
In einem alltäglichen Szenario ist die Genauigkeit eines eigenständigen globalen Satellitennavigationssystems(GNSS) mehr als ausreichend, um jemandem zu helfen, seinen Weg zu finden, aber viele Anwendungen erfordern eine höhere Genauigkeit. Es wurden zahlreiche Technologien zur Differenzialkorrektur entwickelt, um die GNSS-Genauigkeit auf bis zu 1 cm zu verbessern, was eine breite Palette neuer Anwendungen ermöglicht.
Um eine solche Genauigkeit zu erreichen, muss der für die Berechnungen und die Positionsbestimmung verwendete Bezugsrahmen beachtet werden, ein Thema, das in Geodäsie und Datumstransformationen behandelt wird und das den Rahmen dieses Artikels sprengen würde.
GNSS-Korrekturen
Die Verbesserung der GNSS-Genauigkeit beruht auf der Korrektur verschiedener Fehler.
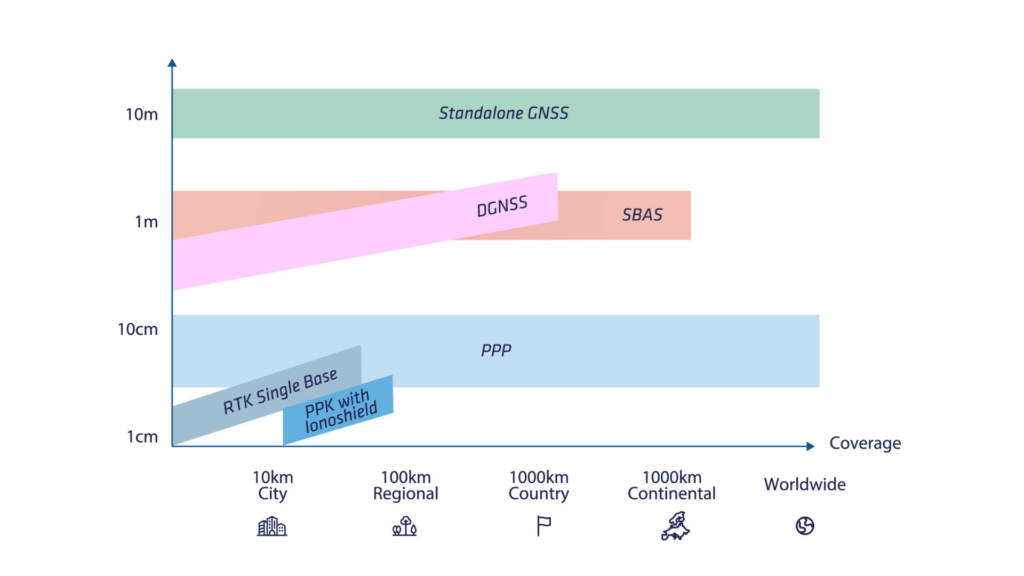
Es gibt viele Arten von Korrekturen, die unterschiedliche Abdeckungsgrade und Leistungen bieten.
Die wichtigsten sind in der folgenden Tabelle aufgeführt. In diesem Artikel werden die Grundlagen der gebräuchlichsten Korrekturen behandelt: eine kurze Erläuterung von DGNSS, gefolgt von ausführlichen Erklärungen zu SBAS und RTK; außerdem werden die Vorteile von PPK beschrieben.
Der nächste Artikel in dieser Reihe wird sich näher mit Ionoshield und PPP befassen.
Differenzielles GNSS (DGNSS)
Das traditionelle codebasierte DGNSS geht von einer einfachen Annahme aus: Satellitenfehler und lokale atmosphärische Fehler werden in kleinen Gebieten als gleich groß angenommen. Ein Paar GPS-Empfänger kann dann verwendet werden, um sowohl atmosphärische (ionosphärische und troposphärische) als auch satellitenbedingte Fehler auszugleichen und so die Navigationsleistung zu verbessern.
Bei dieser Betriebsart wird ein GNSS-Empfänger der Basisstation in einem Umkreis von einigen Kilometern um den GNSS-Empfänger des Rovers installiert. Die Basisstation überträgt eine Reihe von Korrekturen über ein RF- oder GSM-Modem an den Rover-Empfänger. Der Rover-Empfänger kann diese Korrekturen dann zur Berechnung einer differentiellen Position (relativ zur Basisstation) verwenden.
Diese Technik kann die Navigationsgenauigkeit bis in den Submeterbereich verbessern, ist aber inzwischen überholt, da RTK zum Standard für hochgenaue Positionierung geworden ist.
