Cementerios militares estadounidenses digitalizados para una misión solemne
"Elegimos Ellipse-D por su solución GNSS e Inercial todo en uno empaquetada en un dispositivo compacto y de bajo consumo". | Matthew R. Staley, Científico de Ingeniería Militar y Apoyo Topográfico en el Centro Geoespacial del Ejército de EE.UU.
El Centro Geoespacial del Ejército (AGC) ha aplicado la innovación para ayudar a los visitantes de los cementerios militares estadounidenses a encontrar a sus seres queridos.
Se integraron los métodos tradicionales de levantamiento por GPS y la digitalización cartográfica en 3D y se montaron en una mochila especialmente construida para la parte de recogida de este proyecto.
Una interfaz web que actúa como front-end de los datos recogidos proporciona una interfaz sencilla para que los visitantes encuentren a sus familiares y accedan a la información ampliada almacenada en la base de datos del SIG.
Un proyecto piloto para una misión solemne
Para encontrar una lápida determinada en un cementerio nacional estadounidense, los administradores suelen tener que llevar mucho tiempo revisando los registros.
Para ayudar a los visitantes a encontrar fácilmente a sus seres queridos, el Centro Geoespacial del Ejército (AGC), en colaboración con el Cementerio Nacional de Arlington (ANC), ha completado un proyecto piloto que incluye los cementerios de Corozal (Panamá) y Normandía (Francia), que, en conjunto, cuentan con más de 15.000 tumbas.
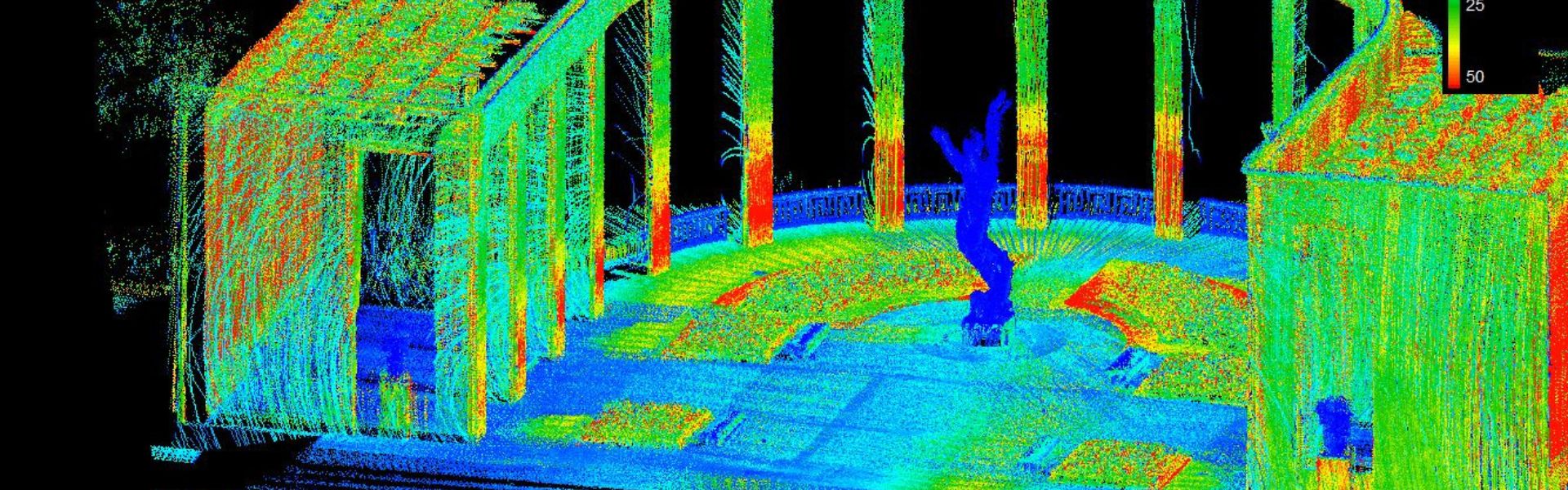
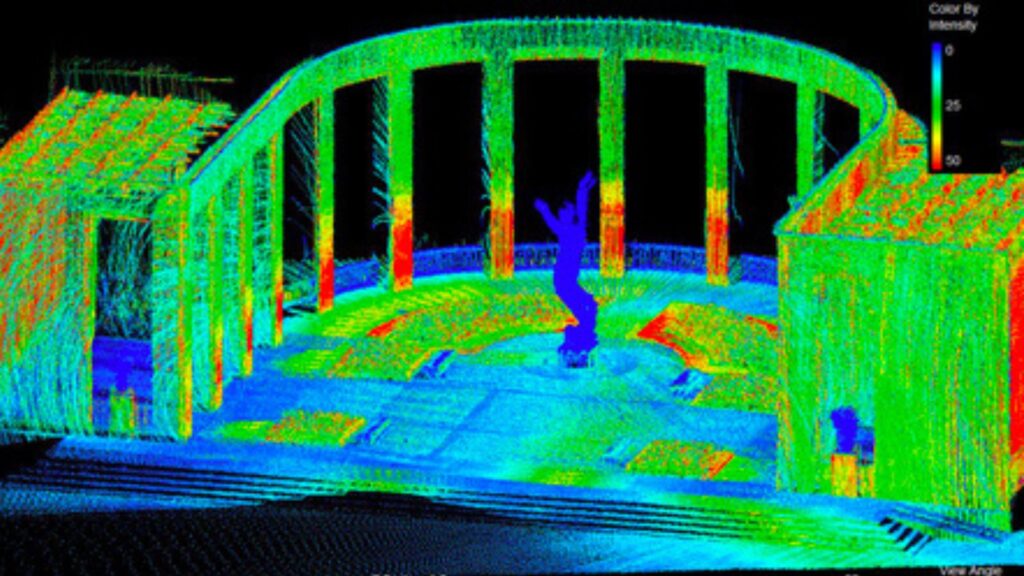
Este enorme proyecto combina métodos topográficos tradicionales y tecnologías modernas para crear modelos virtuales de ambos cementerios.
