
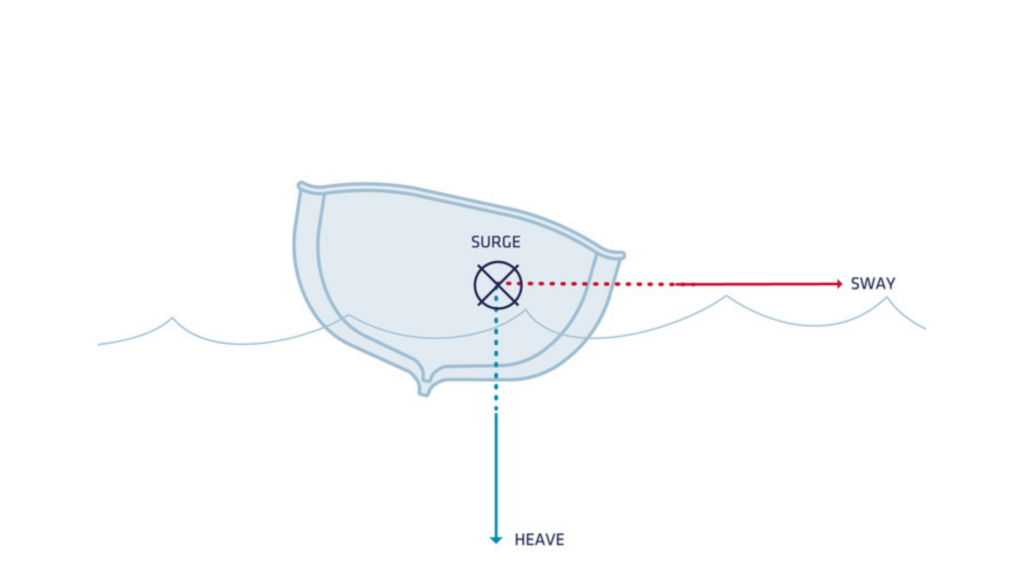
Seegang ist eine Bewegungsmessung, die sehr spezifisch für Marineanwendungen ist. Sie bezieht sich auf die Auf- und Abwärtsbewegung eines Schiffes aufgrund von Wellenbewegung, gemessen als lineare Verschiebung entlang der lokalen vertikalen Achse, wobei ein Mittelwert von Null im Schwerpunkt des Schiffes angenommen wird.
Es wurden größere Aktualisierungen an unseren Echtzeit- und verzögerten Seegangsalgorithmen vorgenommen.
Weitere Informationen zu unserem Seegangsalgorithmus und dessen korrekter Einrichtung finden Sie auf der Wissensdatenbankseite unseres Support-Centers.
Neueste Entwicklungen
Unsere aktuellen Echtzeit- und Delayed-Heave-Algorithmen sind bereits branchenführend und haben die besten Spezifikationen. Wir haben jedoch bedeutende Verbesserungen vorgenommen, um ihre Genauigkeit weiter zu verbessern. Die neuesten Fortschritte, die in der Firmware-Version 5.1 eingeführt wurden, nutzen den Abstand vom Center of Rotation (COR) zur IMU (Inertial Measurement Unit), was zu den folgenden Vorteilen für sowohl Echtzeit- als auch Delayed-Heave-Algorithmen führt:
- Verbesserte Leistung:
- Die Echtzeit-Seeganggenauigkeit wurde von 5 cm auf 4 cm verbessert.
- Verbesserte verzögerte Heave-Genauigkeit von 2,5 cm auf 2 cm.
- Flexible IMU-Installation: Die IMU kann nun überall auf dem Schiff installiert werden, solange der Abstand zum COR angegeben wird. Dies ist eine deutliche Verbesserung gegenüber früheren Versionen, bei denen die IMU in der Nähe des COR des Schiffes positioniert werden musste – eine Herausforderung für größere Schiffe.
- Verbesserter Betrieb in anspruchsvollen Seegangsbedingungen: Die volle Leistung bleibt auch unter anspruchsvolleren Seebedingungen erhalten.
Qualifizierung neuer Algorithmen
Die Qualifizierung der Seegangsleistung ist von Natur aus eine Herausforderung, insbesondere wenn eine hohe Genauigkeit angestrebt wird. So sind wir vorgegangen:
Evaluierungsprozess
Wir haben mehrere Auswertungen durchgeführt, darunter Vergleiche von bathymetrischen Datensätzen, die aus wiederholten Durchgängen über dasselbe Meeresbodengebiet abgeleitet wurden. Diese Auswertungen wurden von unserem Kunden und Partner Norbit ermöglicht.