SBAS (Satellitengestütztes Erfassungssystem)
SBAS wurde entwickelt, um die sichere Navigation von Zivilflugzeugen zu ermöglichen. Seitdem wurde es für viele andere Endnutzeranwendungen eingesetzt, die eine höhere Genauigkeit als ein eigenständiger GNSS-Empfänger erfordern.
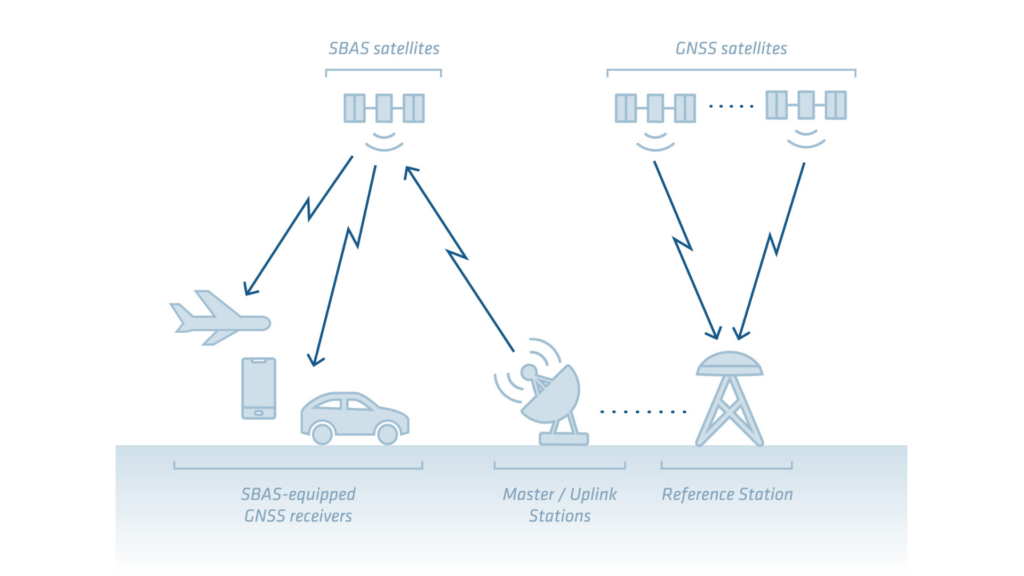
Das Konzept von SBAS besteht darin, ein Netz von Referenzstationen zu nutzen, um Korrekturen zu berechnen, die die GPS-Leistung in einem großen Gebiet (kontinentale Abdeckung) verbessern können.
Diese Korrekturen werden dann von speziellen geostationären SBAS-Satelliten ausgestrahlt. Moderne GNSS-Empfänger können diese Korrekturen direkt über ihre reguläre GNSS-Antenne verfolgen und in ihrem Positionierungssystem verwenden, wie z. B. , SBAS, das eine Genauigkeit von 1 Meter bietet.
Das Hauptziel aller SBAS-Konstellationen ist nicht, eine maximale Genauigkeit zu erreichen, sondern GNSS in die Lage zu versetzen, eine Mindestgenauigkeit für die vorgesehene Anwendung (Flugzeugnavigation und -landung) mit einem zusätzlichen Konzept der Integrität (genaue Messung des Positionsfehlers) zu erreichen.
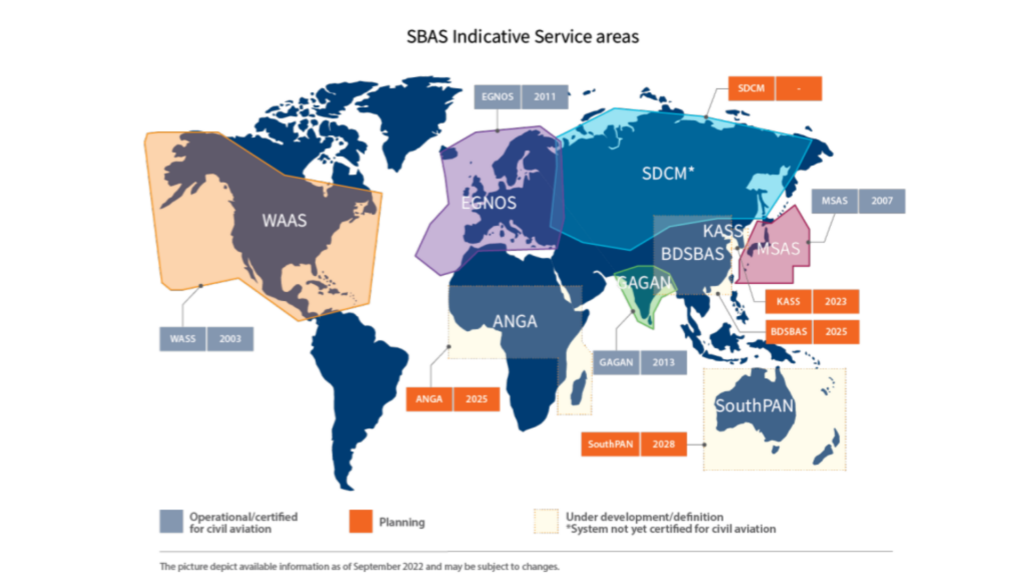
Derzeit werden unter anderem SBAS eingesetzt:
- WAAS für nordamerikanische Länder
- EGNOS für Europa
- GAGAN für Indien
- MSAS für Japan
Die meisten aktuellen SBAS bieten jedoch nur Korrekturen für die GPS-Konstellation, was sie für die Landnavigation suboptimal macht. Künftige SBAS-Lösungen (z. B. EGNOS V2) werden Korrekturen für mehrere Konstellationen bieten.
