
Система координат датчика або система координат корпусу — це локальна система відліку, яка рухається разом із датчиком або платформою, такою як дрон, транспортний засіб, робот або ракета. Вона визначає орієнтацію та рух відносно фізичної конструкції датчика. Інженери використовують систему координат корпусу для вираження таких величин, як прискорення, кутова швидкість та швидкість руху, безпосередньо з точки зору датчика.
Система координат датчика (корпусу) — яку часто називають системою координат корпусу або системою координат транспортного засобу — слугує системою відліку, закріпленою на рухомій платформі, такій як дрон, автомобіль, ракета або підводний апарат. Інженери використовують цю систему для опису руху та орієнтації платформи відносно самої себе, що робить її незамінною для навігації, керування та об’єднання даних датчиків.
У більшості випадків користувачі встановлюють такі датчики, як інерційні вимірювальні блоки (IMU), GNSS або AHRS , безпосередньо на транспортний засіб. Ці датчики передають дані у своїй власній системі координат, яка зазвичай збігається з системою координат корпусу. Вона складається з трьох ортогональних осей, що утворюють праворучну систему координат:
- Вісь X спрямована вперед, у напрямку руху або у бік датчика.
- Вісь Y спрямована вправо (на правий борт у морських або авіаційних системах).
- Ось Z спрямована вниз або вниз відносно основи датчика, залежно від умов використання.
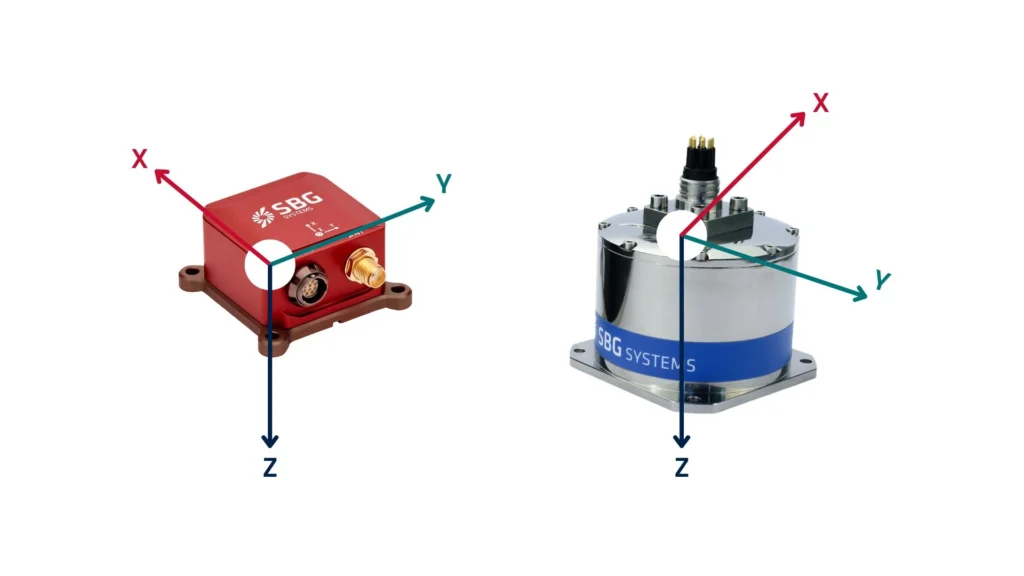
Така фіксована орієнтація дозволяє системі вимірювати, як вона рухається або обертається у власному просторі, а не відносно Землі.
Приклади застосування каркасів
IMU відповідає за вимірювання прискорення та обертання у власній системі відліку. Коли дрон нахиляється вперед, він фіксує кутову швидкість навколо осі Y. Система передає ці дані до контролера польоту, що дозволяє дрону стабілізуватися та точно виконувати команди польоту. Наприклад, система автопілота дрона використовує дані датчиків у системі відліку корпусу для стабілізації польоту та виконання маневрів, таких як поворот, pitch та roll. Система безпосередньо інтерпретує рухи, виражаючи їх як поступальні, поперечні та вертикальні рухи відносно власної системи координат дрона.
З іншого боку, безпілотний автомобіль виявляє своє лінійне прискорення вздовж осей X (вперед), Y (убік) та Z (вертикально) у своїй системі координат. Ця здатність дозволяє транспортному засобу регулювати швидкість, підтримувати контроль над смугою руху та реагувати на зміни рельєфу. Ця система координат полегшує інтерпретацію даних лідара, радара та інерціальної системи. Система керування автомобілем використовує ці показники для прийняття рішень щодо руху в режимі реального часу на основі власної орієнтації.
Навігаційна система ракети використовує систему координат корпусу для відстеження орієнтації. Під час маневрування бортовий датчик виявляє швидкість обертання та прискорення по осях, зафіксованих щодо корпусу, що дозволяє здійснювати точні корекції курсу. Вбудована навігаційна система ракети використовує систему координат корпусу для відстеження прискорення та кутової швидкості, що дозволяє їй коригувати траєкторію та орієнтацію на основі поточного положення та орієнтації системи координат.
Роботизована рука використовує систему координат корпусу для розрахунку рухів суглобів та положень кінцевого виконавчого механізму. Положення та орієнтація кожного двигуна вимірюються в цій локальній системі координат для забезпечення керування в режимі реального часу.
Проблеми з вирівнюванням датчиків
У практичному застосуванні датчики не завжди ідеально співпадають з системою координат кузова. Щоб вирішити цю проблему, інженери часто застосовують корекцію обертання системи координат, яка приводить систему координат датчика у відповідність до системи координат кузова транспортного засобу. Це забезпечує точність вимірювань для розрахунків, пов’язаних із положенням, швидкістю та орієнтацією. Це є фундаментальним для будь-якої системи, яка рухається та сприймає навколишнє середовище. Це відіграє важливу роль у навігації, управлінні та стабілізації в режимі реального часу, що робить це необхідним у системах аерокосмічної, оборонної, автомобільної та робототехнічної галузей.
Розкажіть нам про свій проект