Les robots raflent des prix grâce à nos capteurs
« Les produits de SBG Systems sont de premier ordre, offrant toute la précision dont nous avons besoin. Il est important de noter que la documentation et le support sont excellents, ce qui est particulièrement bénéfique pour les étudiants comme nous. Un grand merci à M. Jérémy Colombel et à M. Nicolas Michel ici à Singapour qui nous ont été particulièrement utiles. » | Isabella Lu, ingénieure électricienne, équipe Bumblebee

L'équipe Bumblebee est un groupe d'étudiants innovants issus du College of Design and Engineering (CDE), de la School of Computing (SoC) et de la NUS Business School de l'Université nationale de Singapour(NUS). Leur vision est de construire les systèmes autonomes du futur.
Leur objectif est de concevoir et de construire des véhicules maritimes autonomes capables de naviguer à la fois sous l'eau et à la surface de l'eau.
L'équipe est composée d'étudiants venant d'horizons divers, notamment en mécanique, en informatique, en génie électrique, en sciences informatiques et en commerce.

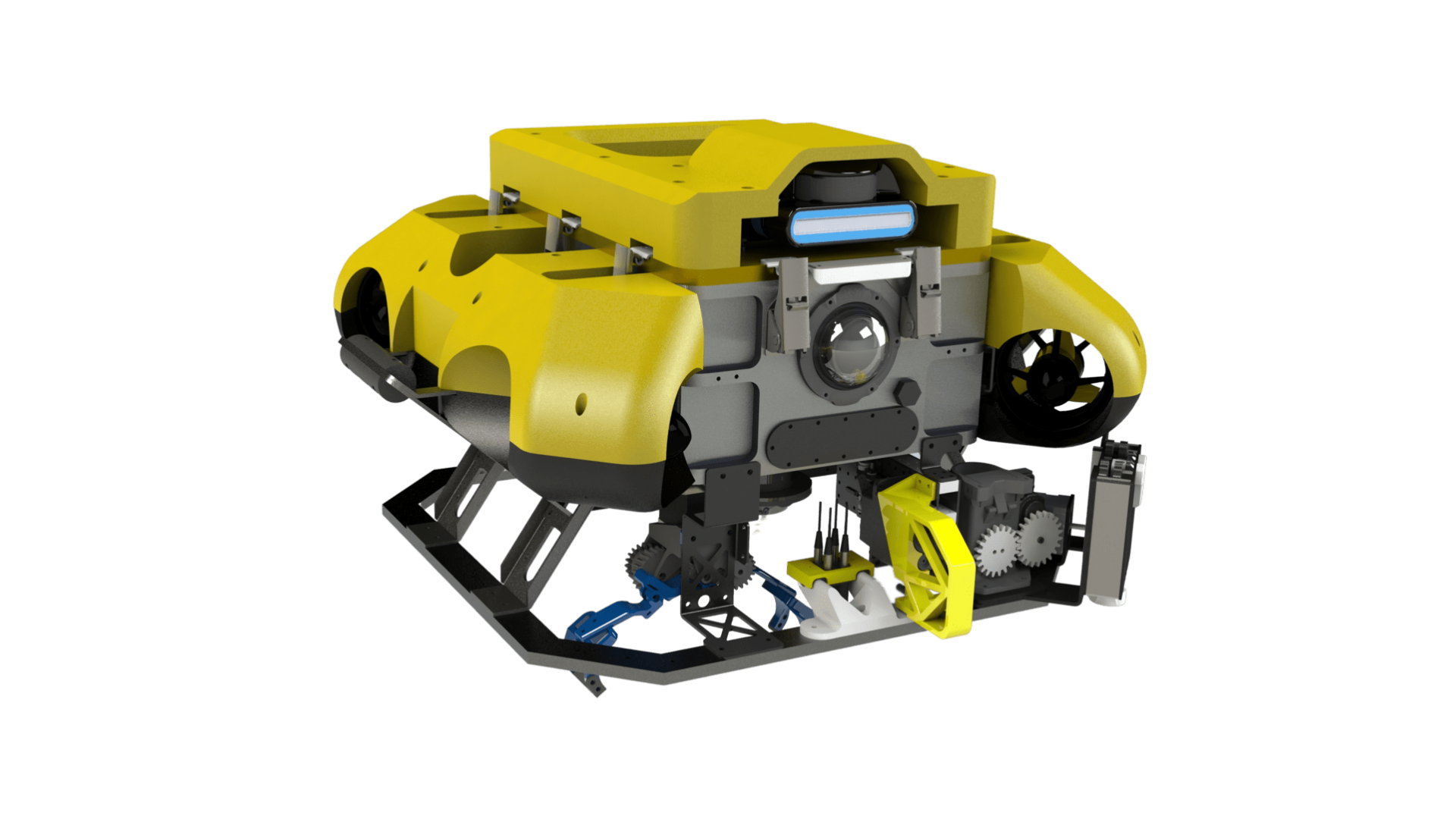
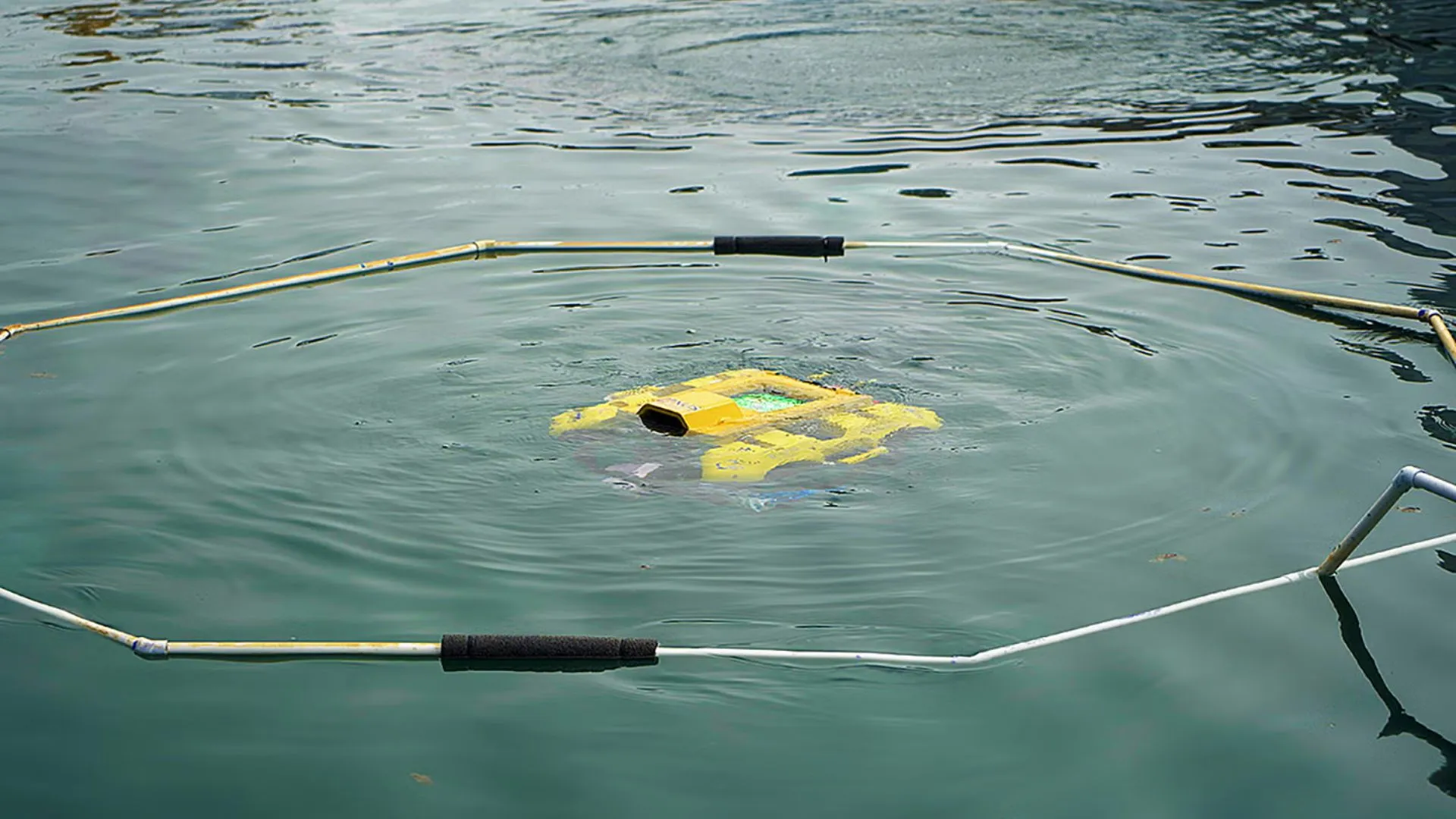
Le système actuel de l'équipe Bumblebeecomprend trois véhicules autonomes : BBAUV4.1(Autonomous Underwater Vehicle), ASV 3.0 (Autonomous Surface Vessel) et Jellyfish (Unmanned Aerial Vehicle).