Technologie hinter SBAS
Die verschiedenen SBAS-Lösungen verwenden dieselbe Technologie, um Korrekturen zu liefern. Sie bieten Korrekturen für:
- Fehler in der Satellitenuhr
- Abweichungen von der Satellitenbahn
- Atmosphärische Fehler
SBAS liefert auch Informationen über die Integrität der Satelliten, die verwendet werden können, um Daten von nicht funktionierenden Satelliten zurückzuweisen.
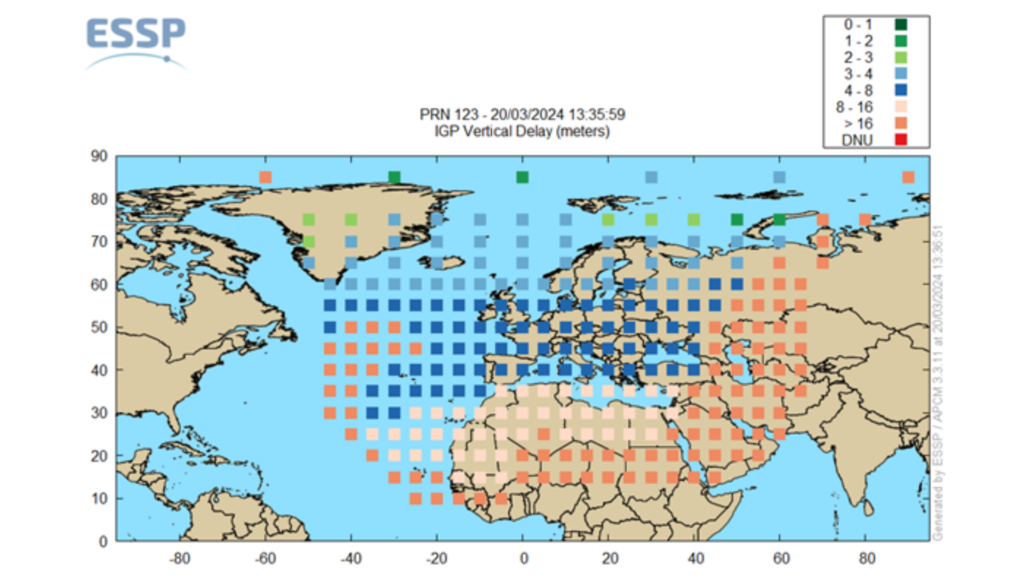
Atmosphärische Korrekturen werden ebenfalls über das Netz der Basisstationen berechnet, um ein Muster der atmosphärischen Fehler zu erstellen. Der übertragene Fehlerwert entspricht der vertikalen Verzögerung, die durch die Atmosphäre an bestimmten Punkten, den IGP (Ionospheric Grid Points), verursacht wird. Der Empfänger kann dann die Verzögerung für die verschiedenen Signale der einzelnen Satelliten korrigieren.
Mithilfe der von SBAS bereitgestellten Informationen kann der Empfänger Fehler in der Pseudoentfernungsmessung korrigieren und so die Genauigkeit der Position auf etwa 1,2 m RMS horizontal und 1,6 m RMS vertikal verbessern. Dies ist eine erhebliche Verbesserung gegenüber dem autonomen GNSS, insbesondere für die vertikale Komponente.
