Ekinox Micro Quanta Micro アーバンナビゲーションの最前線にあり、我々はそれらを車載テストにかけました。
2つの慣性ナビゲーションシステムは、戦術的なMEMSベースのIMU フル機能のRTK GNSSレシーバーを組み合わせ、驚くほどコンパクトな形状で比類のないパフォーマンスを提供します。
この包括的な性能評価記事は、2022年7月に実施された徹底的なテストに基づいており、Quanta Micro商業導入を前にその能力を検証するものである。
センサーは、オープンスカイ、中都市部、都市部の峡谷など、さまざまなGNSS環境で広範囲にテストされました。その結果、一貫して卓越したデータ品質が示されました。
仕様は通常、ウォームアップ段階を経た後の通常の陸上状態のような業界標準のシナリオに基づいていますが、このテストではウォームアップ段階のない困難な都市条件も含まれています。
驚くべきことに、Ekinox Micro Quanta Micro このテストで優れた結果を出し、あらゆる条件下で卓越した性能を発揮しました。
前提条件
このテストレポートを読むには、慣性航法とポスト処理の概念についてある程度の知識が必要です。私たちの知識ベースは、慣性航法の素晴らしい世界への旅立ちをお手伝いします。
略語
- CORS:継続運用基準局
- DUT:被試験デバイス
- EUT:被試験機器
- FOG:光ファイバージャイロスコープ
- GNSS:全地球航法衛星システム(GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National(フランスの公的地理機関)
- IMU:慣性計測ユニット
- INS:慣性航法システム
- LiDAR:光検出と測距
- MEMS:マイクロ電気機械システム
- マージされた:Qinertiaを使用したフォワード+バックワードポストプロセッシング
- PPK:ポスト処理キネマティック
- RGP: Réseau GNSS Permanent (フランス全国CORSネットワーク)
- RMS:二乗平均平方根
- RTK: リアルタイム・キネマティック
- Std: 標準偏差
- SWaP-C:サイズ・重量・パワー・コスト
- TC:タイト・カップリング
- UAV:無人航空機
テスト・ミッションの目的と仕様
ミッションの計画と実行
テストは2022年7月7日にSBG Systems テスト車両で実施された。晴天の下、SBGシステムの施設周辺を115分間走行した:
- オープンスカイ条件下で45分間の連続運用。
- 半密集都市環境下での35分間の連続運転。
