
Układ współrzędnych NED (North-East-Down) służy jako szeroko stosowany system odniesienia dla nawigacji i pomiarów inercyjnych.
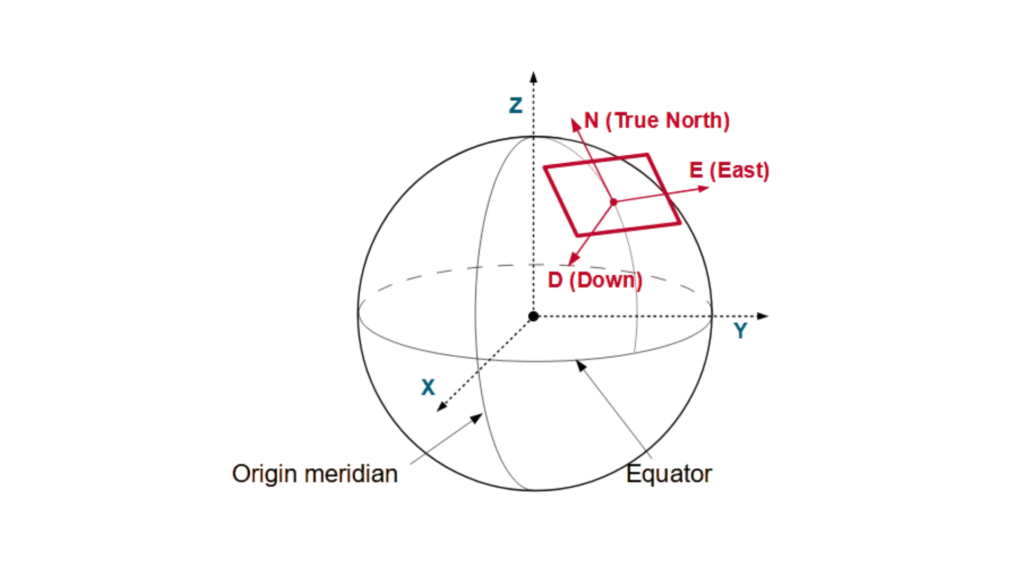
Układ North-East-Down (NED) służy jako lokalny układ odniesienia, zdefiniowany przez jego współrzędne ECEF. Zazwyczaj pozostaje on przymocowany do pojazdu lub platformy i porusza się wraz z układem ciała. Układ ten umieszcza osie północną i wschodnią w płaszczyźnie stycznej do powierzchni Ziemi w jej aktualnej lokalizacji, w oparciu o model elipsoidy WGS84.
Składa się z trzech ortogonalnych osi: oś północna wskazuje biegun północny geograficzny, oś dolna rozciąga się w kierunku wnętrza Ziemi (przeciwnie do lokalnego kierunku górnego), a oś wschodnia uzupełnia prawoskrętny układ, wskazując na wschód (prostopadle do północy).
Podobnie, pojazd lub platforma może mieć lokalnie przypisany układ East-North-Up (ENU), poruszający się wraz z systemem. W przeciwieństwie do układu NED, układ ENU orientuje swoje osie inaczej: oś North nadal wskazuje na północ geograficzną, ale oś Up rozciąga się od wnętrza Ziemi, podczas gdy oś East utrzymuje wyrównanie układu prawoskrętnego, wskazując na wschód.
Ten prawoskrętny układ współrzędnych upraszcza obliczenia dla statków powietrznych, morskich i pojazdów autonomicznych, poprzez wyrównanie z naturalnymi kierunkami ruchu.
Aplikacje wykorzystujące układ NED
Dron polega na systemie autopilota, aby obliczyć swoją trajektorię w ramach układu współrzędnych NED. Kiedy dron leci na północ, jego pozycja wzrasta w kierunku północnym. I odwrotnie, gdy dron wznosi się, wartość jego współrzędnej Down maleje, biorąc pod uwagę, że Down jest dodatni w dół.
Z kolei INS (Inercyjny System Nawigacyjny) statku działa poprzez śledzenie jego ruchu względem ramy NED. Gdy statek porusza się na wschód, jego współrzędna East wzrasta. I odwrotnie, gdy statek nurkuje, jego współrzędna Down wzrasta.
A samochód autonomiczny wykorzystuje ramę NED do ustalenia swojej pozycji. Współrzędna North pojazdu wzrasta, gdy porusza się on na północ, podczas gdy wyboje lub zagłębienia w terenie powodują zmiany w wartości Down.
Amunicja precyzyjnego rażenia polega na ramie NED, aby dostosować swoją trajektorię. Gdy pocisk opada w kierunku celu, współrzędna Down wzrasta, zapewniając dokładne celowanie.
AUV (Autonomiczne Pojazdy Podwodne) wykorzystują ramę NED do nawigacji. Kiedy AUV porusza się w kierunku północno-wschodnim, obie współrzędne North i East wzrastają, podczas gdy zmiany głębokości wpływają na współrzędną Down.
System NED został zaprojektowany w celu dopasowania ruchów do naturalnej orientacji Ziemi, co upraszcza nawigację. System ten jest wykorzystywany przez inżynierów, pilotów i naukowców w celu zwiększenia precyzji w aplikacjach pozycjonowania, naprowadzania i sterowania.