Kinematik in Echtzeit (RTK) und Post-Processed Kinematic (PPK)
Die RTK-Technologie wurde erstmals Mitte der 1990er Jahre für Vermessungsanwendungen eingeführt. Wie das herkömmliche Differential Global Positioning System (DGPS) basiert RTK auf einer genau georteten Basisstation und Rover-GNSS-Empfängern.
Zwei wichtige Berechnungsschritte ermöglichen eine zentimetergenaue Positionierung:
- Doppelte Differenz
- Trägerphasenmessung und Behebung von Mehrdeutigkeiten
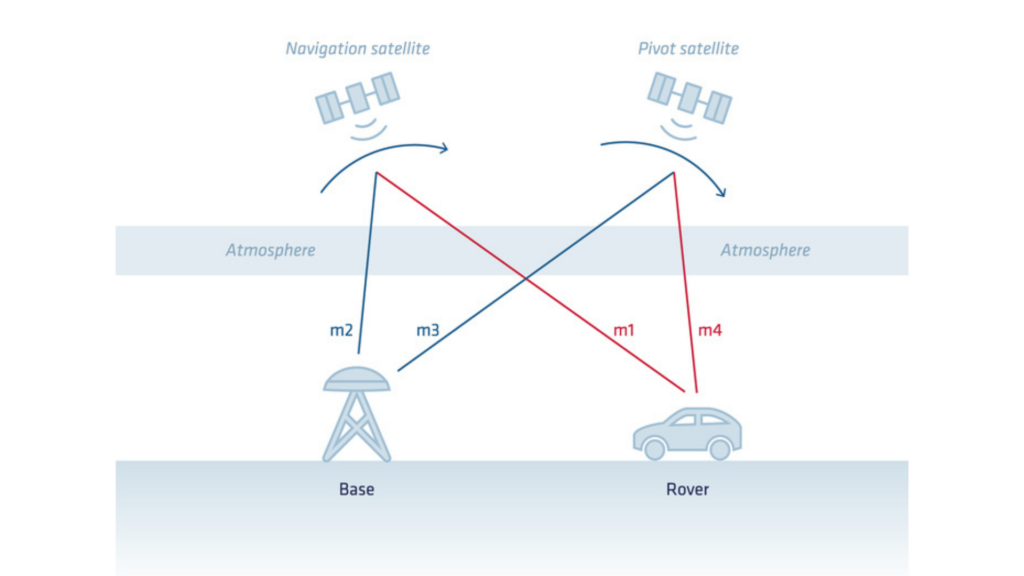
Doppelte Differenz
DGPS verwendet im Allgemeinen nur einfache Differenz- und Codemessungen.
RTK hingegen fügt Phasenmessungen hinzu und verwendet einen "Doppeldifferenz"-Ansatz. Bei dieser Methode werden die Basismessungen von den Rover-Messungen und alle Messungen der Navigationssatelliten von einem Pivot-Satelliten subtrahiert.
Dieser Ansatz kann alle satellitenbedingten Fehler, empfängerbedingten Fehler sowie die atmosphärischen Fehler kompensieren, die in der Nähe der Basisstation als konstant angenommen werden.
Aus dieser Berechnung ergibt sich:
- Die Position des Rovers (Breitengrad/Längengrad/Höhengrad) im Bezugssystem der Basisstation
- Die Zeit des Rovers
Die Entfernung zwischen der Basisstation und dem Rover wird als Basislinie bezeichnet und ist ein Schlüsselfaktor bei RTK. Mit zunehmender Basislinie erhöht sich das Fehlerbudget geringfügig, da die üblichen atmosphärischen Fehler und die üblichen Satellitenbahnfehler nicht vollständig aufgehoben werden. Dies ist der typische "+1ppm", der in den Spezifikationen für die RTK-Positionsgenauigkeit angegeben ist.
Trägerphasenmessung und Behebung von Mehrdeutigkeiten
Die Trägerphasenmessung, die in unserem vorherigen Artikel vorgestellt wurde, ist erforderlich, um die Fehler auf den Zentimeterbereich zu reduzieren.
Die Herausforderung bei Trägerphasenmessungen besteht darin, dass sie von Natur aus mehrdeutig (oder unvollständig) sind. Bei der Messung fehlt eine ganzzahlige Anzahl von Trägerphasenzyklen. Dieser fehlende Teil wird auch als "Mehrdeutigkeit" bezeichnet.