- トンネルを含む過酷な都市環境下での35分間の連続運用。

環境の複雑さを考慮すると、衛星の視認性に関して有利な時間帯を選択するようなミッション計画には特に注意が払われていない。
ミッション目標
このミッションは、Quanta Micro Ekinox Micro INS 実際のシナリオでどのような挙動を示すかを実証するために特別に設計されました。これにより、INS その仕様を満たしている(超えている)ことを検証できただけでなく、最も困難なGNSS条件下でもその卓越した性能を実証することができました。
ミッション中、Quanta Microリアルタイム性能を測定するデータを収集し、同じデータセットの後処理(PPK)を行いました。
これにより、自動車環境におけるQuanta Micro INS 性能の全容を把握することができます。また、他のアプリケーション(特定のテストレポートの対象となります)については、それほどではありませんが、
。最適化されたモーションプロファイルを使用することの利点は、自動車と航空機のモーションプロファイルでの処理を比較することで実証されています。
自動車テストのセットアップ
テスト機器
| 名称 | 説明 | HWリビジョン | シリアル番号 | ファームウェアバージョン |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| 代理人による評価 | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
すべてのテストにおいて、設置パラメータ(ミスアライメント、レバーアームなど)は、CAD図面または以前のキャリブレーションから事前に知らされていた。
EUTはどちらもQuanta Micro Quanta Microですが、このテストレポートの内容はEkinox Micro完全に適用できることを覚えておいてください。一連の綿密な内部比較により、この主張が確認されています。
参考軌道
性能誤差の評価に使用した参照ソースは、SBG Systems HorizonFOG ベースの究極性能)、Navsight-S、および EUT とともに車両に搭載された Pegasem 走行距離計からのデータを Qinertia で処理した密結合軌道である。ポスト処理に使用した Qinertia のバージョンは 3.2.881-stable です。
| 名称 | 説明 | 位置精度 | 姿勢の正確さ | ヘディング精度 |
|---|---|---|---|---|
