Ellipse compatible con Cobham satcom
La compatibilidad entre Ellipse-D y Aviator UAV 200 está declarada por el CNES para el apuntamiento de antenas. “El INS Ellipse-D de SBG tiene un diseño compacto notable que permitirá a los industriales de UAV mejorar y desarrollar los servicios que ofrecen; este es el saber hacer francés a la vanguardia de la innovación.” – Equipo del centro Cesars del CNES

El CNES, también llamado Centro Nacional de Estudios Espaciales, es una agencia francesa dedicada a los estudios espaciales. Opera bajo la supervisión de los Ministerios de Economía, Defensa e Investigación.
El centro CESARS de la CNES facilita el acceso a la comunicación por satélite
Una de las misiones es desarrollar, presentar y ejecutar el Programa Espacial Francés para el gobierno nacional. El CNES se centra en 5 áreas estratégicas: Ariane (lanzadores), Ciencias, Observación, Telecomunicaciones y Defensa.
El CNES creó el centro CESARS con el fin de difundir y aumentar el uso de Satcom en cualquier nuevo tipo de aplicación.
CESARS acoge libremente a empresas, laboratorios y colectivos para darles consejos, comentarios sobre las tecnologías, ayudarles realizando pruebas y dándoles acceso a la plataforma técnica en sí misma, incluyendo el hardware.
Una solución combinada para un control mejorado en tiempo real para la navegación de UAV
El equipo de Cesars suele probar y verificar los equipos en tierra antes de proceder con un proyecto. Aquí, el objetivo era confirmar la compatibilidad entre el AVIATOR UAV 200 de Cobham y el sistema de navegación inercial Ellipse-D de SBG Systems.
Ellipse-D es un sistema de navegación inercial en miniatura de doble antena que proporciona datos de navegación y orientación de alta precisión incluso en los entornos más difíciles.
Como todos los sensores de SBG, el INS/GNSS Ellipse-D se prueba y calibra exhaustivamente de -40°C a 85°C para garantizar un rendimiento óptimo.
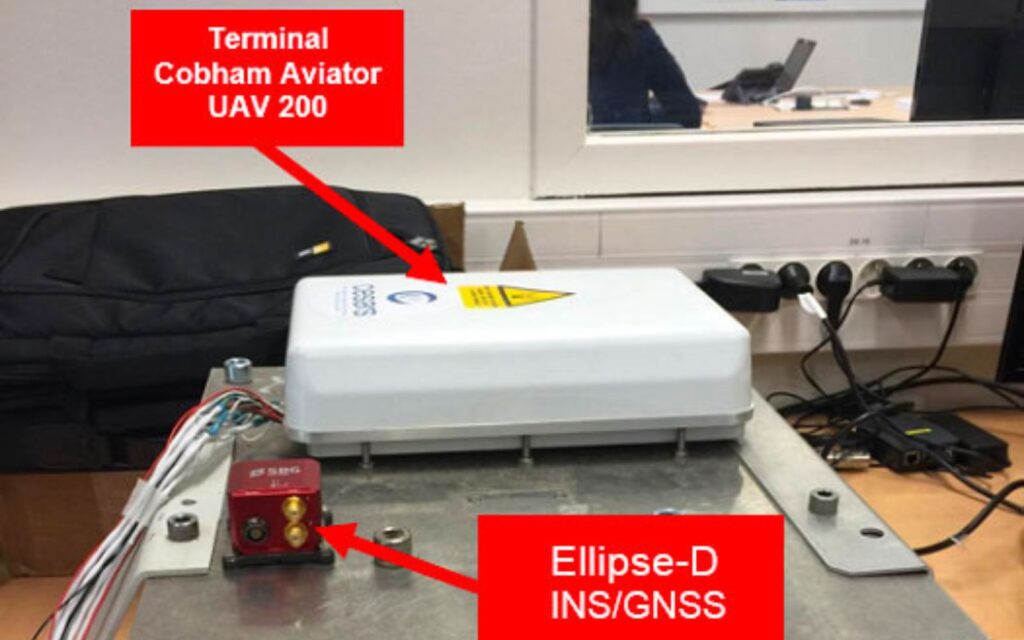
El AVIATOR UAV 200 es un terminal Satcom compacto todo en uno (antena y módem) que cabe en un pequeño UAV. Permite la conexión entre un UAV y un satélite, que actúa como intermediario entre el UAV y el control en tierra.