- Bathymetrische Auswertungen: Durch den Vergleich mehrerer Vermessungslinien über demselben Gebiet haben wir eine Obergrenze für die Heave-Leistung festgelegt. Diese Methode berücksichtigt die Fehler der gesamten Erfassungskette, einschließlich derer aus der INS-Position und den Winkelmessungen, dem Fächerecholot und anderen Quellen.
- Verifizierung der Nachbearbeitung: Wir haben unseren neuen Delayed-Heave-Algorithmus auch mit Qinertia nachbearbeiteten GNSS-Daten getestet. Die Ergebnisse zeigten, dass der neue Algorithmus vergleichbar mit RTK arbeitet.
Ergebnisse und Schlussfolgerung
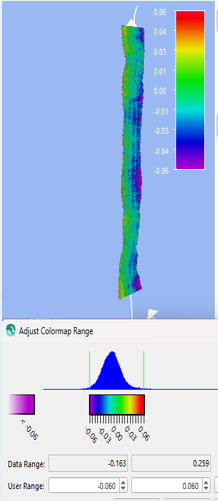
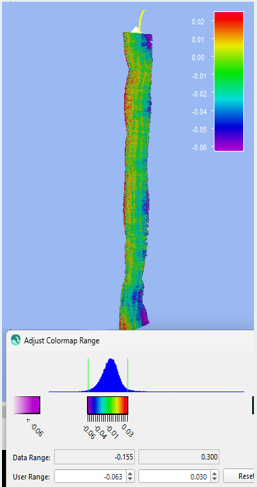
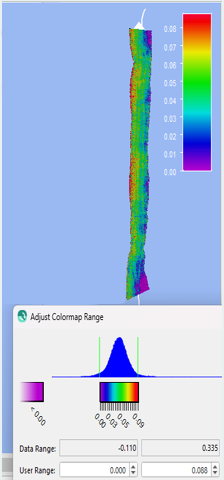
Die folgenden Screenshots zeigen einen direkten Vergleich der alten und neuen Algorithmusversionen. Beachten Sie, dass sich zwar die Farbskalen unterscheiden, die bereitgestellten Statistiken jedoch eine deutliche Verbesserung zeigen. Es ist erwähnenswert, dass die Werte trotz visueller Artefakte im alten Seegangsalgorithmus, die auf ungewöhnliche Seegangsbedingungen und eine große Schiffsanordnung zurückzuführen waren, innerhalb der Spezifikationen blieben.
Vergleich der alten und neuen Algorithmusversionen
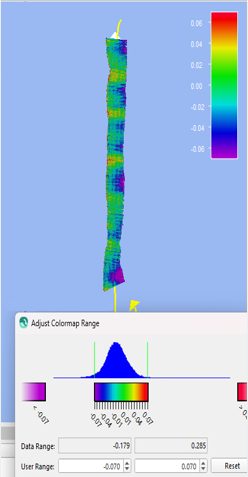
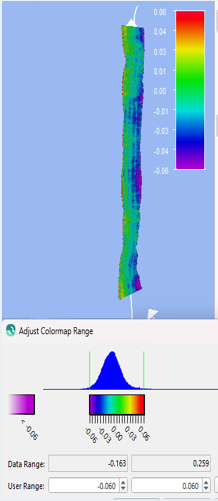
Diese Auswertungen bestätigen die deutliche Verbesserung der Leistung unserer neuen Seegangsalgorithmen und bieten eine überlegene Genauigkeit und Zuverlässigkeit unter verschiedenen Bedingungen.
Verbesserung der Echtzeit- und verzögerten Seegangsmessungen
Die Leistungsverbesserungen sind in der folgenden Tabelle zusammengefasst, die eine deutliche Verbesserung sowohl bei Echtzeit- als auch bei verzögerten Seegangsmessungen zeigt.
| Alte Echtzeit-Seegangskorrektur | Neuer Echtzeit-Seegang | Alte verzögerte Seegangskorrektur | Neuer verzögerter Seegang (delayed heave) | PPK-Referenz | |
|---|---|---|---|---|---|
| Mittelwert | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| Standardabweichung | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
Diese Verbesserungen stellen sicher, dass Sie mit unserer leistungsstarken Produktlinie:
- Echtzeit-Seeganganwendungen erreichen eine Genauigkeit von 4 cm.
- Vermessungsanwendungen, die mit verzögerter Seegangskorrektur kompatibel sind und von den wichtigsten hydrographischen Softwarepaketen unterstützt werden, erreichen eine Genauigkeit von 2 cm.
Zusätzlich profitiert die höhenverbesserte Höhenfunktion, die für Marineeinheiten verfügbar ist, von diesen Verbesserungen. Alle diese Verbesserungen sind in unserer Qinertia 4 Post-Processing-Software und unseren Hochleistungsprodukten ab der Firmware-Version 5.1 verfügbar. Diese Verbesserungen werden in Kürze auf unsere Ellipse-Produktreihe ausgeweitet.