Los modelos incluyen no sólo el terreno subyacente y las coordenadas GPS de cada lápida o monumento conmemorativo, sino también elementos como carreteras, aceras, árboles, bordillos, cunetas, monumentos y muchas otras estructuras artificiales con una precisión estimada de 10 cm.
Las fotografías geolocalizadas del anverso y reverso de cada lápida para ayudar a su identificación completaron la solución de recopilación.
Los datos recopilados se procesaron e integraron en el ordenador portátil ENFIRE. Gracias a estas innovaciones, los visitantes pueden acceder a los datos del cementerio, buscar a sus seres queridos o encontrar tumbas históricamente significativas utilizando los quioscos de las instalaciones en las que funciona el programa ANC Explorer.
Los visitantes virtuales disponen de idénticas funcionalidades utilizando el programa en su ordenador personal o dispositivo móvil.
Método de cartografía móvil con mochila
Para cartografiar los cementerios en su totalidad con el máximo detalle, Matthew R. Staley, Científico de Ingeniería Militar y Apoyo a la Topografía del Centro Geoespacial del Ejército de Estados Unidos, desarrolló una solución de cartografía móvil basada en mochilas.
El empleo del equipo minimiza los costes al disminuir los tiempos de recogida y proporcionar datos en formatos fáciles de gestionar. Aprovecha las herramientas utilizadas por los Servicios de Topografía Militar de EE.UU. denominadas ENFIRE y GPS-S.
"Acoplé un LiDAR de Velodyne con el sistema de navegación inercial (INS)Ellipse-D con GPS RTK integrado de SBG Systems", explica Matthew R. Staley.
Eligió la Ellipse-D por su solución GNSS e inercial "todo en uno" empaquetada en un dispositivo compacto y de bajo consumo.
El INS se utiliza para la compensación del movimiento y para la georreferenciación de cloud puntos. Para lograr la máxima precisión se instaló en el cementerio una estación base cinemática en tiempo real (RTK). Se utilizó el software Hypack para gestionar la cloud de puntos generada.
Ajuste de la declinación magnética
Uno de los retos era la calibración del magnetómetro, que se ve afectada por el contenido de hierro del lugar. Los cambios en la declinación magnética dependen de la ubicación, por lo que el envío de la mochila de EE.UU. a Francia modificó la declinación magnética.
La Agencia Nacional Oceanográfica y Atmosférica de EE.UU. (NOAA) actualiza un mapa global del campo magnético de la Tierra cada 5 años.
Este mapa se puede utilizar, dada una ubicación y fecha específicas, para determinar la declinación magnética en ese lugar específico.
SBG Systems incorpora este mapa en sus sistemas de navegación inercial, lo que permite el rumbo (heading) Norte verdadero automático rumbo (heading) mientras se utilizan magnetómetros.
Topografía alrededor de los árboles
Otro reto fue la prospección cerca de ciertos tipos de árboles que afectan en gran medida a la recepción por satélite. El Sr. Staley modificó el procedimiento de recogida de datos para compensar este problema y sigue investigando formas de mitigar aún más el efecto de la vegetación sobre la recepción.
Además, se investigará la posibilidad de reducir el alcance del LiDAR para obtener una mayor precisión (+/- 5 cm en total) como forma de mitigar los artefactos de guiñada (raw) ).
"Pronto probaré el software de postprocesamiento Qinertia de SBG, podría ayudar a mantener una precisión robusta en todas las condiciones", añade el ingeniero militar estadounidense.
El software de postprocesamiento cinemático (PPK), como Qinertia, da acceso a correcciones RTK fuera de línea y mejora el rendimiento de los sistemas de navegación inercial mediante el postprocesamiento de datos inerciales con observables GNSS sin procesar utilizando un cálculo denominado fusión hacia delante y hacia atrás (Forward-Backward-Merge).