La solución de Cobham transmite información, como vídeos, desde el UAV al control en tierra a una velocidad de datos muy baja (200 kbps). El AVIATOR UAV 200 permite al UAV volar más tiempo y más lejos de la sala de control a través de la comunicación BLOS (Beyond Line of Sight).
¿Cómo funcionan en conjunto?
El sensor inercial envía entradas de alabeo, cabeceo, guiñada, rumbo y posición al AVIATOR UAV 200. Utilizamos estos datos para dirigir el haz de la antena del AVIATOR UAV 200 hacia un satélite de telecomunicaciones y rastrearlo con precisión.
Posteriormente, esto contribuye a mantener una transmisión de datos óptima. Cuanto más precisa sea la orientación de la antena, más estable será el enlace por satélite.
El INS/GNSS Ellipse-D proporciona un rumbo preciso y fiable al inicio, gracias a su receptor GNSS de doble antena, que es fundamental para estas aplicaciones. El sensor INS proporciona datos de movimiento y posición para ayudar al AVIATOR UAV 200 a mantener el enlace por satélite durante el vuelo.
En caso de spoofing, el INS ayudará a mantener un rumbo robusto gracias al filtro de Kalman extendido.
Pruebas estacionarias y en movimiento en configuración terrestre
En octubre de 2020, el CNES llevó a cabo algunas pruebas en el CST (Centro Espacial de Toulouse).
En primer lugar, se tomó contacto con el hardware y el software en el laboratorio. A continuación, el hardware se integró en el camión Oscar (OSCAR es un “laboratorio móvil” en el que se instalan y prueban antenas OTM, en las carreteras).
Tras comprobar que funcionaba correctamente en modo estacionario, se realizaron pruebas OTM dentro del CNES para verificar la compatibilidad entre el sensor inercial y el terminal.
Configuración del equipo
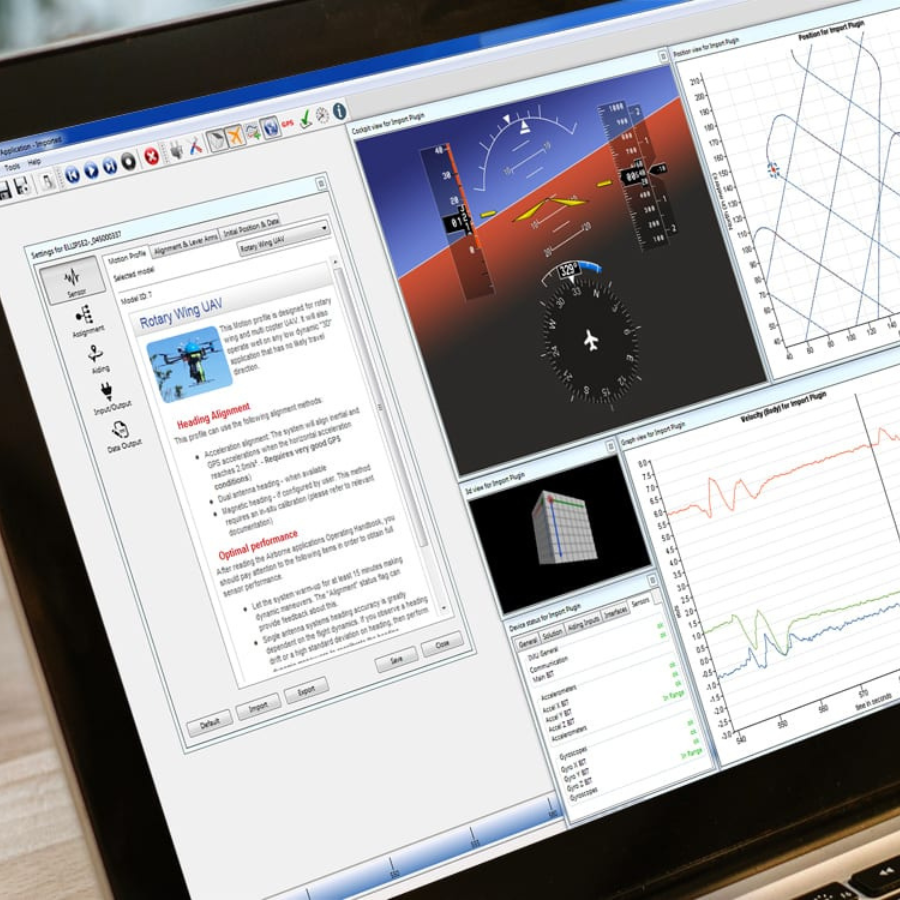
Durante la prueba en modo estacionario en el laboratorio, el CNES utilizó el software sbgcenter que viene con el Ellipse-D INS/GNSS para configurar el equipo para que se adapte mejor a su aplicación.
