Batimetría basada en USV
Ekinox-D, el INS perfecto para batimetría basada en USV.
"Buscábamos un sistema de navegación inercial compacto, preciso y rentable. El Ekinox-D era la solución perfecta". | David M., Director General de ITER Systems

Ekinox-D, el INS perfecto para batimetría basada en USV
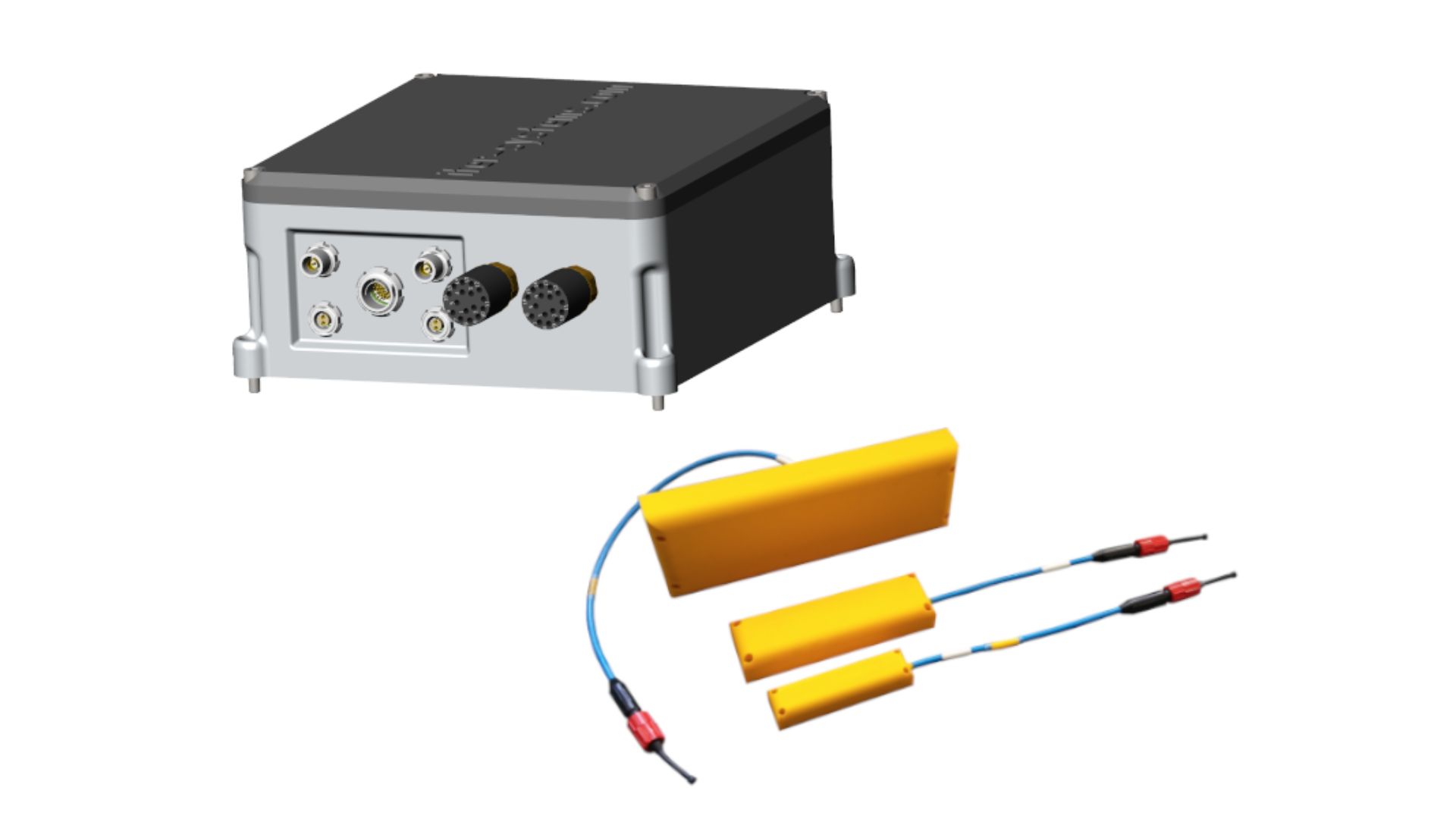
Like most unmanned systems, USVs have space and power constraints. Ekinox-D is the best INS to be integrated into this type of vehicle. Weighing less than 600 grams and low power (<7W), the Ekinox-D INS integrates an RTK dual antenna GNSS receiver for a centimeter-level position.
It provides a 0.05° attitude while delivering a 5 cm real-time heave that automatically adjusts to the wave period.
USV con sonar batimétrico de barrido
SPYBOAT® Swan es un vehículo de superficie no tripulado (USV) totalmente equipado para operaciones hidrográficas en aguas poco profundas. Lo controla a distancia un operador que permanece en tierra, a una distancia de hasta un kilómetro del USV.
Swan realiza levantamientos batimétricos en zonas en las que los buques no pueden navegar, como cauces fluviales, lagos, embalses, presas o puertos.
Equipado con un Bathyswath 2, un sonar batimétrico de barrido, el USV proporciona información batimétrica y de navegación en tiempo real al tablet PC del operador. Swan es compatible con todo el software hidrográfico.
"Ekinox-D perfect fit to Survey-based USV operating in shallow waters". | Sistemas ITER
USV con ecosonda multihaz
El Z-Boat de Oceanscience está diseñado pensando en el topógrafo.
La forma del casco, la propulsión, la comunicación por radio y la instrumentación de sonar bajo demanda se combinan para ofrecer una opción fácil de usar y potente para el topógrafo hidrográfico o el topógrafo terrestre que desee completar trabajos hidrográficos costeros.
La integración personalizada para la Universidad de Washington Tacoma entregada en mayo de 2016 incluía el Rugged Z-Boat 1800RP, el sistema de navegación inercial Ekinox-D de SBG Systems, el multihaz MB2 de Teledyne Odom Hydrographic, el ADCP RiverPro de Teledyne RD Instruments, una cámara y un ordenador de a bordo.

