
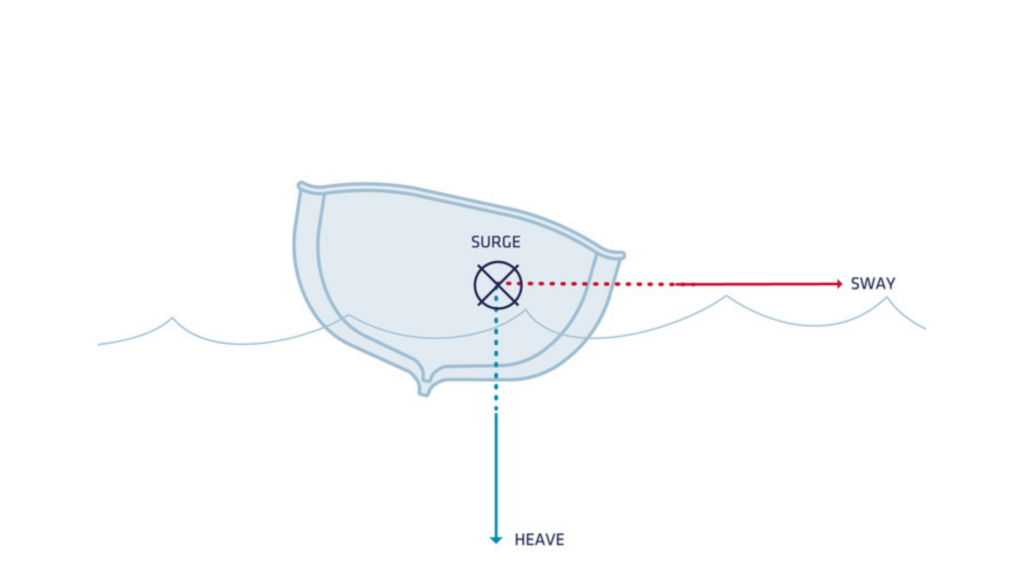
升沉是船舶应用特有的一种运动测量。它指的是由于波浪作用引起的船舶上下运动,测量为沿局部垂直轴的线性位移,假设船舶重心的平均值为零。
我们的实时和延迟升沉算法已应用了重大升级。
有关我们的升沉算法以及如何正确设置的更多详细信息,请访问我们的支持中心知识库页面。
近期发展
我们当前的实时和延迟升沉算法已经是行业领先的,并且具有最佳的规格。但是,我们已经进行了重大改进,以进一步提高其精度。在 5.1 固件版本中引入的最新进展使用到旋转中心 (COR) 到 IMU(惯性测量单元)的距离,从而为实时和延迟升沉算法带来以下好处:
- 增强的性能:
- 实时升沉精度从 5 厘米提高到 4 厘米。
- 延迟升沉精度从 2.5 厘米提高到 2 厘米。
- 灵活的 IMU 安装:现在可以将 IMU 安装在船上的任何位置,只要提供到 COR 的距离即可。与以前的版本相比,这是一个显着的改进,以前的版本要求 IMU 位于船只的 COR 附近,这对较大的船只来说是一个挑战。
- 在具有挑战性的海况下改善操作:即使在更苛刻的海况下也能保持全部性能。
新型算法的验证
确定纵摇性能本身就具有挑战性,尤其是在追求高精度时。以下是我们如何解决这个问题的:
评估过程
我们进行了多次评估,包括对同一海底区域重复扫描所获得的水深数据集进行比较。这些评估由我们的客户和合作伙伴 Norbit 协助完成。
- 测深评估:通过比较同一区域的多条测量线,我们建立了升沉性能的上限。此方法考虑了整个采集链的误差,包括来自 INS 位置和角度测量、多波束声纳和其他来源的误差。
- 后处理验证:我们还使用 Qinertia 后处理的 GNSS 数据测试了我们新的延迟升沉算法。结果表明,新算法的性能与 RTK 相当。
结果与结论
以下屏幕截图提供了新旧算法版本的并排比较。请注意,虽然颜色比例不同,但提供的统计数据清楚地表明有所改进。值得一提的是,尽管旧的升沉算法中存在视觉伪影(这是由于异常的海况和大型船舶设置造成的),但这些值仍保持在规格范围内。
新旧算法版本对比
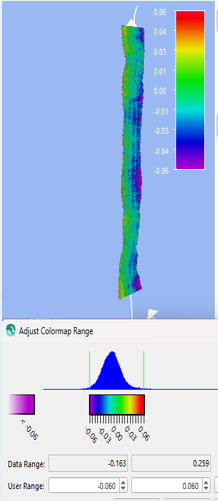
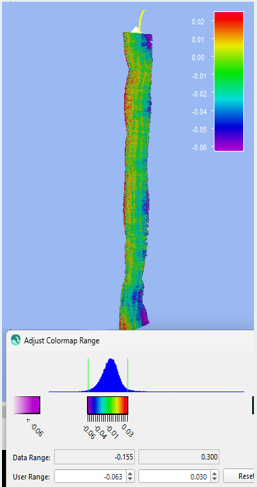
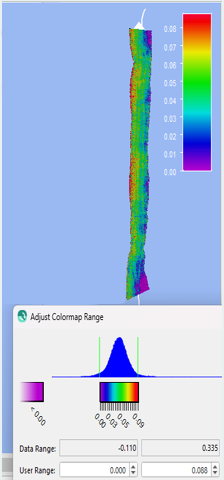
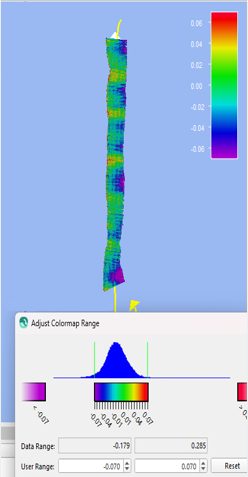
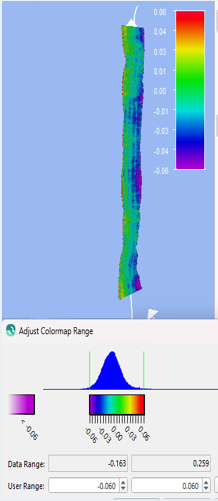
这些评估证实了我们新的升沉算法在性能上的显著改进,从而在各种条件下提供卓越的精度和可靠性。
改进了实时和延迟的纵摇测量
性能增强总结在下表中,显示了实时和延迟升沉测量的明显改进。
| 旧实时纵摇 | 全新实时升沉补偿 | 旧延迟纵摇 | 新的延迟升沉补偿 | PPK 参考 | |
|---|---|---|---|---|---|
| 平均值 | 4 厘米 | 3 厘米 | 4 厘米 | 1 厘米 | 1 厘米 |
| 标准差 | 4 厘米 | 2 厘米 | 2 厘米 | 2 厘米 | 2 厘米 |
这些增强功能确保了我们的高性能产品线:
- 实时升沉应用达到4厘米的精度。
- 测量应用与延迟的升沉补偿兼容,并由主要的 水文软件包支持,可实现 2 厘米的精度。
此外,船用设备上提供的升沉增强高度功能将受益于这些改进。所有这些增强功能都可以在我们的 Qinertia 4 后处理软件和固件版本 5.1 开始的高性能产品中使用。这些改进将很快扩展到我们的 Ellipse 产品系列。
