Unsere Trägheitsnavigationssysteme wurden während einer dreitägigen hydrographischen Vermessung im Hamburger Hafengebiet (Deutschland) getestet. SBG Systems und MacArtney Germany GmbH rüsteten ein Vermessungsschiff mit einer kompletten Fächerecholot-Konfiguration aus und führten verschiedene Tests durch, um die Leistungsfähigkeit der SBG Inertialsysteme in verschiedenen anspruchsvollen Umgebungen zu zeigen. Erkunden Sie unseren bathymetrischen Test im Meer.
Testbedingungen
Zunächst wurden die INS in Echtzeit aufgezeichnet und mit den MBES-Daten des RESON SeaBat 7125 mit der Erfassungssoftware Teledyne PDS zusammengeführt. Anschließend wurden die hydrographischen Daten mit BeamWorx AutoClean nachbearbeitet und gefiltert.
Zusätzlich wurden die INS mit der SBG PPK Software Qinertia bearbeitet. Als Referenz dient schließlich die eng gekoppelte Horizon High-End-Faseroptiklösung.
Wir danken MacArtney Deutschland für die Unterstützung bei diesem bathymetrischen Test.
Kalibrierungsverfahren für bathymetrische Tests im Meer
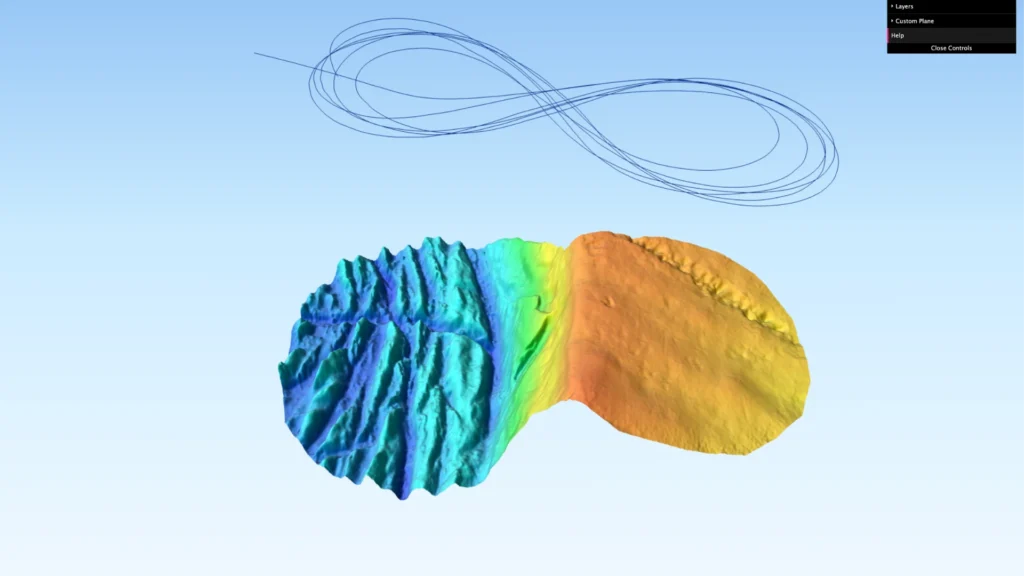
Kalibrierung auf der Grundlage von Bewegungs- und Trajektoriendaten der SBG Horizon während des bathymetrischen Tests im Meer.
Die Schnittstelle enthält die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topografische Merkmale.
Kalibrierungsberichte und -ergebnisse
Die Trägheitsnavigationssysteme von SBG wurden während einer dreitägigen hydrographischen Vermessung in Hamburg, Deutschland, getestet. Zusätzlich rüsteten SBG Systems und MacArtney Germany GmbH ein Vermessungsschiff mit einer kompletten Fächerecholot-Konfiguration aus, um die INS unter schwierigen Bedingungen zu bewerten.
Zu den getesteten Sensoren gehörten Horizon, Apogee, EkinoxNavsight Marine Series) und Ellipse. Das Team protokollierte rohe INS Daten in Echtzeit auf und führte sie mit MBES-Daten des Reson SeaBat 725 unter Verwendung von Teledyne PDS zusammen.
Anschließend wurden die hydrographischen Daten mit Beam Worx AutoClean nachbearbeitet und gefiltert, während Qinertia die INS übernahm. Darüber hinaus wurden mit GIS-Software 3D-Modelle und interaktive Webkarten erstellt, auf denen INS bathymetrische Berechnungen und Qualitätsebenen angezeigt wurden. Für die Formatierung der Layouts wurde JavaScript verwendet. Die Auswertung umfasste Kalibrierungsergebnisse, bathymetrische Daten, Trajektorien und Qualitätsindikatoren, wobei der Schwerpunkt auf der Bewegungs- und Positionierungsleistung lag.