El software Qinertia, de reciente aparición, ha sido diseñado para ser intuitivo y fácil de usar y ha sido caracterizado de forma independiente como el software de postprocesamiento más rápido del mercado.
¿Y ahora qué?
La misión principal era capturar datos relacionados con los enterramientos y confirmar la aplicabilidad de los conjuntos de herramientas ENFIRE, GPS-S y LiDAR al funcionamiento y la gestión del Cementerio Nacional de Arlington.
La capacidad para auditar los terrenos, actualizar los registros, realizar evaluaciones de construcción y mantenimiento de los terrenos a partir de los datos LiDAR recogidos y desarrollar planes estratégicos que apoyen una mayor eficiencia en sus procesos de negocio se hizo realidad.
Una vez concluida la fase piloto, el Centro Geoespacial del Ejército está colaborando estrechamente con el Cementerio Nacional de Arlington y la Comisión de Monumentos de Batalla de Estados Unidos para evaluar los resultados y determinar una estrategia para futuras mejoras e innovaciones.
Los resultados iniciales demostraron (en comparación con esfuerzos anteriores) que los costes se redujeron al mínimo y se obtuvo un excelente rendimiento general de la inversión por parte de múltiples comunidades.


Ellipse-D
Ellipse-D es un sistema de navegación inercial que integra un GNSS RTK de doble antena y doble frecuencia compatible con nuestro software de postprocesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada de Odómetro con pulso o CAN OBDII para mejorar la precisión del punto muerto.

Pida presupuesto para Ellipse-D
¿Tiene alguna pregunta?
Bienvenido a nuestra sección de preguntas frecuentes. Aquí encontrará respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en contacto con nosotros directamente.
¿Acepta INS entradas de sensores de ayuda externos?
Los sistemas de navegación inercial de nuestra empresa aceptan entradas de sensores de ayuda externos, como sensores de datos aéreos, magnetómetros, odómetros, DVL y otros.
Esta integración hace que el INS sea muy versátil y fiable, especialmente en entornos sin GNSS.
Estos sensores externos mejoran el rendimiento global y la precisión del INS al proporcionar datos complementarios.
¿Cuál es la diferencia entre AHRS e INS?
La principal diferencia entre un Sistema de Referencia de Actitud y rumbo (heading) (AHRS) y un Sistema de Navegación InercialINS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
El AHRS proporciona información sobre la orientación; en concreto, la actitudcabeceo (pitch), balanceo (roll)) y el rumbo (heading) guiñada (raw)) de un vehículo o dispositivo. Suele utilizar una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. El AHRS emite la posición angular en tres ejescabeceo (pitch), balanceo (roll) y guiñada (raw)), lo que permite a un sistema comprender su orientación en el espacio. Se utiliza a menudo en aviación, vehículos aéreos no tripulados, robótica y sistemas marinos para proporcionar datos precisos de actitud y rumbo (heading) , que son fundamentales para el control y la estabilización del vehículo.
INS no sólo proporciona datos de orientación (como un AHRS), sino que también rastrea la posición, velocidad y aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio tridimensional sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, a menudo integrándose con datos externos como GNSS para una mayor precisión.
En resumen, el AHRS se centra en la orientación (actitud y rumbo (heading)), mientras que INS proporciona un conjunto completo de datos de navegación, como la posición, la velocidad y la orientación.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercialIMU) y un sistema de navegación inercialINS) radica en su funcionalidad y complejidad.
Una IMU (unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Proporciona información sobre balanceo (roll), cabeceo (pitch), guiñada (raw) y movimiento, pero no computa datos de posición o navegación. La IMU está diseñada específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS (sistema de navegación inercial) combina los datos IMU con algoritmos avanzados para calcular la posición, velocidad y orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS proporciona datos de navegación en tiempo real, como la posición, la velocidad y la orientación, sin depender de sistemas de posicionamiento externos como el GNSS.
Este sistema de navegación suele utilizarse en aplicaciones que requieren soluciones de navegación completas, sobre todo en entornos sin GNSS, como vehículos aéreos no tripulados militares, buques y submarinos.
¿Qué es el GNSS frente al GPS?
GNSS son las siglas de Global Navigation Satellite System (Sistema Mundial de Navegación por Satélite) y GPS de Global Positioning System (Sistema de Posicionamiento Global). Estos términos suelen utilizarse indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación por satélite.
GNSS es un término colectivo para todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. Incluye múltiples sistemas que proporcionan una cobertura mundial más completa, mientras que el GPS es sólo uno de ellos.
El GNSS mejora la precisión y la fiabilidad al integrar datos de varios sistemas, mientras que el GPS por sí solo puede tener limitaciones en función de la disponibilidad de los satélites y las condiciones ambientales.