Der RTK-Positionierungsprozess (Real-Time Kinematic) beginnt mit der Schätzung dieser Mehrdeutigkeiten. Dieser Prozess wird auch als "RTK-Float"-Modus bezeichnet. In diesem Modus konvergieren die Mehrdeutigkeiten langsam, sind aber keine ganzzahligen Werte. Dadurch kann der Empfänger die Position glätten und eine Genauigkeit von etwa einem Dezimeter erreichen.
Um eine maximale Genauigkeit und Robustheit zu erreichen, besteht der nächste Schritt darin, den ganzzahligen Wert für jede dieser Mehrdeutigkeiten in Echtzeit zu ermitteln. Dieser Vorgang wird als Auflösung ganzzahliger Mehrdeutigkeiten bezeichnet.
Das Ergebnis der Mehrdeutigkeitsauflösung maximiert die RTK-Genauigkeit und bietet eine größere Robustheit. Dies wird allgemein als "RTK Fixed"-Modus bezeichnet.
Wenn die Phasenverfolgung zu einem bestimmten Satelliten unterbrochen wird, kommt es zu einem "Cycle Slip"-Ereignis und die ganzzahlige Mehrdeutigkeit für diesen Satelliten muss erneut aufgelöst werden. Aus diesem Grund wirken sich zu viele Cycle-Slips (und insbesondere Cycle-Slips auf allen Satelliten gleichzeitig) negativ auf die RTK-Leistung aus. Eine gute Antenne und Antennenplatzierung sowie eine saubere HF-Umgebung sind unerlässlich, um diese Ereignisse zu begrenzen.
Nachbearbeitung der Kinematik
Wie wir gesehen haben, ist RTK die Anwendung dieser Korrekturen "in Echtzeit", was bedeutet, dass der Rover eine Datenverbindung zur Basisstation haben muss, um die RTK-Verarbeitung im Feld zu berechnen.
Einige Anwendungen benötigen die Flugbahn nicht in Echtzeit, sondern könnten von einer höheren Genauigkeit oder einem einfacheren Aufbau profitieren. Post Processing Kinematic (PPK) kann diese Anforderungen erfüllen. Mit PPK sammelt der Rover während der Datenerfassung seine eigenen GNSS-Rohdaten, ohne Echtzeitkorrekturen zu erhalten. Später werden diese Daten mit präzisen Informationen von einer Basisstation oder einem Netz von Referenzstationen nachbearbeitet.
PPK ermöglicht mehr Flexibilität bei der Datenerfassung, da es nicht auf Echtzeitkorrekturen angewiesen ist. Sie wird häufig in Szenarien eingesetzt, in denen eine Echtzeitkommunikation schwierig oder unnötig ist, wie z. B. bei Luftbildkartierungen, Drohnenvermessungen oder in der wissenschaftlichen Forschung.
Vorteile der Verwendung von PPK für Differentialkorrekturen.
PPK bietet die folgenden Hauptvorteile bei der Verarbeitung von GNSS:
- Verbesserter Arbeitsablauf vor Ort: Ein großer Teil der Kosten einer RTK-basierten Mission besteht darin, sicherzustellen, dass eine Basisstation in der Nähe ist, eine Basisstation einzurichten, falls erforderlich, eine zuverlässige Datenverbindung zu gewährleisten usw. Qinertia verfügt über eine große Anzahl integrierter CORS-Netzwerke und einen direkten Zugang zu Netzwerken von Drittanbietern. Damit entfällt die Komplexität der Sicherstellung der Verfügbarkeit einer Basisstation und der Einrichtung einer zuverlässigen Datenverbindung.
- Verbesserte Qualitätskontrolle: Viele Qualitätsindikatoren helfen bei der Bewertung der tatsächlichen Leistung einer Verarbeitung. Dazu gehören erweiterte Statistiken, die Trennung (Differenz zwischen der während der Vorwärts- und der Rückwärtsverarbeitung berechneten lage ) sowie Indikatoren für GNSS-Signale.
- Insgesamt verbesserte Leistung: Die Auflösung von RTK-Mehrdeutigkeiten kann einige Zeit in Anspruch nehmen (von einigen Sekunden bis zu einigen Minuten, abhängig von der Entfernung zur Basisstation und den atmosphärischen Bedingungen). Dies kann zu Beginn einer Erfassung oder bei schwierigen GNSS-Bedingungen erheblich sein. PPK entschärft diese Effekte, indem es die Daten sowohl in Vorwärts- als auch in Rückwärtsrichtung verarbeitet, um die Fixrate zu maximieren. Die Leistung kann auch durch den Einsatz fortschrittlicherer Algorithmen oder durch die Verwendung genauer Satellitenephemeriden verbessert werden.