Ekinox-D
Ekinox-D es un sistema de navegación inercial todo en uno con receptor GNSS RTK integrado ideal para aplicaciones en las que el espacio es fundamental.
Este avanzado INS viene con una o dos antenas y proporciona orientación, ascenso y descenso (heave) y posición a nivel centimétrico.

Solicitar un presupuesto para Ekinox-D
¿Tiene alguna pregunta?
Bienvenido a nuestra sección de preguntas frecuentes. Aquí encontrará respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en contacto con nosotros directamente.
¿Cómo puedo combinar sistemas inerciales con un LIDAR para cartografiar con drones?
La combinación de sistemas inerciales SBG Systems con LiDAR para la cartografía con drones mejora la precisión y la fiabilidad en la captura de datos geoespaciales precisos.
A continuación se explica cómo funciona la integración y en qué beneficia a la cartografía basada en drones:
- Método de teledetección que utiliza impulsos láser para medir distancias a la superficie terrestre, creando un mapa 3D detallado del terreno o las estructuras.
- INS de SBG SystemsSystems combina una unidad de medición inercialIMU) con datos GNSS para proporcionar posicionamiento, orientacióncabeceo (pitch), balanceo (roll) y guiñada (raw)) y velocidad precisos, incluso en entornos sin GNSS.
El sistema inercial de SBG se sincroniza con los datos LiDAR. El INS rastrea con precisión la posición y orientación del dron, mientras que el LiDAR capta los detalles del terreno o de los objetos que hay debajo.
Conociendo la orientación exacta del dron, los datos LiDAR pueden situarse con precisión en el espacio 3D.
El componente GNSS proporciona posicionamiento global, mientras que la IMU ofrece datos de orientación y movimiento en tiempo real. La combinación garantiza que, incluso cuando la señal GNSS es débil o no está disponible (por ejemplo, cerca de edificios altos o bosques densos), el INS puede seguir rastreando la trayectoria y la posición del dron, lo que permite un mapeo LiDAR consistente.
¿Qué es el ecosondeo multihaz?
El ecosondeo multihaz (MBES) es una técnica avanzada de prospección hidrográfica que se utiliza para cartografiar el fondo marino y los accidentes submarinos con gran precisión.
A diferencia de las ecosondas tradicionales de un solo haz, que miden la profundidad en un único punto directamente bajo el buque, el MBES utiliza un conjunto de haces de sonar para captar simultáneamente mediciones de profundidad en una amplia franja del fondo marino. Esto permite elaborar mapas detallados y de alta resolución del terreno submarino, incluida la topografía, las características geológicas y los peligros potenciales.
Los sistemas MBES emiten ondas sonoras que viajan por el agua, rebotan en el fondo marino y regresan al buque. Analizando el tiempo que tardan en volver los ecos, el sistema calcula la profundidad en múltiples puntos, creando un mapa completo del paisaje submarino.
Esta tecnología es esencial para diversas aplicaciones, como la navegación, la construcción marina, la vigilancia del medio ambiente y la exploración de recursos, ya que proporciona datos fundamentales para la seguridad de las operaciones marítimas y la gestión sostenible de los recursos marinos.
¿Cuál es la diferencia entre RTK y PPK?
La cinemática en tiempo real (RTK) es una técnica de posicionamiento en la que las correcciones GNSS se transmiten casi en tiempo real, normalmente utilizando un flujo de corrección en formato RTCM. Sin embargo, garantizar las correcciones GNSS, en concreto su integridad, disponibilidad, cobertura y compatibilidad, puede plantear dificultades.
La principal ventaja del PPK sobre el postprocesamiento RTK es que las actividades de procesamiento de datos pueden optimizarse durante el postprocesamiento, incluido el procesamiento hacia delante y hacia atrás, mientras que en el procesamiento en tiempo real, cualquier interrupción o incompatibilidad en las correcciones y su transmisión dará lugar a un posicionamiento de menor precisión.
Una primera ventaja clave del postprocesamiento GNSS (PPK) frente al tiempo real (RTK) es que el sistema utilizado sobre el terreno no necesita disponer de un enlace de datos/radio para introducir las correcciones RTCM procedentes del CORS en el sistema INS.
La principal limitación para la adopción del postprocesado es la exigencia de que la aplicación final actúe sobre el entorno. Por otro lado, si su aplicación puede soportar el tiempo de procesamiento adicional necesario para producir una trayectoria optimizada, mejorará enormemente la calidad de los datos de todos sus entregables.