Jeder bathymetrische Test auf See umfasste Vermessungen unter Brücken und in Kanälen mit GNSS-Ausfällen und Operationen bei starkem Wellengang. Darüber hinaus wurden in der Studie Vermessungsverbesserungen durch lose und eng gekoppelte Nachbearbeitung von INS analysiert.
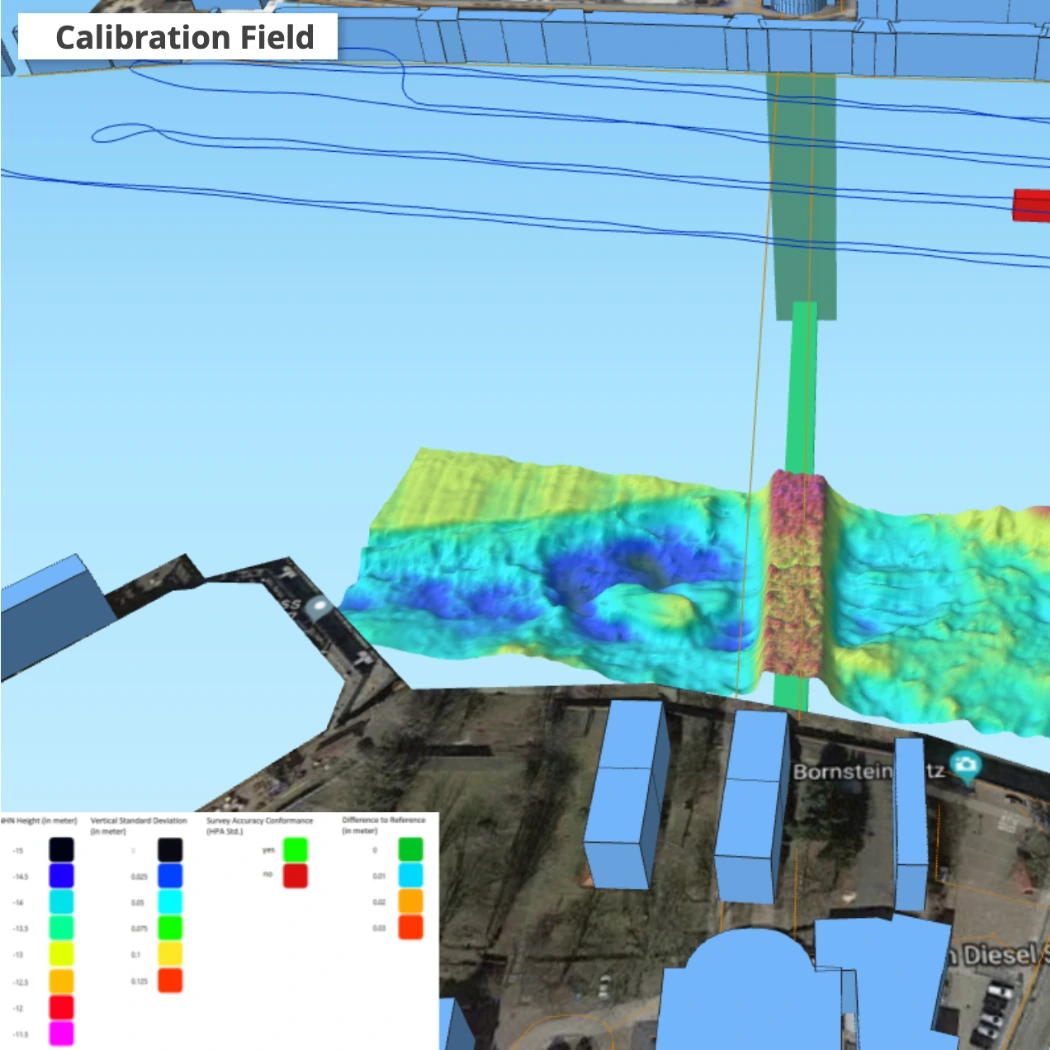
1 - Kalibrierungsfeld des Bewegungssensors
Die Gewährleistung einer hohen Präzision bei der Bewegungserfassung beginnt mit einer strengen Kalibrierung. Unsere Trägheitssensoren werden umfangreichen Tests unterzogen, um Verzerrungen, Skalierungsfaktoren und Ausrichtungsfehler zu korrigieren. Durch den Einsatz fortschrittlicher mehrachsiger Plattformen und kontrollierter Umgebungen verbessert dieser Prozess die Genauigkeit und Stabilität der Sensoren in einem breiten Spektrum von Betriebsbedingungen. Durch die Feinabstimmung des Ansprechverhaltens jedes Sensors gewährleistet die Kalibrierung eine zuverlässige Leistung in anspruchsvollen Anwendungen wie der Luft- und Raumfahrt, der Schifffahrt und der autonomen Navigation.