Este software proporciona diferentes perfiles de movimiento para ajustar el parámetro del filtro de Kalman extendido y ofrecer el mejor rendimiento para las condiciones de uso.
Ajustes elegidos en el software sbgCenter:
- Elección de perfil: “propósito general”. Era el más adecuado para el comportamiento del camión Oscar. Para una integración en un UAV, se debe elegir un perfil UAV.
- Configuración de las 2 antenas GNSS: deben estar a más de 45 cm del terminal Cobham, y en un "entorno" similar (lo suficientemente cerca, sin obstáculos entre ellas, deben experimentar la misma dinámica).
- Alineación del vehículo en relación con la unidad de control introducida (en nuestro caso están orientados a lo largo del mismo eje).
- Si se colocan otros sensores en el vehículo, también se pueden introducir (tubo pitot, acelerómetro…).
- El puerto com A del INS/GNSS Ellipse-D (el “main”) está conectado al PC para visualizar la información recibida en el sbgcenter. El puerto E está conectado al terminal Cobham. Ambos están configurados a 115200 baudios.
- En lo que respecta a la salida de datos, la frecuencia de transmisión de los mensajes AT_ITINS debe ser de 50 Hz como máximo.

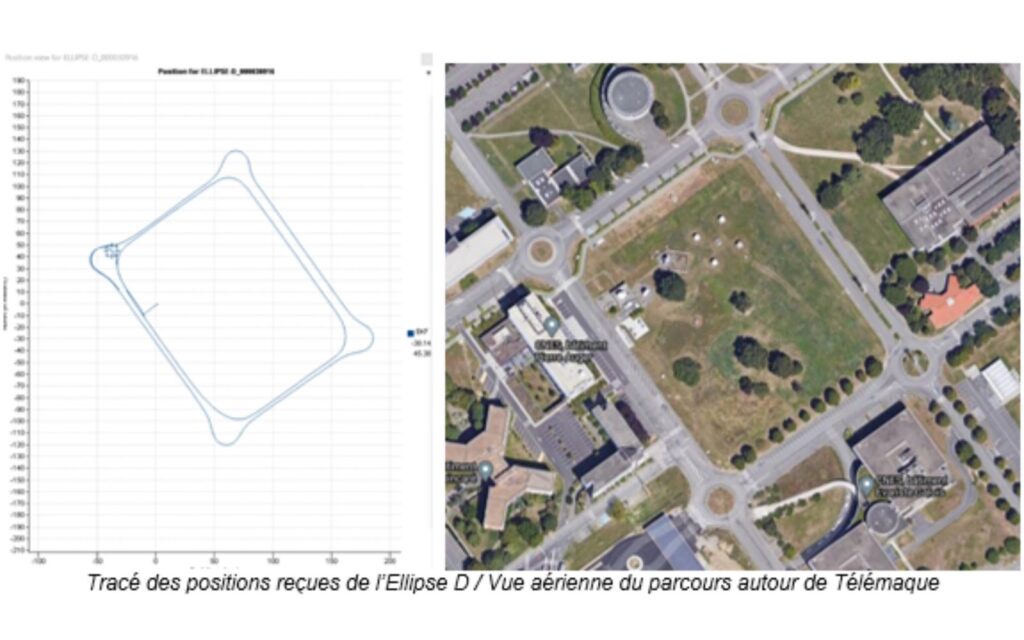
Integración y prueba OTM
Se realizaron dos pruebas “On-The-Move” en el mismo circuito. El circuito de prueba incluye líneas rectas y rotondas, y la velocidad máxima para completarlo fue de 30km/H
La primera prueba reveló que eran necesarios ajustes de configuración, especialmente la frecuencia de transmisión, que estaba demasiado alta. Durante la segunda prueba, la conexión fue estable, incluso al cambiar de dirección, validando la configuración.
