
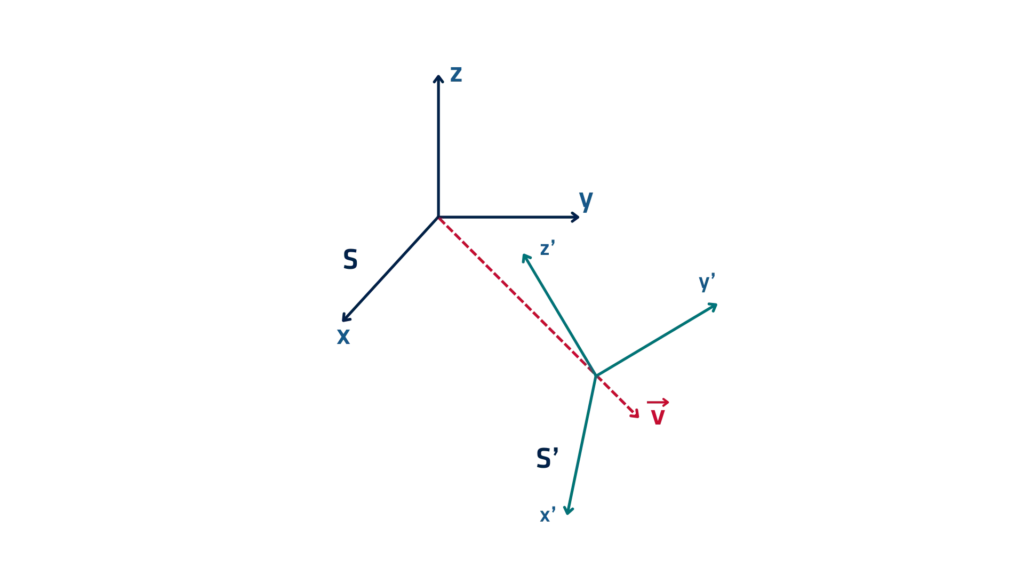
Ein Inertialsystem ist ein Koordinatensystem, in dem Objekte den Newtonschen Bewegungsgesetzen folgen, ohne dass fiktive oder externe Kräfte berücksichtigt werden müssen. Mit anderen Worten, es ist ein nicht beschleunigtes System – entweder in Ruhe oder in Bewegung mit konstanter Geschwindigkeit –, in dem ein Körper in Ruhe bleibt oder sich gleichförmig weiterbewegt, sofern keine äußere Kraft auf ihn wirkt. Wissenschaftler und Ingenieure verlassen sich auf Inertialsysteme, um Bewegungen im Weltraum, in der Luftfahrt, in der Schifffahrt und in der Robotik präzise zu analysieren.
Definierende Eigenschaften
Ein Inertialsystem beschleunigt oder rotiert nicht. Diese Stabilität macht es ideal für die Anwendung von Newtons zweitem Gesetz, F = ma, ohne Korrekturkräfte wie Coriolis- oder Zentrifugalkräfte einzuführen. Beispielsweise kann der Weltraum außerhalb der Erdatmosphäre ein Inertialsystem sehr gut annähern, da es nur minimale Gravitationsstörungen oder Rotationseinflüsse gibt. Dies macht ihn perfekt für die Modellierung der Raumfahrzeugdynamik und der Satellitenbewegung.
Bei Weltraummissionen verwenden Ingenieure ein Inertialkoordinatensystem, um die Flugbahnen von Raumfahrzeugen zu berechnen. Beim Start eines Satelliten legt die Missionskontrolle dessen Anfangsposition und -geschwindigkeit in einem Inertialkoordinatensystem fest. Während sich der Satellit bewegt, folgt er weiterhin seiner vorhergesagten Bahn, sofern keine Triebwerke Kräfte ausüben.
Ein weiteres Beispiel ist die Navigation in der Luftfahrt. Obwohl die Erdoberfläche aufgrund ihrer Rotation kein perfekter Inertialbezugssystem ist, approximieren hochpräzise Trägheitsnavigationssysteme (INS) an Bord von Jets und Raketen die Bewegung für kurze Zeiträume innerhalb eines Inertialbezugssystems. Dadurch können diese Systeme auch ohne GPS genaue Positions- und Geschwindigkeitsdaten liefern.
Bei der Unterwassernavigation operieren U-Boote oft ohne externe Signale. Ihr INS die Position auf der Grundlage eines angenommenen Inertialsystems und nutzt dabei Beschleunigungsmesser und Gyroskope, um die Bewegung im Zeitverlauf zu verfolgen.
In der Robotik simulieren Ingenieure die Bewegung von Robotern mithilfe von Inertialsystemen in virtuellen Umgebungen. Indem sie Reibung oder externe Störungen außer Acht lassen, können sie Algorithmen zur Wegplanung und Steuerung genau modellieren und optimieren.
Einschränkungen und Korrekturen
Obwohl echte Inertialsysteme auf der Erde aufgrund ihrer Rotation und Schwerkraft nicht existieren, verwenden Wissenschaftler für praktische Zwecke pseudo-inertiale Systeme. Sie wenden Korrekturen unter Verwendung von Referenzdaten (z. B. INS/GNSS oder Sternsensoren) an, um die Genauigkeit bei Langzeitmessungen zu gewährleisten.
Inertiale Referenzsysteme sind grundlegend für das Verständnis und die Vorhersage von Bewegung. Durch die Annahme einer stabilen, kräftefreien Umgebung können Ingenieure zuverlässige Navigationssysteme, Flugrouten und Robotersteuerungen für eine Vielzahl fortschrittlicher Anwendungen entwickeln.
