
Система координат NED (North-East-Down) є широко використовуваною системою відліку для навігації та інерційних вимірювань.
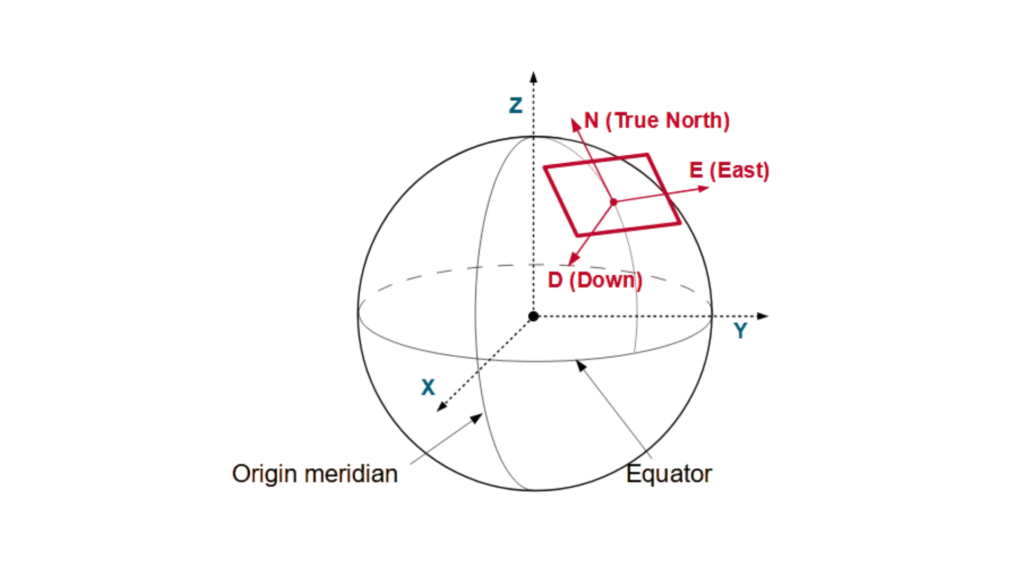
Система координат North-East-Down (NED) слугує локальною системою відліку, яка визначається її координатами ECEF. Зазвичай вона залишається прив’язаною до транспортного засобу або платформи та рухається разом із корпусом. Ця система розміщує осі Північ та Схід у площині, дотичній до поверхні Землі у її поточному місці розташування, на основі еліпсоїдної моделі WGS84.
Вона складається з трьох ортогональних осей: вісь Північ вказує на істинну північ, вісь Вниз простягається у напрямку до надр Землі (протилежно до місцевого напрямку Вгору), а вісь Схід завершує правосторонню систему, вказуючи на схід (перпендикулярно до Півночі).
Аналогічно, до транспортного засобу або платформи може бути локально прив’язана система координат «Схід-Північ-Вгору» (ENU), яка рухається разом із системою. На відміну від системи координат NED, система ENU орієнтує свої осі інакше: північна вісь, як і раніше, вказує на істинний північ, але вертикальна вісь віддаляється від центру Землі, тоді як східна вісь зберігає правосторонню орієнтацію системи, вказуючи на схід.
Ця правостороння система координат спрощує розрахунки для літаків, морських суден та автономних транспортних засобів завдяки узгодженню з природними напрямками руху.
Використання програм NED
Дрон використовує систему автопілота для розрахунку своєї траєкторії в системі координат NED. Коли дрон летить на північ, його значення координати «Північ» збільшується. І навпаки, коли дрон піднімається вгору, значення його координати «Вниз» зменшується, оскільки «Вниз» має додатний знак у напрямку донизу.
І навпаки, INS інерційна навігаційна система) корабля функціонує шляхом відстеження його руху відносно системи координат NED. Коли судно рухається на схід, його східна координата збільшується. І навпаки, коли судно занурюється, його координата «вниз» зростає.
Автомобіль з автопілотом використовує систему координат NED для визначення свого положення. Координата «Північ» автомобіля збільшується, коли він рухається на північ, тоді як нерівності або ухили рельєфу спричиняють зміни у значенні координати «Вниз».
Боєприпаси з точним наведенням використовують систему координат NED для коригування своєї траєкторії. Коли ракета спускається до своєї цілі, координата «Вниз» збільшується, забезпечуючи точне наведення.
Автономні підводні апарати (AUV) використовують систему координат NED для навігації. Коли AUV рухається в північно-східному напрямку, координати «Північ» і «Схід» збільшуються, тоді як зміни глибини впливають на координату «Вниз».
Система NED була розроблена для узгодження рухів із природною орієнтацією Землі, що спрощує навігацію. Ця система використовується інженерами, пілотами та вченими для підвищення точності в системах позиціонування, наведення та керування.