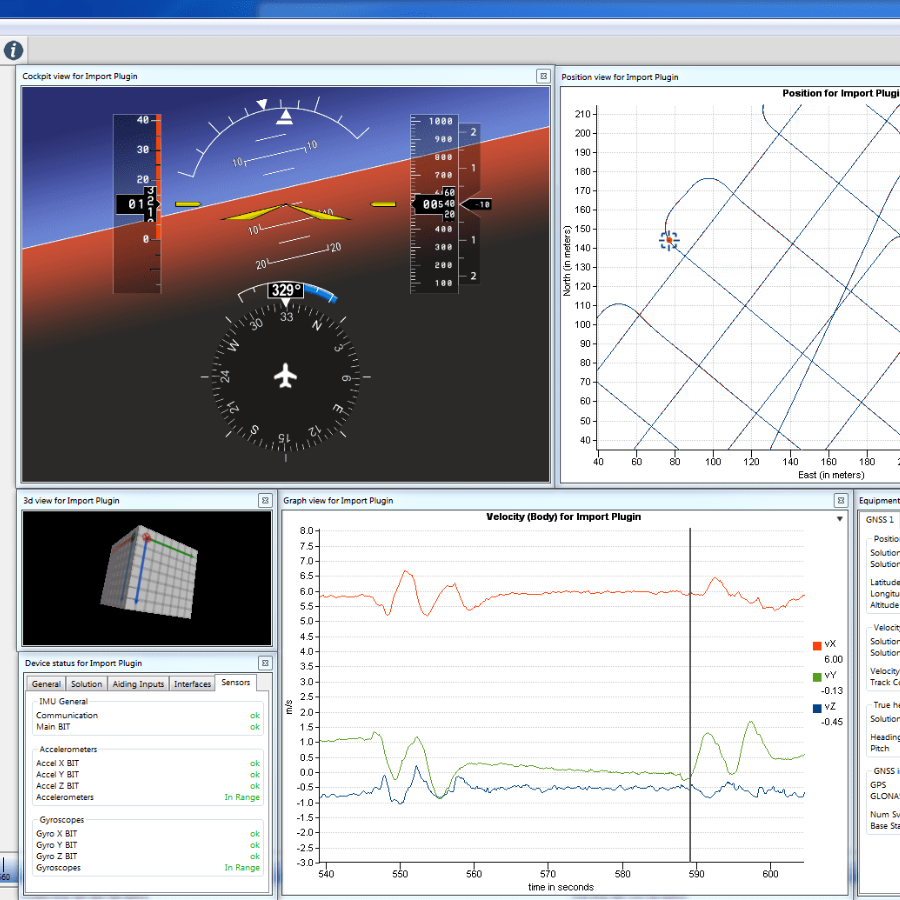
El ping pasó correctamente, y las latencias más largas observadas son las que siguen a un paso cerca de un edificio (posible enmascaramiento de la LOS). En la interfaz del Aviator UAV 200, todo funcionó (nivel de señal >50dbHz, GPS fix). Al grabar las sesiones de prueba, las secuencias pueden reproducirse en el SBGcenter a través de diferentes opciones:
- Vista de la posición: Muestra una figura con animaciones donde se puede seguir la trayectoria del vehículo.
- Vista de la cabina: Una interfaz gráfica de usuario con visualización de los datos de actitud del vehículo.

Conclusión
Después de todas estas pruebas, el equipo del centro Cesars del CNES llegó a la conclusión de que el sistema de navegación inercial Ellipse-D de SBG Systems es compatible con el terminal Cobham Aviator UAV 200, en una configuración de "tierra".