Ces véhicules ont remporté des succès remarquables lors de compétitions internationales, telles que RoboSub Challenge et RobotX.
Un besoin d'INS précis et robustes
L'équipe Bumblebee avait besoin d'un IMU haute précision, robuste et à faible latence avec une unité GPS pour obtenir une localisation et une navigation précises dans un environnement maritime. Ses principales exigences étaient les suivantes
- Précision Roll & Pitch inférieure à 1 degré.
- Compatibilité avec Ubuntu, de préférence avec un pilote ROS ou un pilote tiers facilement disponible.
- Blindage magnétique intégré adéquat pour éviter les interférences.
- Connecteurs robustes et standard.
- Prise en charge du positionnement RTK (Real-Time Kinematic).
Ces capteurs seraient montés sur une plateforme WAM-V modifiée utilisée pour des missions autonomes dans l'environnement maritime, permettant la navigation, l'évitement d'obstacles, la détection d'objets et la planification de missions.
Pourquoi l'équipe Bumblebee a-t-elle choisi SBG Systems?
L'équipe Bumblebee a procédé à une évaluation approfondie de différents fournisseurs d'IMU . Elle a décidé de s'associer à SBG Systems en raison de plusieurs facteurs clés :
1 – Boîtier résistant aux intempéries : Les capteurs de SBG Systems étaient livrés avec des boîtiers résistants aux intempéries IP-68, ce qui les rend adaptés aux applications maritimes.
2 – Crédibilité du fabricant : La réputation de SBG Systems dans le domaine des capteurs inertiels et des systèmes de navigation a joué un rôle important dans leur décision.
3 – Avancées techniques : Le capteur Ellipse-D de SBG Systems offrait des fonctionnalités avancées, notamment un GPS à double antenne et des données de cap améliorées, réduisant ainsi le besoin d'étalonnage du magnétomètre.
4 – Assistance d'experts : L'équipe Bumblebee a reçu de précieux conseils techniques de la part d'experts qui étaient constamment disponibles pour les aider.
Orientation précise et support solide
Après avoir intégré l'Ellipse-D de SBG Systems dans leurs systèmes, l'équipe Bumblebee a constaté des améliorations significatives :
- GNSS à double antenne : L'ajout d'un GNSS à double antenne a éliminé l'influence des interférences magnétiques, fournissant des données d'orientation précises et des relevés de lacet absolus, essentiels pour la navigation au-dessus des plans d'eau.
- Étalonnage du gyroscope : L'équipe a reçu le soutien des ingénieurs de SBG Systems pour résoudre les problèmes de biais du gyroscope et garantir des performances stables.
Une adéquation parfaite
L'Ellipse-D correspondait parfaitement aux contraintes d'application ASV de l'équipe Bumblebee, fournissant la précision, la robustesse et la facilité d'intégration requises.
