选择 Ellipse-A 迷你 AHRS 用于远程操作碎石机
我们的 Ellipse-A 集成在 Transmin 的远程操作碎石机中,用于精确定位机械臂。
“传感器承受机器振动的能力以及无需校准或重新校准传感器消除了售后维护,并实现了更高效的工作流程。” | Michael H.,Transmin 高级自动化与控制工程师

Transmin 是一家位于珀斯的澳大利亚公司。他们为采矿资源和散装物料搬运行业提供创新的工程设备和服务。自 1987 年以来,该公司一直在生产:
– 破碎机,
– 重型料仓隔离门,
– 薄型给料机,
– 皮带给料机,以及
– 用于石灰和絮凝剂的成套试剂装置。
他们的破碎机控制系统名为 RockLogic,旨在最大限度地提高速度、生产力和安全性。
实时破碎锤臂姿态/相对位置
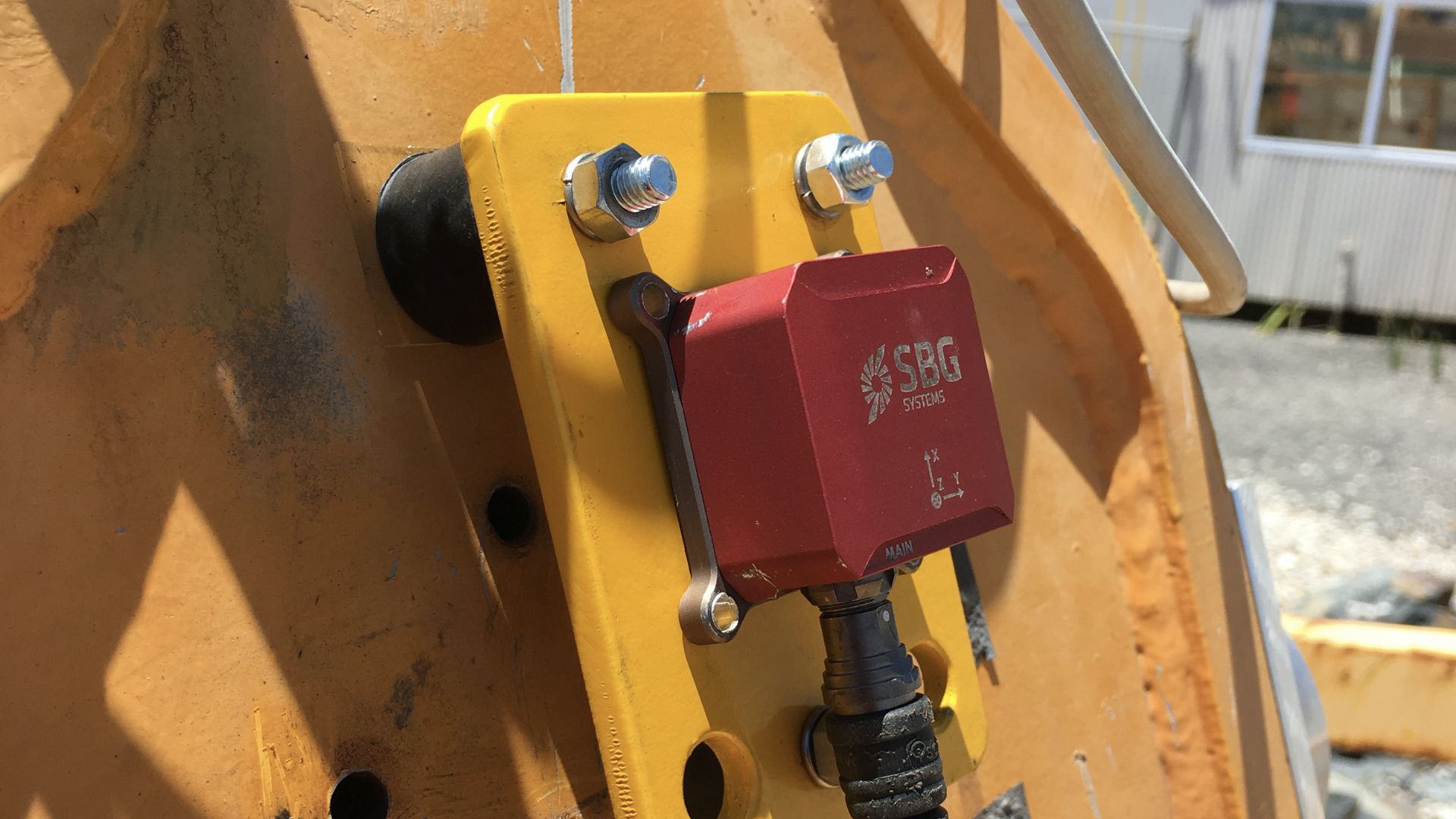
Transmin 的 RockLogic 破岩机使用 Ellipse-A 高性能姿态航向参考系统 (AHRS) 来监测姿态并确定破岩机臂的相对位置。
我们将 Ellipse-A 直接安装在机械臂上,并将其连接到 Transmin 的 PLC 系统,该系统可自主运行整个系统。
操作员可以本地或远程控制 Transmin 的破岩机。此外,AHRS 有助于避免碰撞。

