Amerikanische Soldatenfriedhöfe werden für eine feierliche Mission digitalisiert
"Wir haben uns für die Ellipse-D entschieden, weil sie eine All-in-One GNSS- und Inertial-Lösung in einem kompakten Gerät mit geringem Stromverbrauch bietet." | Matthew R. Staley, Military Engineering & Survey Support Scientist am US Army Geospatial Center
Das Army Geospatial Center (AGC) hat Innovationen angewandt, um Besuchern amerikanischer Militärfriedhöfe zu helfen, ihre Angehörigen zu finden.
Herkömmliche GPS-Vermessungsmethoden und 3D-Kartendigitalisierung wurden integriert und an einem Rucksack angebracht, der speziell für die Sammlung dieses Projekts gebaut wurde.
Eine Webschnittstelle, die als Front-End für die gesammelten Daten fungiert, bietet eine einfache Schnittstelle für Besucher, um ihre Angehörigen zu finden und auf erweiterte Informationen zuzugreifen, die in der GIS-Datenbank gespeichert sind.
Ein Pilotprojekt für eine feierliche Mission
Um einen bestimmten Grabstein auf einem amerikanischen Nationalfriedhof zu finden, ist oft eine umfangreiche und zeitaufwändige Überprüfung der Unterlagen durch die Verwalter erforderlich.
Um den Besuchern das Auffinden ihrer Angehörigen zu erleichtern, hat das Army Geospatial Center (AGC) in Zusammenarbeit mit dem Arlington National Cemetery (ANC) ein Pilotprojekt abgeschlossen, das die Friedhöfe Corozal (Panama) und Normandy (Frankreich) einschließt, die zusammen mehr als 15.000 Grabstätten umfassen.
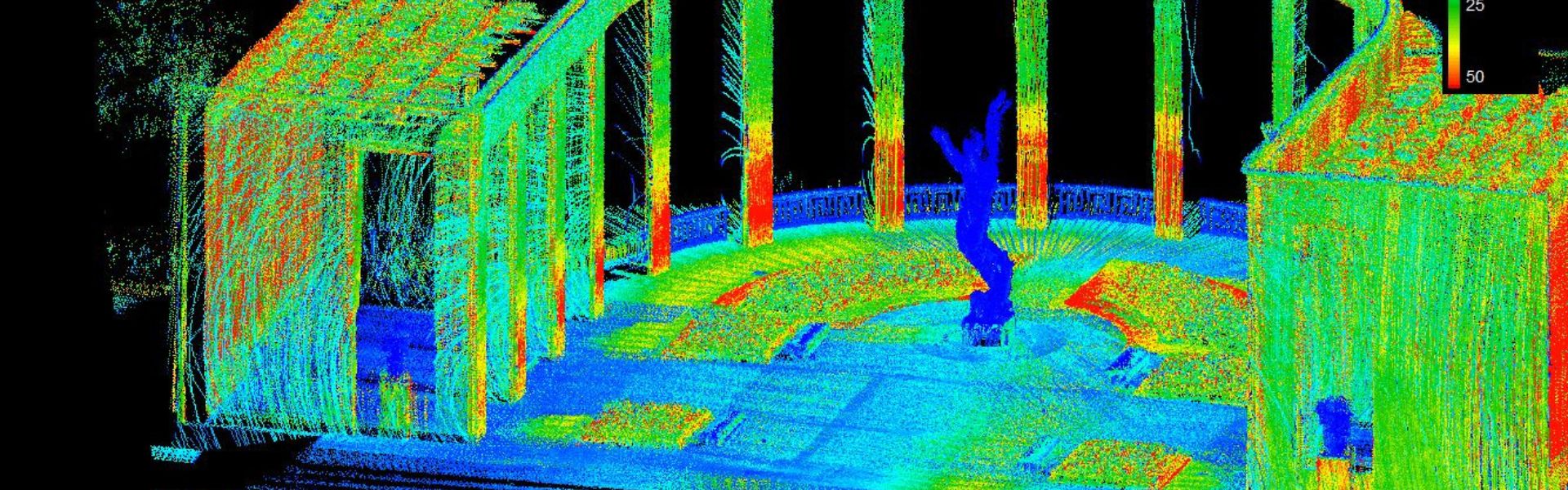
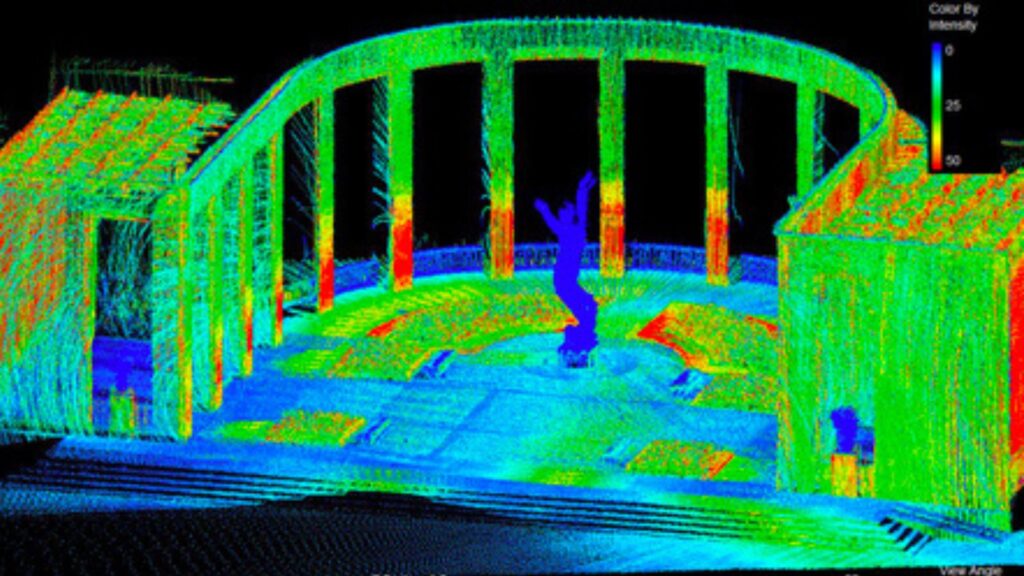
Dieses umfangreiche Projekt kombiniert traditionelle Vermessungsmethoden mit modernen Technologien, um virtuelle Modelle beider Friedhöfe zu erstellen.
Die Modelle enthalten nicht nur das zugrunde liegende Gelände und die GPS-Koordinaten für jeden Grabstein oder jedes Denkmal, sondern auch Merkmale wie Straßen, Gehwege, Bäume, Bordsteine, Rinnen, Denkmäler und viele andere vom Menschen geschaffene Strukturen mit einer geschätzten Genauigkeit von 10 cm.