Esta prueba concluyente ofrece un amplio abanico de oportunidades a los usuarios de UAV.
Ellipse-D
El Ellipse-D es un sistema de navegación inercial que integra una doble antena y un GNSS RTK de doble frecuencia que es compatible con nuestro software de post-procesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del odómetro con Pulse o CAN OBDII para mejorar la precisión de la navegación a estima.

Solicitar presupuesto para Ellipse-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Los UAV utilizan GPS?
Los vehículos aéreos no tripulados (UAV), comúnmente conocidos como drones, suelen utilizar la tecnología del Sistema de Posicionamiento Global (GPS) para la navegación y el posicionamiento.
El GPS es un componente esencial del sistema de navegación de un UAV, ya que proporciona datos de localización en tiempo real que permiten al dron determinar su posición con precisión y ejecutar diversas tareas.
En los últimos años, este término ha sido sustituido por un nuevo término GNSS (*Global Navigation Satellite System*). GNSS se refiere a la categoría general de sistemas de navegación por satélite, que abarca el GPS y otros sistemas. En cambio, el GPS es un tipo específico de GNSS desarrollado por Estados Unidos.
¿Cómo controlar los retardos de salida en operaciones con UAV?
Controlar los retrasos en la salida en las operaciones de UAV es esencial para garantizar un rendimiento con capacidad de respuesta, una navegación precisa y una comunicación eficaz, especialmente en aplicaciones de defensa o de misión crítica.
La latencia de salida es un aspecto importante en las aplicaciones de control en tiempo real, donde una mayor latencia de salida podría degradar el rendimiento de los bucles de control. Nuestro software integrado INS ha sido diseñado para minimizar la latencia de salida: una vez que se muestrean los datos del sensor, el Filtro de Kalman Extendido (EKF) realiza cálculos pequeños y de tiempo constante antes de que se generen las salidas. Normalmente, el retardo de salida observado es inferior a un milisegundo.
La latencia de procesamiento debe añadirse a la latencia de transmisión de datos si se desea obtener el retardo total. Esta latencia de transmisión varía de una interfaz a otra. Por ejemplo, un mensaje de 50 bytes enviado en una interfaz UART a 115200 bps tardará 4 ms en completarse la transmisión. Considere la posibilidad de utilizar velocidades de transmisión más elevadas para minimizar la latencia de salida.
¿Qué es el geofencing de UAV?
El geofencing de UAV es una barrera virtual que define límites geográficos específicos dentro de los cuales puede operar un vehículo aéreo no tripulado (UAV).
Esta tecnología desempeña un papel fundamental en la mejora de la seguridad y el cumplimiento de las operaciones con drones, especialmente en zonas donde las actividades de vuelo pueden suponer un riesgo para las personas, la propiedad o el espacio aéreo restringido.
En industrias como los servicios de entrega, la construcción y la agricultura, el geofencing ayuda a garantizar que los drones operen dentro de áreas seguras y legales, evitando posibles conflictos y mejorando la eficiencia operativa.
Las fuerzas del orden y los servicios de emergencia pueden utilizar el geofencing para gestionar las operaciones de los UAV durante eventos públicos o emergencias, garantizando que los drones no entren en zonas sensibles.
Se puede emplear el geoperimetraje para proteger la fauna y los recursos naturales restringiendo el acceso de los drones a determinados hábitats o zonas de conservación.
¿Qué es una carga útil?
Una carga útil se refiere a cualquier equipo, dispositivo o material que un vehículo (dron, embarcación...) transporta para realizar su propósito previsto más allá de las funciones básicas. La carga útil está separada de los componentes necesarios para el funcionamiento del vehículo, como sus motores, batería y estructura.
Ejemplos de cargas útiles:
- Cámaras: cámaras de alta resolución, cámaras de imagen térmica...
- Sensores: LiDAR, sensores hiperespectrales, sensores químicos…
- Equipos de comunicación: radios, repetidores de señal…
- Instrumentos científicos: sensores meteorológicos, muestreadores de aire…
- Otro equipo especializado