
Układ współrzędnych czujnika lub układ związany z obiektem jest lokalnym układem odniesienia, który porusza się wraz z czujnikiem lub platformą, taką jak dron, pojazd, robot lub pocisk. Definiuje orientację i ruch względem fizycznej struktury czujnika. Inżynierowie używają układu związanego z obiektem do wyrażania pomiarów, takich jak przyspieszenie, prędkość kątowa i prędkość, bezpośrednio z perspektywy czujnika.
Układ współrzędnych czujnika (obiektu)—często nazywany układem związanym z obiektem lub układem pojazdu—służy jako układ odniesienia przymocowany do ruchomej platformy, takiej jak dron, samochód, pocisk lub pojazd podwodny. Inżynierowie używają tego układu do opisywania ruchu i orientacji platformy względem niej samej, co czyni go niezbędnym do nawigacji, sterowania i fuzji czujników.
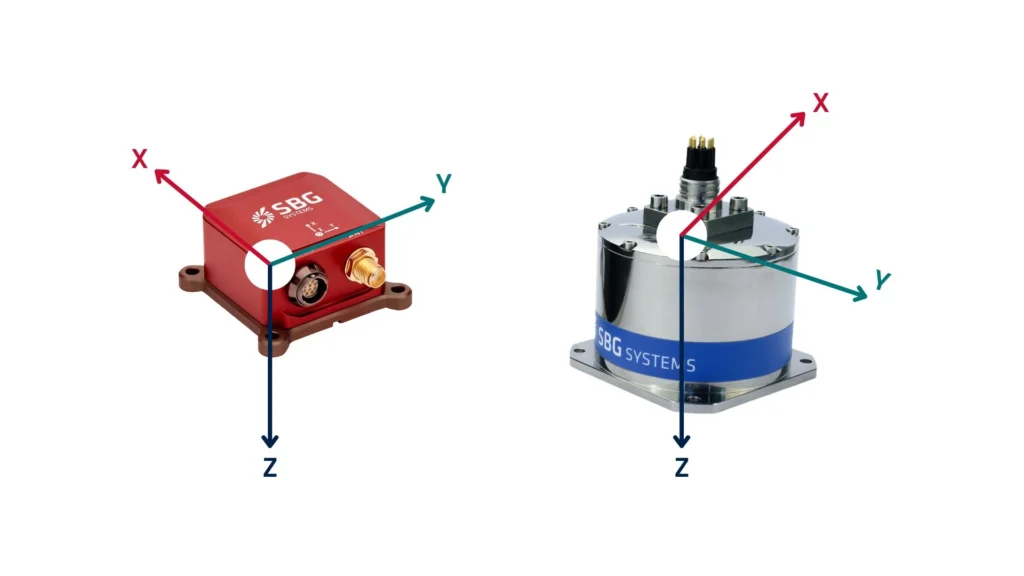
W większości zastosowań użytkownicy montują czujniki, takie jak IMU, odbiorniki GNSS lub jednostki AHRS, bezpośrednio na pojeździe. Czujniki te raportują dane w swoim własnym układzie współrzędnych, który zwykle pokrywa się z układem związanym z obiektem. Składa się on z trzech ortogonalnych osi tworzących prawoskrętny układ współrzędnych:
- Oś X jest skierowana do przodu, zgodnie z kierunkiem ruchu lub w kierunku przodu sensora.
- Oś Y jest skierowana w prawo (na prawą burtę w systemach morskich lub lotniczych).
- Oś Z jest skierowana w dół lub w dół względem podstawy czujnika, w zależności od zastosowania.
Ta stała orientacja umożliwia systemowi pomiar ruchu lub obrotu we własnej przestrzeni, a nie względem Ziemi.
Przykłady zastosowań w układzie współrzędnych związanym z platformą
IMU drona odpowiada za pomiar przyspieszenia i rotacji w jego własnym układzie odniesienia. Kiedy dron przechyla się do przodu, wykrywa prędkość kątową wokół osi Y. System przekazuje te dane do kontrolera lotu, umożliwiając dronowi stabilizację i precyzyjne wykonywanie poleceń lotu. Na przykład, system autopilota drona wykorzystuje dane z czujników w układzie odniesienia drona do stabilizacji lotu i wykonywania manewrów, takich jak yaw, pitch i roll. System interpretuje ruchy bezpośrednio, wyrażając je jako ruchy do przodu, na boki i w pionie w odniesieniu do własnego układu odniesienia drona.
Z drugiej strony, samochód autonomiczny wykrywa swoje przyspieszenie liniowe wzdłuż osi X (do przodu), Y (na boki) i Z (w pionie) w swoim układzie odniesienia. Ta zdolność umożliwia pojazdowi dostosowanie prędkości, utrzymanie kontroli pasa ruchu i reagowanie na zmiany terenu. Ten układ współrzędnych ułatwia interpretację danych z lidaru, radaru i danych inercyjnych. System sterowania samochodu wykorzystuje te odczyty do podejmowania decyzji dotyczących jazdy w czasie rzeczywistym w oparciu o jego własną orientację.
System nawigacji pocisku wykorzystuje układ odniesienia do śledzenia orientacji. Podczas manewrowania, pokładowy czujnik wykrywa prędkości obrotowe i przyspieszenie w osiach związanych z korpusem, umożliwiając precyzyjne korekty kursu. Pokładowy system nawigacji pocisku wykorzystuje układ odniesienia do śledzenia przyspieszenia i prędkości kątowej, umożliwiając mu dostosowanie trajektorii i orientacji w oparciu o jego aktualną pozycję i orientację układu współrzędnych.
Ramię robota wykorzystuje układ odniesienia do obliczania ruchów stawów i pozycji efektora końcowego. Pozycja i orientacja każdego silnika są mierzone w tym lokalnym układzie odniesienia, aby zapewnić sterowanie w czasie rzeczywistym.
Problemy z ustawieniem czujników
W praktycznych zastosowaniach czujniki nie zawsze są idealnie ustawione względem układu odniesienia korpusu. Aby to rozwiązać, inżynierowie często wdrażają korekcje rotacji układu odniesienia, które wyrównują układ współrzędnych czujnika z układem odniesienia korpusu pojazdu. Zapewnia to precyzyjne odczyty do obliczeń związanych z pozycją, prędkością i orientacją. Ma to fundamentalne znaczenie dla każdego systemu, który porusza się i odbiera informacje o swoim otoczeniu. Odgrywa istotną rolę w nawigacji, sterowaniu i stabilizacji w czasie rzeczywistym, co czyni go niezbędnym w systemach lotniczych, obronnych, motoryzacyjnych i robotycznych.
Opowiedz nam o swoim projekcie