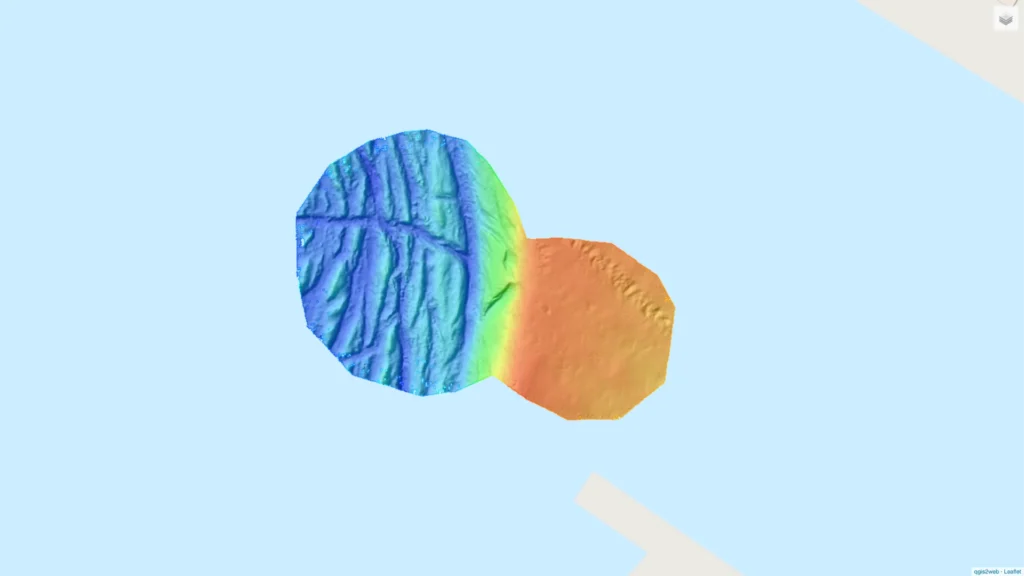
3D-Modell
3D-Visualisierung des Vermessungsgebiets für die Bewegungssensor-Kalibrierung, basierend auf Bewegungs- und Trajektoriendaten des SBG Horizon. Die Schnittstelle umfasst die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topografische Merkmale.
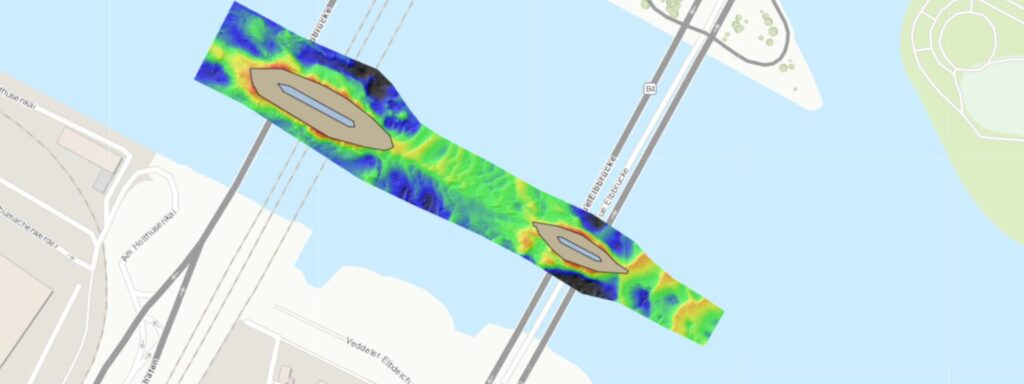
3D-Vermessungskarte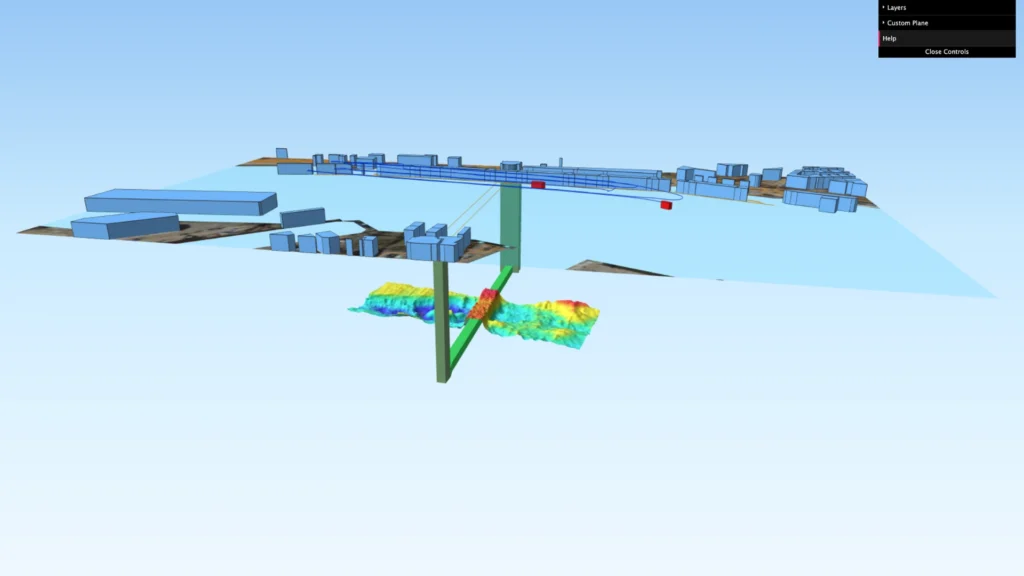
Kalibrierungsberichte/Offsets
Kalibrierungsberichte und empfohlene Montagewinkel für jedes SBG Inertialsystem. Die Patching-Software BeamworX Autopatch erstellt alle diese Berichte. Während einer Ausrichtungsuntersuchung hat das Team die Offsets für jeden Sensor auf der Grundlage der Schiffskonfiguration und der Sensoreinstellung gemessen und sie dann mit Cremer Caplan ausgewertet.