L'équipe Bumblebee a apprécié plusieurs avantages liés à l'utilisation des produits de SBG Systems
✦ Assistance rapide : L'équipe d'assistance a fourni une aide rapide en cas de besoin.
✦ Documentation détaillée : Des fiches techniques et des guides d'application complets étaient disponibles, facilitant l'intégration et le dépannage.
✦ Facilité d'intégration : Les capteurs de SBG Systemsont été conçus avec des trous de montage et une connectivité USB prête à l'emploi, ce qui simplifie l'intégration.
✦ Prix réduits : Le prix avantageux a été bénéfique pour un projet mené par des étudiants.
✦ Boîtier étanche et durable : Les boîtiers résistants aux intempéries des capteurs de SBG Systemsont contribué à leur durabilité dans les environnements maritimes.
Trois choses que l'équipe Bumblebee aime chez nous
1 – Sincérité et engagement : SBG Systems a fait preuve d'un engagement remarquable à soutenir l'équipe Bumblebee au-delà d'une relation typique fournisseur-client, en allant plus loin pour contribuer au succès de l'équipe.
2 – Passion et dévouement des ingénieurs : La passion et les connaissances des ingénieurs de support de SBG Systems ont trouvé un écho dans l'amour de l'équipe Bumblebee pour la robotique et la technologie.
3 – Documentation et assistance complètes : La documentation et l'assistance complètes, ainsi que l'aide de l'équipe de vente, ont facilité le processus d'intégration pour l'équipe étudiante.
Bumblebee a récemment participé au Maritime Robosub Challenge 2023 qui s'est tenu à l'US Naval Transdec facility de San Diego, en Californie, avec un total de 35 équipes de 5 pays. Ils ont été sacrés champions, ainsi que pour les autres réalisations énumérées ci-dessous.
Prix RoboSub 2023 :
- 1ère place au Autonomy Challenge
- 1ère place à l'évaluation du système
- 1ère place au Website
- Documentation de conception, 2e place
SBG Systems adresse ses meilleurs vœux à l'équipe Bumblebee pour tous ses projets futurs.
Ellipse-D
L'Ellipse-D est un système de navigation inertielle intégrant une double antenne et une double fréquence RTK GNSS compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée Odomètre avec Pulse ou CAN OBDII pour améliorer la précision de la navigation.

Demander un devis pour Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous y trouverez les réponses aux questions les plus courantes concernant les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Qu'est-ce que le système de guidage inertiel d'un USV?
Un système de guidage inertiel pour un Unmanned Surface Vehicle (USV) est essentiel pour une navigation et un contrôle précis, en particulier lorsque le GNSS n'est pas disponible. Les capteurs inertiels suivent le mouvement et l'orientation, permettant une navigation efficace dans des environnements difficiles.
Les systèmes de navigation inertielle (INS) intègrent les données de l'IMU avec d'autres systèmes, tels que le GNSS ou les Doppler Velocity Logs, pour une précision accrue. Ils utilisent également des algorithmes de navigation, tels que le filtrage de Kalman, pour calculer la position et la vitesse.
Les capteurs inertiels prennent en charge le fonctionnement autonome, fournissant des données précises de cap et de position pour diverses applications. Ils assurent un fonctionnement efficace dans des conditions de déni de GNSS et permettent des ajustements en temps réel pour une maniabilité améliorée.
Quelle est la différence entre IMU et INS?
La différence entre une centrale de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU (centrale de mesure inertielle) fournit des données brutes sur l'accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas la position ni les données de navigation. L'IMU est spécifiquement conçue pour relayer des données essentielles sur le mouvement et l'orientation pour un traitement externe afin de déterminer la position ou la vitesse.
D'autre part, un INS (système de navigation inertielle) combine les données IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation comme le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS fournit des données de navigation en temps réel, y compris la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes comme le GNSS.
Ce système de navigation est généralement utilisé dans les applications qui nécessitent des solutions de navigation complètes, en particulier dans les environnements où le GNSS est inaccessible, tels que les UAV militaires, les navires et les sous-marins.