借助我们的 Ellipse 系列,我们提供精确的相对定位,防止与周围设备发生碰撞以及损坏碎石机和场地。
Ellipse-A 是一款微型工业级 AHRS,可提供 3D 横摇、纵倾和磁航向。所选型号配有耐用的 IP68 外壳,可防尘防水。
由于 Ellipse 系列上的 CAN 总线协议标准,将 Ellipse-A 与公司的 PLC 系统连接非常简单。拥有符合标准的接口来连接传感器使其安装和使用立即且毫不费力。
迷你 AHRS,最大限度地抵抗振动
毫无疑问,由于高速运动和岩石的锤击,碎石机会产生大量振动和冲击。该公司主要致力于解决这些振动问题。
为这些极端条件找到高精度和坚固的惯性传感器是一个挑战。
与市场上几种传感器的对比测试表明,SBG Systems 产品的质量和性能卓越,这促使 Transmin 选择了 Ellipse-A。我们的新型 Ellipse 传感器系列以其坚固性而闻名。
我们从市场上可用的高端组件中选择了 Ellipse 加速度计和陀螺仪。
多年来,我们开发和增强了我们的 Ellipse 算法,以满足重型机械的特定动力学。
我们获得的测量结果保持一致和稳健,没有漂移。随后,滤波有助于处理振动,并且安装参数也可以改善解决方案。
“Ellipse 已经使用了多年,并且始终提供持久的运行。” | Michael Hamilton,Transmin 的高级自动化与控制工程师。
澳大利亚沙漠:为什么校准至关重要?
Transmin 的破碎机主要在澳大利亚及其沙漠地区运行,这些地区的气温通常在 0 到 45°C 之间,在阳光下甚至会升至 60°C。
如何在如此极端的条件下提供如此高的可靠性?
所有 Ellipse 微型传感器都受益于使用多轴旋转台和温度室进行的单独高端校准,从而在 -40 °C 至 85 °C 的温度范围内实现高性能。
由于采用了严格的筛选流程,只有符合规格的传感器才能保留用于交付。这就是 SBG Systems 与客户建立信任的方式。
最后,SBG Systems 基于 MEMS 的产品不需要定期校准,从而省去了 Transmin 必须自己重新校准传感器或添加质量控制检查的麻烦。
Transmin 主要在澳大利亚各地运营,但也遍及智利、南非和加拿大。他们的大部分业务都在难以进入的偏远地区运营,例如地下矿山和偏远矿区等。

因此,为了维护目的而不得不长途跋涉返回主站点,其效率不如使用校准后的传感器。
Ellipse-A 使远程操作更加容易,从而也有助于降低维护成本。它使设备能够每天连续工作而不会中断,从而节省大量时间。
“由于传感器无需校准或重新校准,因此无需对传感器提供售后支持。通过提供一种安装和运行后无需进一步维护的产品,这可以被认为更有效率。” Michael H. 评论道。

Ellipse-A
Ellipse-A 是一款经济实惠的高性能姿态和航向参考系统 (AHRS)。它嵌入了一流的磁力校准程序,可实现最佳航向精度,适用于低至中等动态应用。
这款坚固的惯性运动传感器经过工厂校准,范围从 -40°C 到 85°C,可提供横摇、纵倾、航向和升沉数据。

询价 Ellipse-A
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
AHRS 和 INS 之间有什么区别?
姿态和航向参考系统 (AHRS) 与惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供方向数据(如 AHRS),还跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的位置和速度跟踪算法,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。
什么是相对位置?
相对位置指的是移动平台相对于已知起点而非绝对地理坐标系测量的位移。相对位置不以纬度、经度和海拔高度来表示位置,而是描述了平台从其初始参考系移动了多远以及朝哪个方向移动。
INS 通过对随时间测量的加速度和旋转速率进行积分来计算此值:加速度计确定速度变化,然后这些速度再次积分以获得位置变化,所有这些都表示在定义的坐标系中,例如本体坐标系或局部导航坐标系。
由于相对位置不依赖于外部信号——GNSS、无线电信标或地标——因此它在 GPS 受限环境、室内操作、水下导航或任何只需要自上次已知点以来的运动的任务中都非常有价值。
然而,由于传感器偏差和噪声引起的漂移,相对位置的精度会随着时间的推移而降低,这就是为什么 INS 解决方案通常将惯性数据与辅助源(如 GNSS、里程计、DVL 或气压计)结合使用,以限制误差增长。最终,相对位置提供了一种连续且自主的跟踪运动方式,构成了许多航空航天、海洋和机器人应用中航位推算、制导和控制系统的支柱。