Test zur präzisen Punktpositionierung
Test des neuen PPP-Verarbeitungsmodus in Qinertia. Bathymetrische Oberflächen und Qualitätsschichten wurden auf der Grundlage von RTK- (Echtzeit) und PPP- (Post-Processing) INS berechnet.
2 - Trägheitsprüfungen
Inertialsensoren werden in kontrollierten Umgebungen strengen Tests unterzogen, um hohe Präzision und Zuverlässigkeit zu gewährleisten. Bei diesen Tests werden wichtige Leistungskennzahlen wie die Stabilität der Vorspannung, die Genauigkeit des Skalierungsfaktors, der Geräuschpegel und die dynamische Reaktion bewertet. Durch die Simulation von realen Bedingungen, einschließlich Temperaturschwankungen und Vibrationsprofilen, validieren die Ingenieure die Belastbarkeit und Genauigkeit des Sensors. Durch umfangreiche Inertialtests garantieren die Hersteller eine optimale Leistung für missionskritische Anwendungen in den Bereichen Verteidigung, Luft- und Raumfahrt und autonome Systeme.
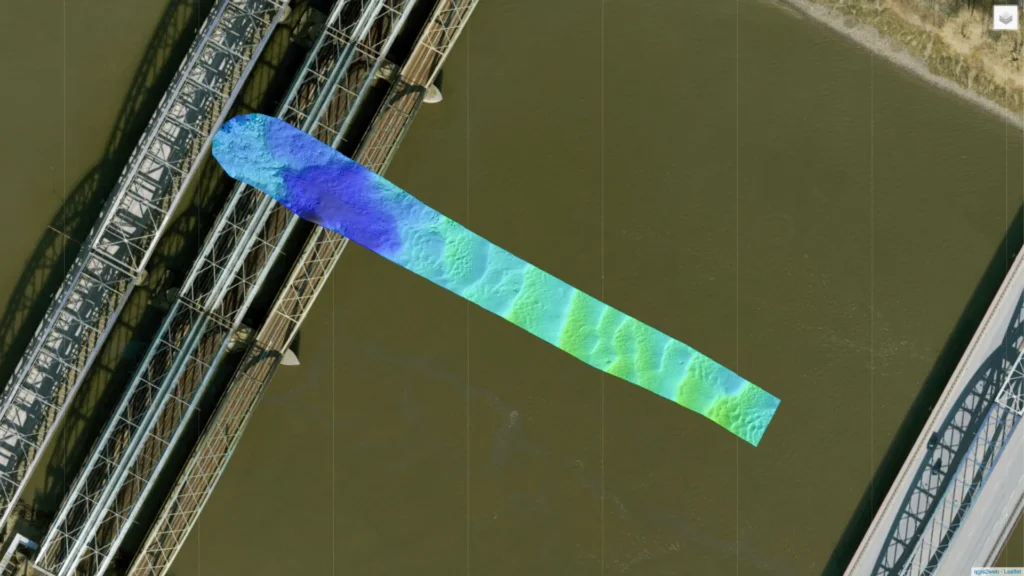
Elbbrücken Webkarte