Geolokalisierte Fotos der Vorder- und Rückseite jedes Grabsteins, die bei der Identifizierung helfen, vervollständigten die Erfassungslösung.
Die gesammelten Daten wurden auf dem ENFIRE-Laptop verarbeitet und integriert. Dank dieser Neuerungen können Besucher auf Friedhofsdaten zugreifen, nach Angehörigen suchen oder historisch bedeutsame Grabstätten finden, indem sie die Kioske in den Einrichtungen nutzen, in denen das ANC Explorer-Programm läuft.
Virtuelle Besucher haben die gleiche Funktionalität, wenn sie das Programm auf ihrem Heimcomputer oder einem mobilen Gerät nutzen.
Mobile Mapping-Methode auf Basis eines Rucksacks
Um die Friedhöfe in ihrer Gesamtheit und mit einem Höchstmaß an Details zu kartieren, entwickelte Matthew R. Staley, Military Engineering and Survey Support Scientist am Geospatial Center der US-Armee, eine rucksackgestützte mobile Kartierungslösung.
Der Einsatz der Ausrüstung minimiert die Kosten, indem er die Erfassungszeiten verkürzt und Daten in einfach zu verwaltenden Formaten bereitstellt. Es nutzt die von den Vermessungsdiensten des US-Militärs verwendeten Tools ENFIRE und GPS-S.
"Ich habe ein LiDAR von Velodyne mit dem Ellipse-D Inertial Navigation System (INS) mit integriertem RTK-GPS von SBG Systemsgekoppelt", erklärt Matthew R. Staley.
Er entschied sich für das Ellipse-D , weil es eine All-in-One GNSS- und Inertiallösung in einem kompakten Gerät mit geringem Stromverbrauch bietet.
Das INS wird für den Bewegungsausgleich und die Georeferenzierung der cloud verwendet. Um eine optimale Genauigkeit zu erreichen, wurde auf dem Friedhof eine RTK-Basisstation (Real Time Kinematic) installiert. Zur Verwaltung der erzeugten cloud wurde die Hypack-Software verwendet.
Einstellen der magnetischen Deklination
Eine der Herausforderungen war die Kalibrierung des Magnetometers, die durch den Eisengehalt des Standorts beeinflusst wird. Die magnetische Deklination ändert sich je nach Standort; so änderte sich die magnetische Deklination beim Transport des Rucksacks von den USA nach Frankreich.
