Під час встановлення інерційної навігаційної системи (INS) значну складність становить точне визначення довжини плеча між GNSS INS GNSS , а також між INS додатковими датчиками, такими як одометр або DVL.
Що таке плече важеля?
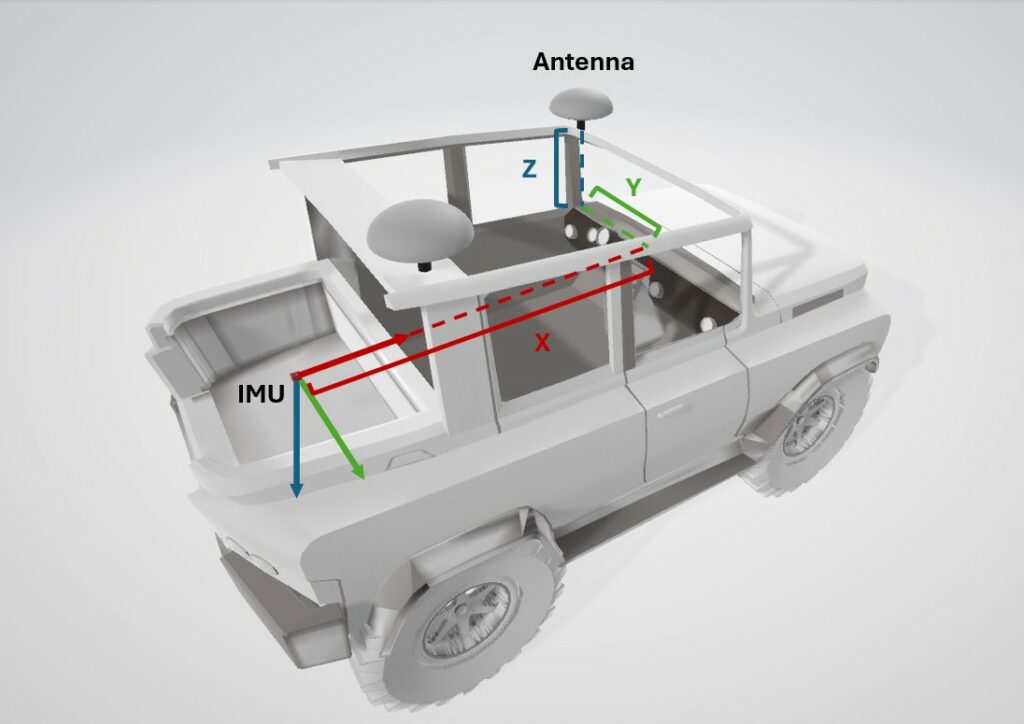
Плече важеля — це зміщення положення GNSS або інших опорних точок на платформі відносно INS точки INS , яке зазвичай виражається у вигляді тривимірного вектора (X, Y, Z).
Точне визначення плеча важеля має вирішальне значення дляINS , оскільки GNSS інформацію про положення антени, тоді як інформація про орієнтацію, обчислена системою INS з самим датчиком, який встановлений в іншому місці.
Це зміщення між місцем розташування антен та місцем розташування системи INS ці точки під час руху зазнають різної динаміки.
Проблеми, пов’язані з традиційним методом оцінки важеля
Навіть незначні похибки в оцінці довжини важеля можуть призвести до значних неточностей у позиціонуванні. Зазвичай це вимагає ретельного ручного вимірювання, що на практиці пов’язано з низкою труднощів:
- Людська помилка: незначні відхилення у вимірюваннях можуть призвести до накопичення похибок у розрахунках позиціонування.
- Складний доступ до місць кріплення: IMU GNSS можуть бути встановлені у важкодоступних місцях, що ускладнює проведення точних вимірювань.
- Тривалий процес: для забезпечення високої точності необхідні численні перевірки та підтвердження, що подовжує час установки.
Автоматизоване рішення: Qinertia Lever Arm
Щоб спростити цей процес та підвищити як ефективність, так і точність, ми представляємо Qinertia-leverArm — безкоштовний інструмент для розрахунку плеча важеля, призначений для автоматичного перерахунку цього параметра. Він позбавляє від необхідності ретельного ручного вимірювання, дозволяючи користувачам систем SBG встановлювати свої IMU приблизних даних, а потім уточнювати їх за допомогою цього інструменту.
Основні переваги
Qinertia Lever Arm має низку переваг, які роблять це рішення революційним у сфері оцінки плеча важеля. Ось основні переваги, що виділяють це рішення серед інших:
- Безкоштовно та доступно: доступно для всіх користувачів, які мають обліковий запис MySBG, без додаткових витрат.
- Сумісний з усіма продуктами SBG.
- Не потрібно вручну вводити точні значення: почніть із приблизних вимірів, а Qinertia-leverArm сам їх уточнить.
- Підвищена точність позиціонування з мінімальними зусиллями: використовуйте дані PPK для динамічного розрахунку плеча важеля.
- Завдяки Qinertia-leverArm користувачі можуть отримати більш точні значення плеча важеля, що забезпечує кращу точність позиціонування без необхідності ручного регулювання.
Перегляньте відео нижче, щоб ознайомитися з покроковою інструкцією.

Почніть роботу з Qinertia Lever Arm
Готові самостійно випробувати наш інструмент для розрахунку плеча сили? Завантажте останню версію Qinertia у розділі «Завантажити» вашого облікового запису MySBG. Після встановлення просто увійдіть у свій обліковий запис MySBG під час запуску інструменту Qinertia для розрахунку плеча сили.
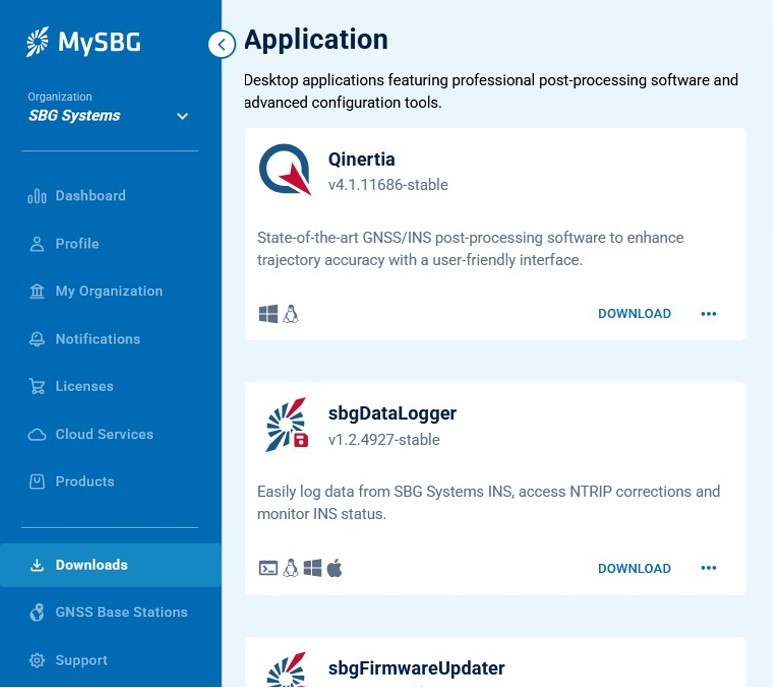
Якщо у вас ще немає облікового запису MySBG, просто зайдіть на сайт my.sbg-systems.com, щоб зареєструватися та розпочати роботу!