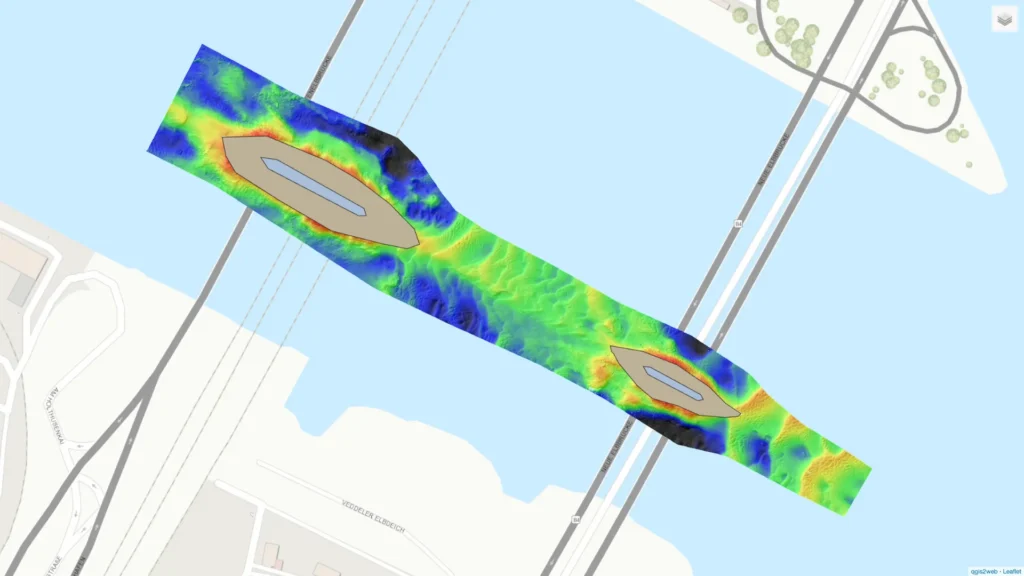
Webkarte der Flussoberfläche der Elbe entlang der Elbbrücken und bathymetrische Qualitätsmessungen sowie Trajektorien. Referenz für die Difference-Flächen ist eine eng gekoppelte Horizon-Lösung. Der Vergleichssensor ist ein faseroptisches High-End-System.
Elbbrücken 3D Modell
3D-Visualisierung der Bathymetrie unterhalb der Elbbrücken in Hamburg, basierend auf Trajektionsdaten des SBG Horizon. Die Oberfläche enthält die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topographische Merkmale.
Elbbrücken 3D Modell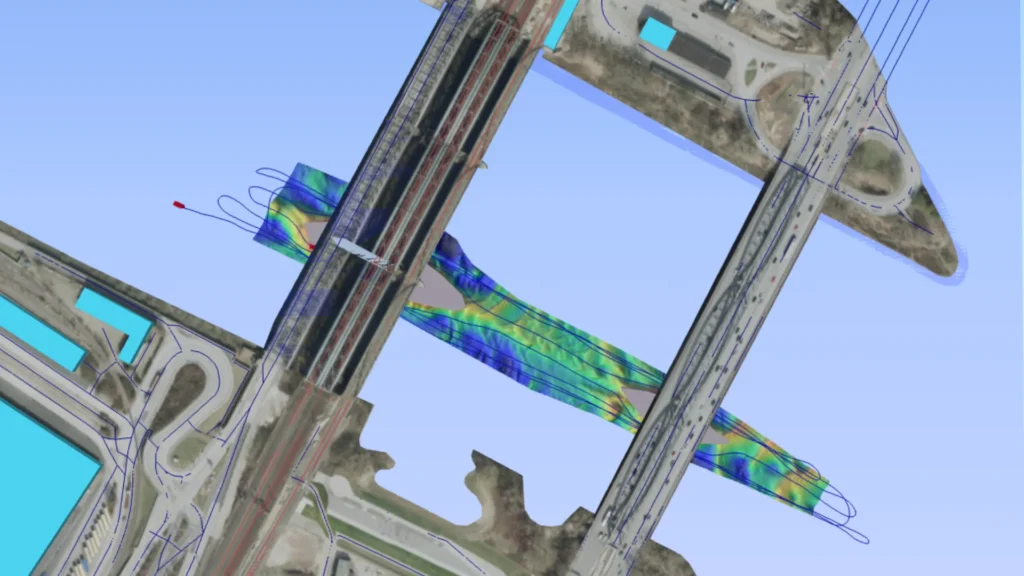
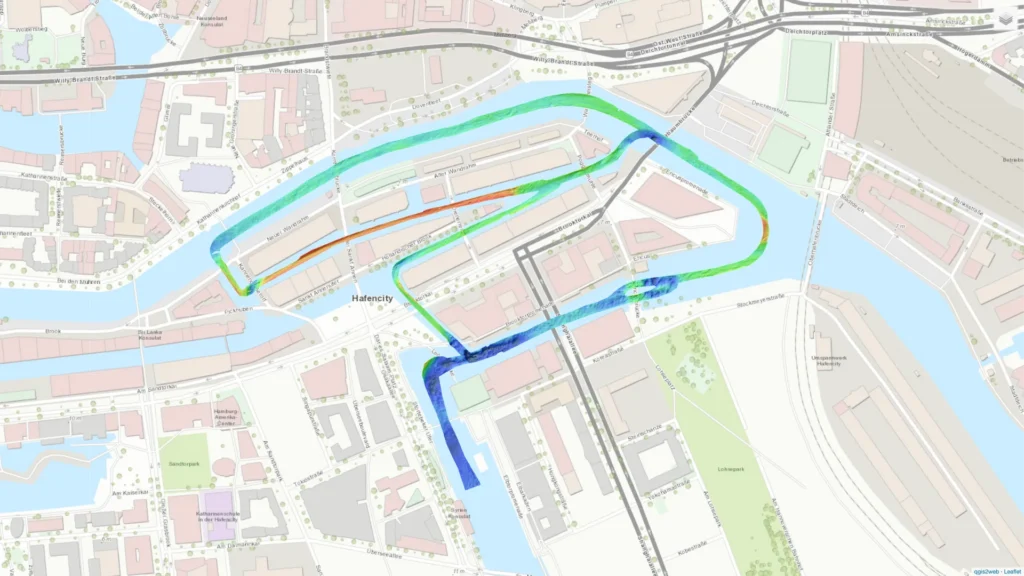
Speicherstadt Webkarte
Webkarte der Flussoberfläche der Elbe entlang der Kanäle der Speicherstadt und bathymetrische Qualitätsmessungen, plus Trajektorien. Referenz für die Difference surfaces ist eine eng gekoppelte Horizon-Lösung. Der Vergleichssensor ist ein faseroptisches High-End-System.
Bathymetrisches 3D-Modell der Kanäle der Speicherstadt