| ナビサイト・ホライズン | FOG ベースのINS | 0.01m (0.01m @ 10s) (0.05m @ 60s) | 0.004° (0.004° @ 10s) (0.005° @ 60s) | 0.008° (0.008° @ 10s) (0.010° @ 60s) |
Navsight-Sに給電する2本のVSP6037L GNSSアンテナはEUTと共有する(テストセットアップ図参照)。
事後データ解析から、後処理されたホライゾン軌道の品質指標(位置と姿勢の標準偏差推定値)により、ホライゾン軌道をEUTに関する基準として使用することが完全に可能になります。
船内に設置された3つのINS 各ポジションは、直接比較できるように共通のポイントに移されている。
基地局
すべてのPPKとRTK操作は、SBGSBG Systems 社の施設の屋上に設置され、フランスのCORSネットワークであるIGN RGPに含まれるSBG'Sステーションという単一の基地を使用して行われた。
SBGSは完全なGNSSコンステレーション・トラッキング(GPS + GLONASS + GALILEO + BEIDOU)を提供します。4つのコンステレーションすべてがリアルタイムのRTKオペレーションに使用されました。
テスト車両
テスト車両はSBG Systems 専用バンで、以下のセットアップ図に示すような当社の標準装備を装着した。

両方のGNSSアンテナ間のベースラインは約2mで、ほとんどの設置パラメータは特に優れた精度で知られている。
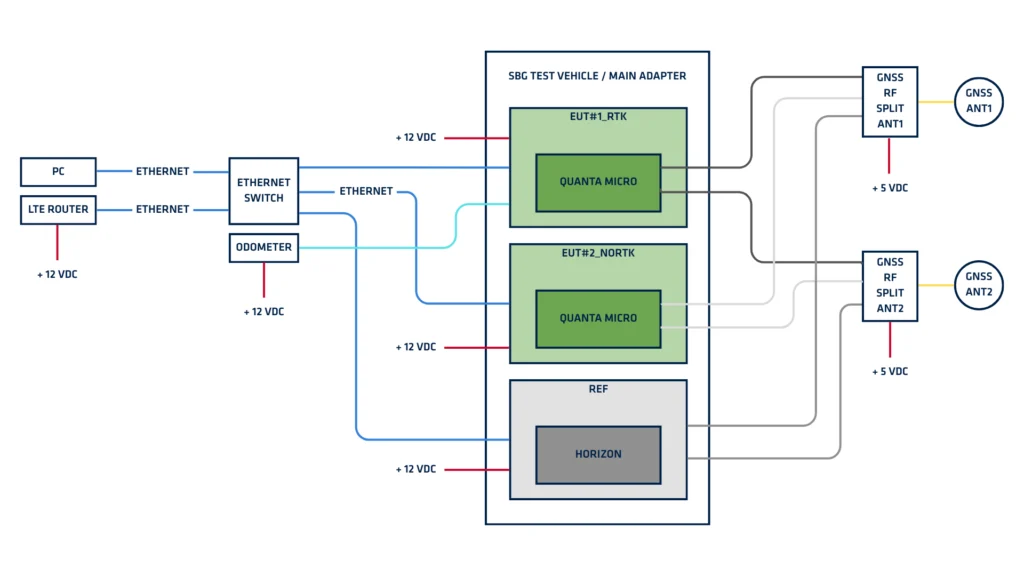
EUT構成
被試験機器(EUT)は、リアルタイム測定用に以下のように構成された:
- EUT1:4つのコンステレーションを持つGNSS、RTKおよび走行距離計の補助。
- EUT2:GNSS、全4星座、RTKなし、走行距離計補助なし。
自動車テストの結果
この選択は、ほとんどの場合、ほとんどの数値にマイナスの影響を与えます。特に、ミッションの最初の5-10分で非常に速く減少し、高い値が標準値とRMSに大きな影響を与える方位誤差については、マイナスの影響を与えます。
さらに、3つのミッション部分(オープンスカイ、中規模、過酷なGNSS環境)すべてを意図的に含めることで、車載プロファイルを最もよく表す、RTKなし、RTK、PPKデュアルアンテナ統計量を計算しました。
これら2つの選択は、値を悲観的に見せています。しかし、これらの数値は、Quanta Micro アライメント段階から(ウォームアップができなくても)すぐに特に優れた性能を発揮してまだ使用可能であることを示しており、また、規定よりもはるかに厳しいテスト環境であっても製品の性能仕様をほぼ満たすことができるQuanta Micro アルゴリズムの堅牢性を証明しています。
