera.
El resultado de la resolución de la ambigüedad maximiza la precisión RTK y proporciona una mayor robustez. Esto se conoce comúnmente como modo “RTK Fixed”.
Si se interrumpe el seguimiento de la fase a un satélite en particular, se produce un evento de “salto de ciclo” y la ambigüedad entera para ese satélite debe resolverse de nuevo. Por esta razón, demasiados saltos de ciclo (y especialmente los saltos de ciclo en todos los satélites al mismo tiempo) tienen un efecto negativo en el rendimiento RTK. Una buena antena y la colocación de la antena y un entorno de RF limpio son esenciales para limitar estos eventos.
Post-processing Kinematics
Como hemos visto, RTK es la aplicación de estas correcciones “en tiempo real”, lo que significa que el rover debe tener una conexión de enlace de datos con la estación base para poder calcular el procesamiento RTK sobre el terreno.
Algunas aplicaciones no necesitan la trayectoria en tiempo real, pero podrían beneficiarse de una mayor precisión o de una configuración más sencilla. La cinemática de postprocesamiento (PPK) puede satisfacer esas necesidades. Con PPK, el rover recoge sus propios datos GNSS brutos durante la recogida de datos sin recibir correcciones en tiempo real. Más tarde, estos datos se post-procesan utilizando información precisa de una estación base o de una red de estaciones de referencia.
PPK permite una mayor flexibilidad en la recopilación de datos, ya que no depende de las correcciones en tiempo real. Se utiliza a menudo en escenarios en los que la comunicación en tiempo real es difícil o innecesaria, como la cartografía aérea, el levantamiento topográfico con drones o la investigación científica.
Ventajas de usar PPK para correcciones diferenciales.
PPK ofrece las siguientes ventajas clave al procesar GNSS:
- Flujo de trabajo de campo mejorado: Un costo importante de una misión basada en RTK es asegurarse de que haya una estación base cerca, configurar una estación base si es necesario, asegurar una conexión de datos fiable, etc. Qinertia tiene un gran número de redes CORS integradas; y acceso directo a redes de terceros. Esto elimina la complejidad de asegurar la disponibilidad de una base y configurar una conexión de datos fiable.
- Control de calidad mejorado: Muchos indicadores de calidad ayudan a evaluar el rendimiento real de un procesamiento. Estos incluyen estadísticas avanzadas, separación (diferencia entre la posición/actitud calculada durante el procesamiento hacia adelante y hacia atrás), así como indicadores de señales GNSS.
- Rendimiento general mejorado: la resolución de ambigüedades RTK puede llevar algún tiempo (desde unos segundos hasta unos minutos, dependiendo de la distancia a la estación base y de las condiciones atmosféricas). Esto puede ser significativo al inicio de una adquisición o en condiciones GNSS difíciles. El PPK mitiga estos efectos procesando en ambas direcciones, hacia adelante y hacia atrás, para maximizar la tasa de fijación. El rendimiento también puede mejorarse utilizando algoritmos más avanzados o utilizando efemérides de satélite precisas.