3D-Visualisierung der Bathymetrie entlang der Kanäle der Speicherstadt, basierend auf Trajektionsdaten des SBG Horizon. Die Oberfläche enthält die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topographische Merkmale.
Speicherstadt 3D-Modell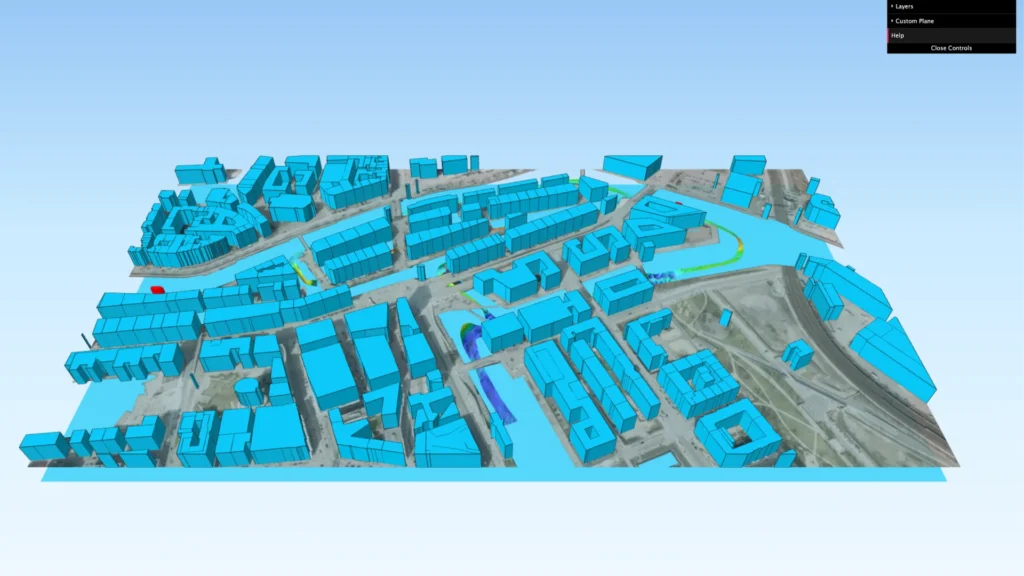
Webkarte Unterführung 180° drehen
Webkarte der Flussoberfläche der Elbe entlang der Elbbrücken und bathymetrische Qualitätsmessungen sowie Trajektorien. Die Vermessung beinhaltet eine volle 180°-Drehung während eines kompletten RTK-Ausfalls. Referenz für die Differenzflächen und das Vergleichssystem ist eine nachbearbeitete faseroptische Sensorlösung.
3 - Bewegungstests
Diese Tests simulieren die Dynamik in der realen Welt und bewerten die Leistung unter verschiedenen Bedingungen wie schnellen Beschleunigungen, Vibrationen und Rotationsbewegungen. Durch die Analyse der Sensorreaktionen verfeinern wir die Kalibrierungs- und Kompensationsalgorithmen, um die Präzision in den anspruchsvollsten Anwendungen zu optimieren.