リアルタイム・シナリオ
これらのINS リアルタイムで機能し、RTK補正の有無にかかわらず、高周波数で低遅延のナビゲーションソリューションを提供します。以下の表と図は、以下の条件下における両EUTの詳細なリアルタイム結果を示しています。
- 自動車運動プロファイル
- EUT #1(RTK)の走行距離計補助、EUT #2(RTKなし)の走行距離計補助なし
- デュアルアンテナGNSSヘディング入力付き
| EUT#1 (RTK + odo) | EUT#2 (RTKなし、オドなし) | |||
|---|---|---|---|---|
| エラー | 68% | 95% | 68% | 95% |
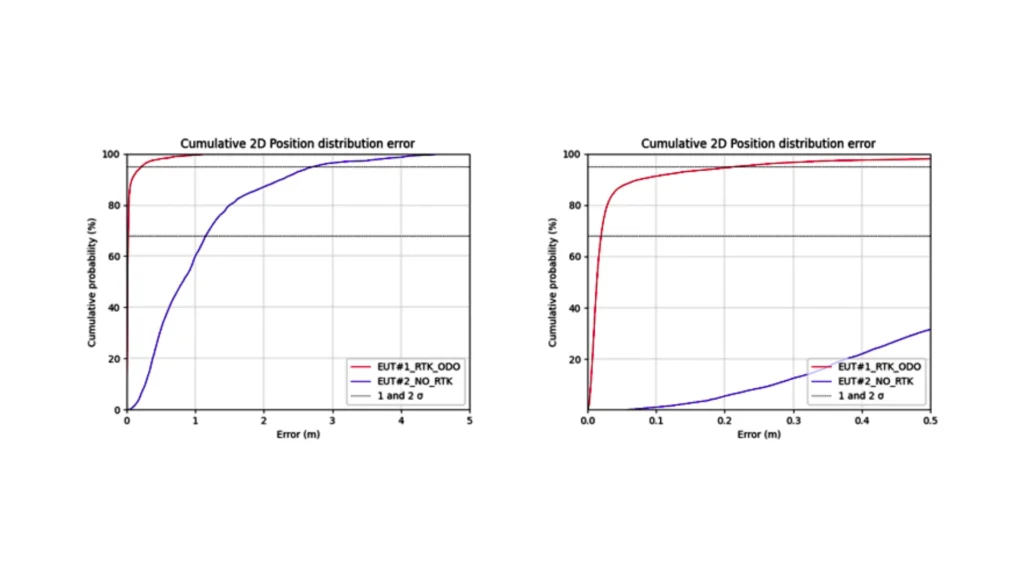
| 2Dポジション | 0.021m | 0.246m | 1.155m | 2.734m |
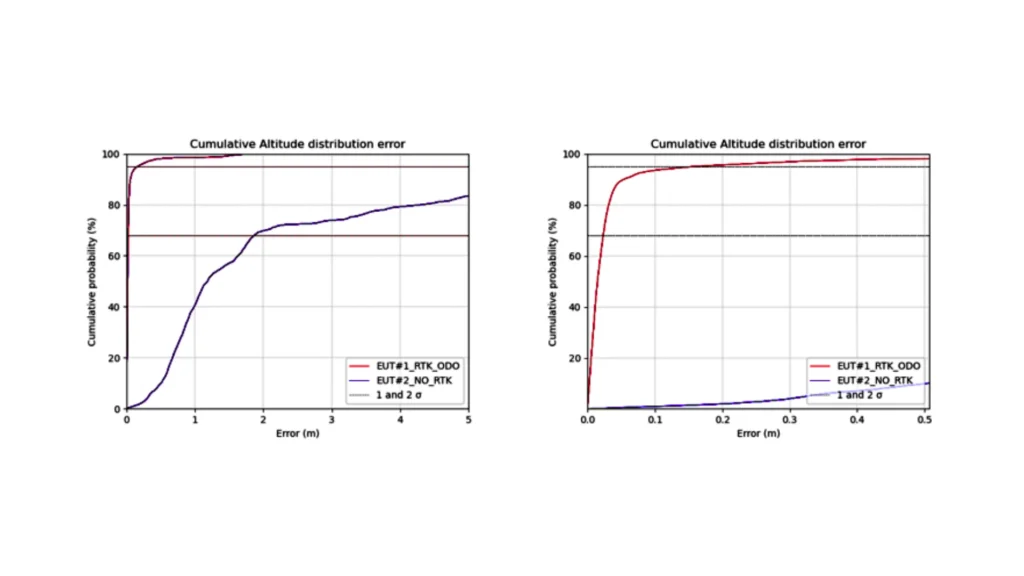
| 縦位置 | 0.023m | 0.157m | 1.865m | 7.329m |
| ロール/ピッチ | 0.011° | 0.026° | 0.015° | 0.035° |
| ヨー | 0.060° | 0.140° | 0.078° | 0.190° |
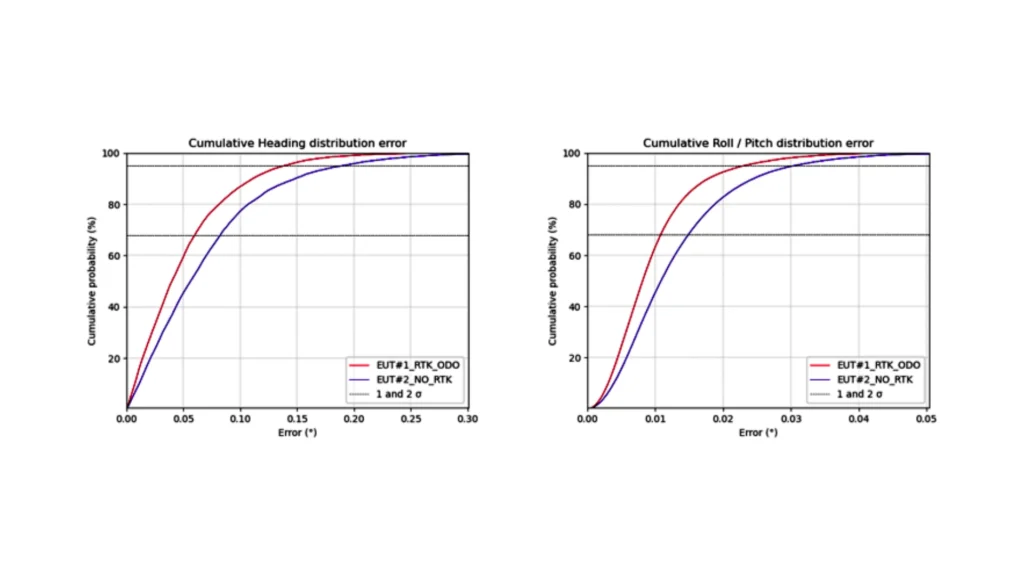
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
加工後のシナリオ
これらのシナリオは、TCマージ(前方+後方)計算モードにおけるQinertiaポスト処理ソフトウェアで達成可能な製品の最終性能を評価し、モーションプロファイルの影響を比較するものである。単一のEUT(EUT#2)に対して表示された結果は、どちらのユニットでもほぼ同じであった。
| TCオートモーティブ・プロファイル (デュアルアンテナ+オド) | TC飛行機プロファイル (シングルアンテナ | |||
|---|---|---|---|---|
| エラー | 68% | 95% | 68% | 95% |
| 2Dポジション | 0.014m | 0.093m | 0.014m | 0.100m |
| 縦位置 | 0.008m | 0.032m | 0.008m | 0.034m |
| ロール/ピッチ | 0.011° | 0.032° | 0.011° | 0.032° |
| ヨー | 0.051° | 0.211° | 0.041° | 0.208° |
