Analyse des rollen und der Schräglage von Motorrädern bei der Beschleunigung
Fahrradgeschwindigkeit, Querbeschleunigung und rollen.
"Sie mögen die kompakte Größe der Ellipse-N und die beeindruckende Robustheit der Position in Verbindung mit dem CAN-Kommunikationsprotokoll und der guten Präzision auch unter vibrierenden Bedingungen." | Ashish S., Direktor von Zen Microsystems

Reifenprüfung
Reifenqualität und -leistung sind entscheidende Komponenten für sicheres Fahrverhalten und Komfort. Zweiradhersteller achten bei der Auswahl ihrer Anbieter genau auf die Reifenleistung.
Ein indischer Reifenhersteller wandte sich an Zen Microsystems, um die gute Haftung seiner Reifen sowie die Kurvengängigkeit im Vergleich zu den marktführenden Reifen zu testen.
Zen Microsystems ist ein renommierter indischer Händler für Prüfgeräte. Das Unternehmen lieferte eine vollständige Reifenanalyse unter Verwendung des Ellipse-A lage und richtung (AHRS) von SBG Systems.
Testergebnisse
Der Test fand in einem Antriebskreis statt. Das Team von Zen Microsystems installierte die Ellipse-A in Verbindung mit einem CAN-Datenlogger mit integriertem GPS-Empfänger.
Das Fahrrad wurde mit den Reifen des Zen-Kunden und anschließend mit den Reifen des Marktführers für eine Vergleichsanalyse ausgestattet. Für beide Tests wurde dieselbe Testausrüstung verwendet, um die Geschwindigkeit, die Querbeschleunigung und die Schräglage des Fahrrads zu messen ( rollen Fahrrads).
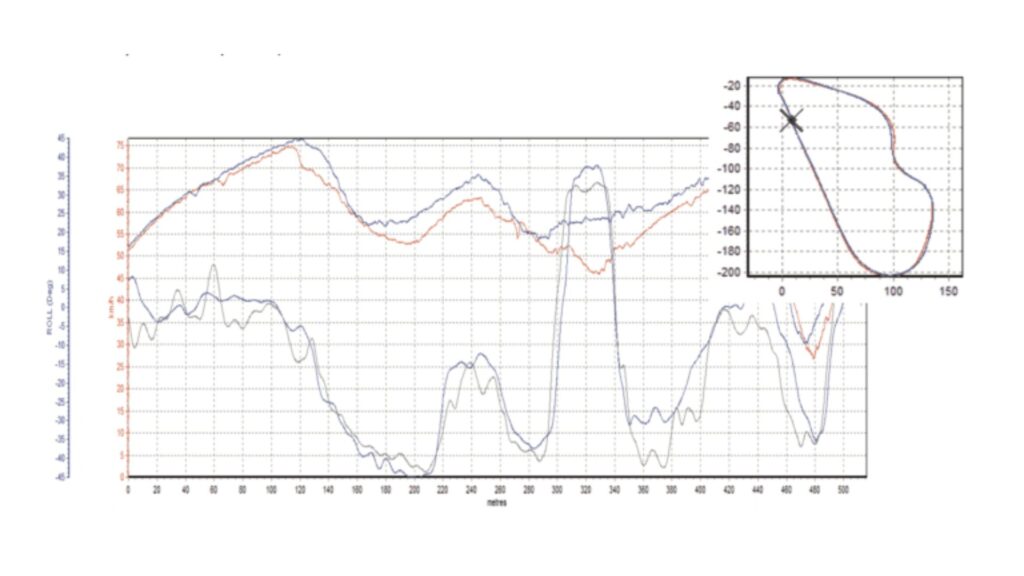
Die Analyse zeigte, dass bei gleicher Kurve (Kurve) und höherer Geschwindigkeit die Reifen des Kunden Zen Microsystems ein höheres rollen Motorrads in den Kurven und eine höhere seitliche Beschleunigung zulassen, was eine höhere Haftung der Reifen auf der Straße bedeutet (höhere Bodenhaftung).
AHRS vs. INS mit integriertem GNSS-Empfänger
Diese vollständige Analyse war entscheidend für den Kunden, der damit die hohe Qualität seiner Produkte gegenüber dem Zweiradhersteller nachweisen konnte.
Das für den Test verwendete Ellipse-A AHRS ist ein äußerst robuster Miniatur-Inertialsensor, der dank der integrierten erweiterten Kalman-Filterung (EKF) rollen, nicken und magnetische richtung liefert.
Das AHRS ist umfassend in Bezug auf Temperatur und Dynamik für Verzerrungen, Fehlausrichtung usw. kalibriert. Da auf einem Fahrrad nur wenig Platz für die Testausrüstung zur Verfügung steht, empfahl Ashish Samant, Direktor von Zen Microsystems, seinem Kunden die Ellipse-N, das INS von SBG Systems.
Die Ellipse-N ist ein Miniatur-Trägheitsnavigationssystem, das einen L1-GNSS-Empfänger integriert und die Position mit den Trägheitsdaten für eine reibungslose Flugbahn selbst bei Ausfällen in der Nähe von Bäumen, Gebäuden usw. zusammenführt.
Nach diesem erfolgreichen Test entschied sich der Kunde von Zen Microsystems für die Ellipse-N.


Ellipse-N
Ellipse-N ist ein kompaktes und leistungsfähiges RTK-Inertial-NavigationssystemINS) mit integriertem Dualband-, Quad-Konstellations-GNSS-Empfänger. Es liefert rollen, nicken, richtung und Heben sowie eine zentimetrische GNSS-Position.
Ellipse-N eignet sich am besten für dynamische Umgebungen und raue GNSS-Bedingungen, kann aber auch in weniger dynamischen Anwendungen mit magnetischer richtung eingesetzt werden.

Angebot für Ellipse-N anfordern
Haben Sie noch Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die am häufigsten gestellten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie uns gerne direkt kontaktieren!
Akzeptiert INS Eingaben von externen Hilfssensoren?
Die Trägheitsnavigationssysteme unserer Firma akzeptieren Eingaben von externen Hilfssensoren, wie z.B. Luftdatensensoren, Magnetometer, Odometer, DVL und andere.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in Umgebungen, in denen kein GNSS verfügbar ist.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS , indem sie ergänzende Daten liefern.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer InertialmesseinheitIMU) und einem InertialnavigationssystemINS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU (Inertialmesseinheit) liefert Rohdaten über die lineare Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, die von Beschleunigungsmessern und Gyroskopen gemessen werden. Sie liefert Informationen zum rollen, nicken, Gieren und zur Bewegung, berechnet aber keine Positions- oder Navigationsdaten. Die IMU ist speziell dafür ausgelegt, wichtige Bewegungs- und Orientierungsdaten für die externe Verarbeitung zur Bestimmung von Position und Geschwindigkeit zu übermitteln.
Ein INS (Inertial Navigation System) hingegen kombiniert IMU mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Ausrichtung eines Fahrzeugs über die Zeit zu berechnen. Es beinhaltet Navigationsalgorithmen wie die Kalman-Filterung zur Sensorfusion und -integration. Ein INS liefert Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Ausrichtung, ohne auf externe Positionierungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in Umgebungen, in denen GNSS nicht verfügbar ist, wie z. B. bei militärischen UAVs, Schiffen und U-Booten.
Was ist GNSS im Vergleich zu GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, beziehen sich aber auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. Er umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, während GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine höhere Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen seine Grenzen haben kann.