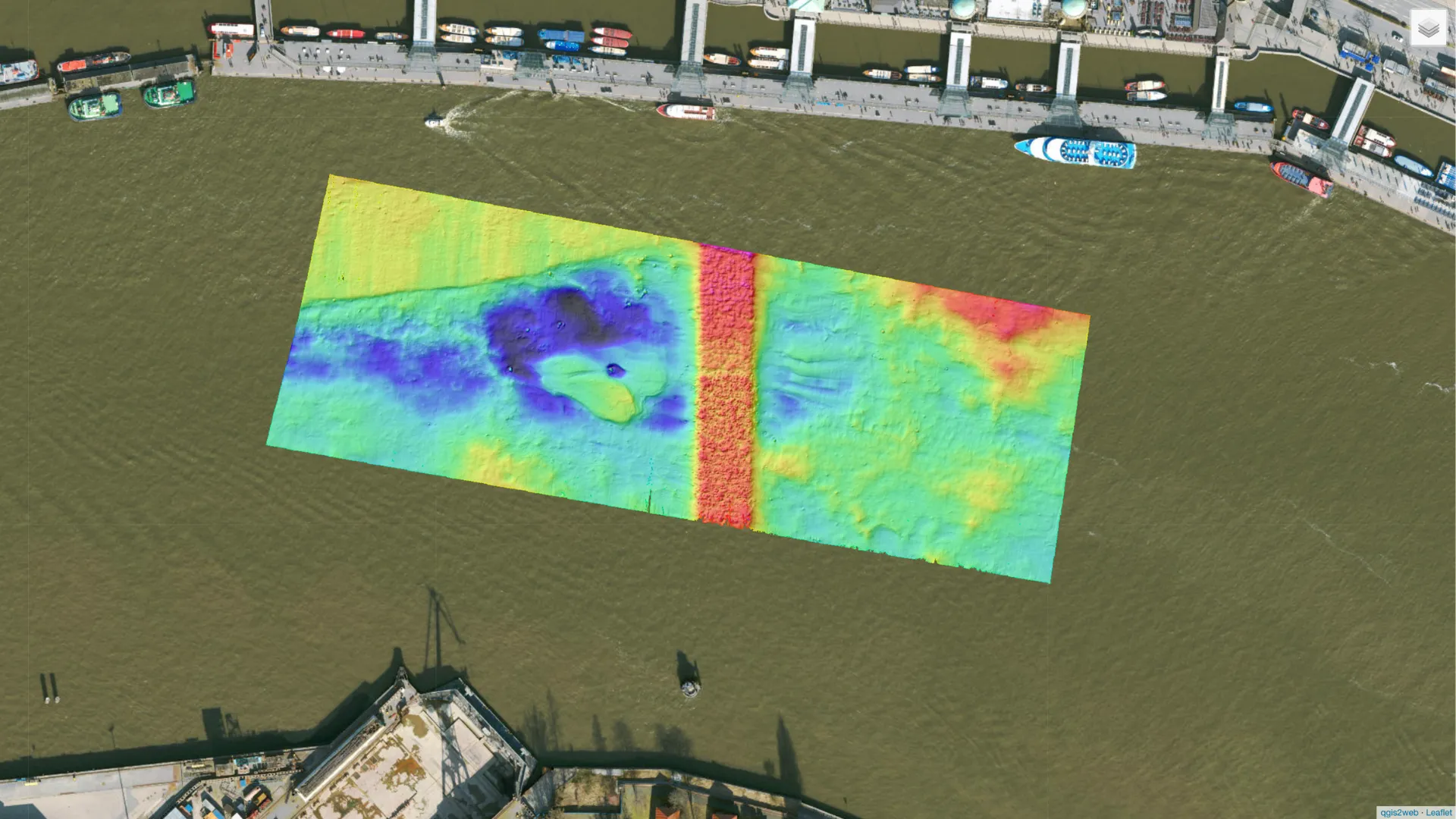
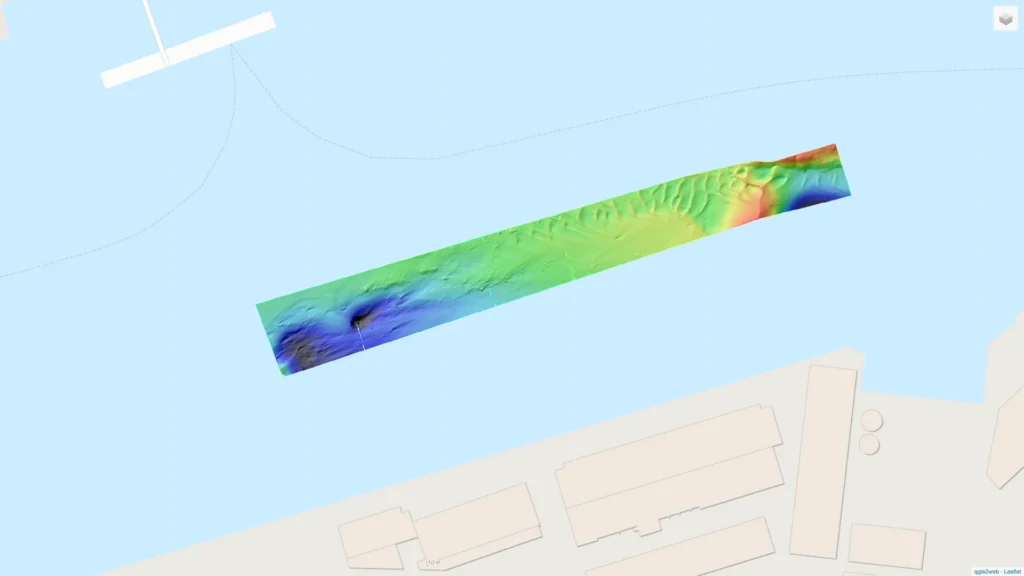
Hafen Hamburg Webkarte
Webkarte der Flussoberfläche der Elbe in der Nähe der Docks des Hamburger Hafens und bathymetrische Qualitätsmessungen plus Trajektorie. Während dieses Tests wurden dynamische Bewegungsmuster aufgezeichnet, die auf den durch vorbeifahrende Schiffe verursachten Seegang zurückzuführen sind. Referenz für die Differenzflächen ist eine faseroptische Echtzeit-Sensorlösung.
3D-Modell des Hamburger Hafens
3D-Visualisierung der Bathymetrie der Elbe in der Nähe der Docks des Hamburger Hafens, basierend auf Trajektionsdaten des SBG Horizon. Die Schnittstelle umfasst die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topographische Merkmale.