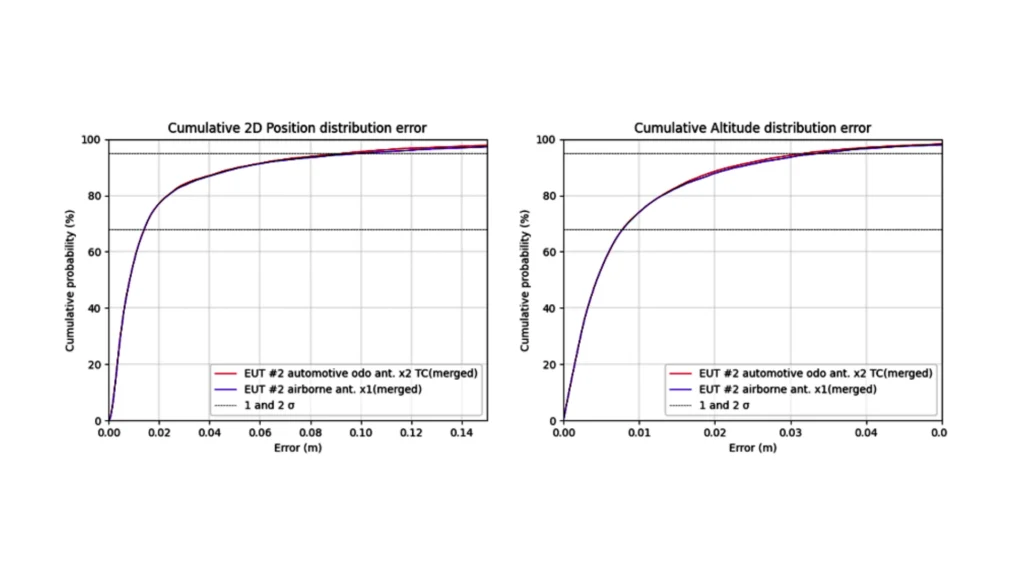
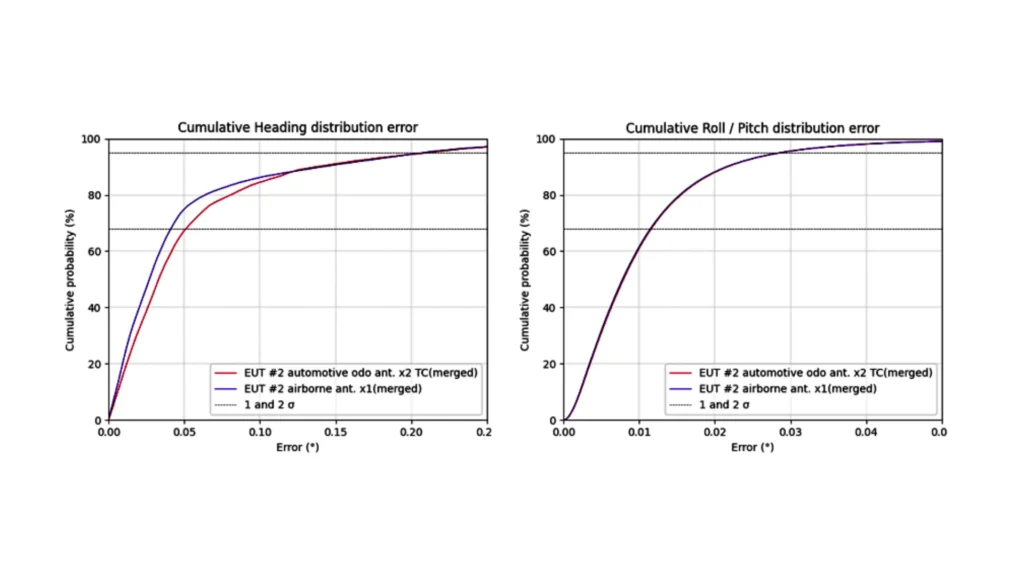
前述の表とプロットは、モーションプロファイルが後処理性能にわずかな影響を与えることを示している。
GNSS環境が非常に困難であったにもかかわらず、製品の挙動は非常に良く、非常に正確な結果が得られました。実時間に関しては、ミッションをオープンスカイと中程度の都市環境に制限することで、製品の仕様以上の結果が得られました。
結論
Ekinox Micro テストとその後のデータ分析 Quanta Microのテストとその後のデータ分析により、その強力な能力、信頼性、精度が明らかになりました。これらのシステムは、シングルアンテナモードでもデュアルアンテナモード(RTK GNSS受信機)でも、厳しい環境下でも非常に優れた性能を発揮します。
Ekinox Micro EkinoxEkinox Micro Quanta Microは、安定した正確な測位と姿勢決定を必要とするリアルタイムアプリケーションに最適です。
さらに、リアルタイム性能が重要でないシナリオ(LiDARマッピング 写真測量など)では、SBG SystemsQinertiaソフトウェアが卓越した後処理を提供し、厳しいGNSS環境でもセンチメートルレベルの精度まで性能を向上させます。このため、INS Qinertiaの組み合わせは、直接ジオリファレンスやSLAM技術に最適な選択となります。
この研究は、Quanta Micro Ekinox Micro 、サイズ、重量、性能に厳しい考慮が必要なものを含め、様々な用途に適していることを決定的に立証しています。
- OEM ソリューションとして設計されたQuanta Micro は、UAVマッピングおよび体積ナビゲーション アプリケーションにシームレスに統合されます。
- ユーザーフレンドリーなデザインと堅牢性(MIL-STD-461およびMIL-STD-1275に準拠)、 Ekinox Microは軽量のサーベイ アプリケーションに適していますが、堅牢性が重要なナビゲーションアプリケーションで最高の性能を発揮します。
SBG Systems 、より柔軟なSWaP-Cパラメータと幅広い条件下での高精度を要求されるマッピング 作業向けに、Quanta Plus、Quanta Extra、Ekinox、Apogee、Navsight製品を提供しています。Qinertiaの後処理機能とも完全な互換性を持つこれらの代替製品は、より高い性能レベルを提供し、最高の性能を必要とするアプリケーションの優れた選択肢となります。
PDFレポートをダウンロードする