Hafen Hamburg Webkarte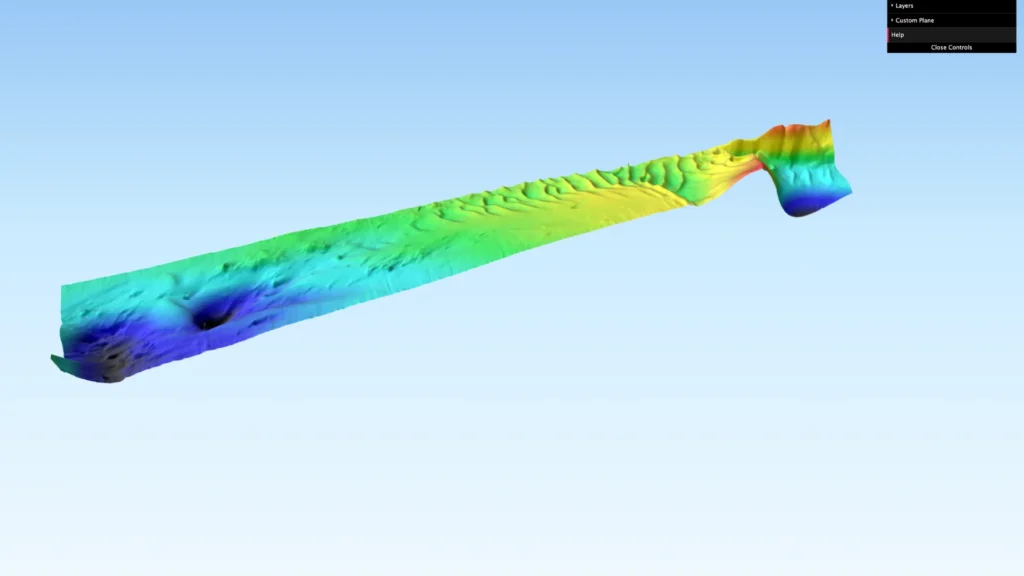
8 Abbildung richtung webmap
Webmap der Flussoberfläche der Elbe während eines 8-Figuren-Manövers und bathymetrische Qualitätsmessungen plus Trajektorie. Dieses Manöver ist vor allem im Hinblick auf die Leistungsfähigkeit der Sensoren während richtung maritimen bathymetrischen Tests konditioniert. Referenz für die Differenzflächen ist eine faseroptische Echtzeit-Sensorlösung.
8 Abbildung richtung 3D-Modell
3D-Visualisierung der Bathymetrie der Elbe während eines 8-Figuren-Manövers, basierend auf Trajektionsdaten des SBG Horizon. Die Schnittstelle umfasst die Vermessungslinie, die berechnete Bathymetrie, qualitätsanzeigende Schichten und topographische Merkmale.
3D-Vermessungsmodell Webkarte