Die amerikanische National Oceanographic and Atmospheric Agency (NOAA) aktualisiert alle fünf Jahre eine globale Karte des Erdmagnetfelds.
Diese Karte kann verwendet werden, um die magnetische Deklination an einem bestimmten Ort und zu einem bestimmten Datum zu bestimmen.
SBG Systems bettet diese Karte in seine Trägheitsnavigationssysteme ein und ermöglicht so die automatische richtung wahren Nordens bei Verwendung von Magnetometern.
Vermessung im Umfeld von Bäumen
Eine weitere Herausforderung war die Vermessung in der Nähe von bestimmten Baumarten, die den Satellitenempfang stark beeinträchtigen. Herr Staley änderte das Datenerfassungsverfahren, um dieses Problem zu kompensieren, und forscht weiter nach Möglichkeiten, die Auswirkungen der Vegetation auf den Empfang weiter abzuschwächen.
Darüber hinaus wird eine Verringerung der LiDAR-Reichweite zur Erzielung einer besseren Genauigkeit (insgesamt +/- 5 cm) als Möglichkeit zur Abschwächung von Gier-Artefakten untersucht.
"Ich werde demnächst die Qinertia-Nachverarbeitungssoftware von SBG testen, die dabei helfen könnte, eine robuste Genauigkeit unter allen Bedingungen aufrechtzuerhalten", fügt der U.S. Military Engineer hinzu.
Post-Processing-Kinematik-Software (PPK) wie Qinertia ermöglicht den Zugang zu Offline-RTK-Korrekturen und verbessert die Leistung von Trägheitsnavigationssystemen durch die Nachbearbeitung von Trägheitsdaten mit rohen GNSS-Observablen unter Verwendung einer Berechnung namens Forward-Backward-Merge.
Die kürzlich veröffentlichte Qinertia-Software wurde so konzipiert, dass sie intuitiv und einfach zu bedienen ist, und wurde von unabhängiger Seite als die schnellste Post-Processing-Software auf dem Markt bezeichnet.
Was kommt als Nächstes?
Die primäre Aufgabe war die Erfassung von Daten über Bestattungen und die Bestätigung der Anwendbarkeit von ENFIRE, GPS-S und LiDAR-Toolsets für den Betrieb und die Verwaltung des Arlington National Cemetery.
Die Fähigkeit, das Gelände zu prüfen, Aufzeichnungen zu aktualisieren, Bau- und Instandhaltungsmaßnahmen auf der Grundlage der gesammelten LiDAR-Daten durchzuführen und strategische Pläne zu entwickeln, die eine höhere Effizienz der Geschäftsprozesse unterstützen, wurde realisiert.
Nach Abschluss der Pilotphase arbeitet das Army Geospatial Center nun eng mit dem Arlington National Cemetery und der American Battle Monuments Commission zusammen, um die Ergebnisse zu bewerten und eine Strategie für künftige Verbesserungen und Innovationen festzulegen.
Die ersten Ergebnisse zeigten (im Vergleich zu früheren Bemühungen), dass die Kosten minimiert wurden und sich die Investition für mehrere Gemeinden insgesamt hervorragend rentierte.


Ellipse-D
Das Ellipse-D ist ein Trägheitsnavigationssystem, das eine Doppelantenne und ein RTK-GNSS mit zwei Frequenzen integriert und mit unserer Post-Processing-Software Qinertia kompatibel ist.
Es wurde für Robotik- und Geospatial-Anwendungen entwickelt und kann Odometer-Eingaben mit Pulse oder CAN OBDII für eine verbesserte Dead-Reckoning-Genauigkeit verschmelzen.

Angebot für Ellipse-D anfordern
Haben Sie noch Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie uns gerne direkt kontaktieren!
Akzeptiert INS Eingaben von externen Hilfssensoren?
Die Trägheitsnavigationssysteme unserer Firma akzeptieren Eingaben von externen Hilfssensoren, wie z.B. Luftdatensensoren, Magnetometer, Odometer, DVL und andere.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in Umgebungen, in denen kein GNSS verfügbar ist.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS , indem sie ergänzende Daten liefern.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem lage und richtung (AHRS) und einem TrägheitsnavigationssystemINS liegt in ihrer Funktionalität und dem Umfang der von ihnen gelieferten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die lage nicken, rollen) und richtung (gieren) eines Fahrzeugs oder Geräts. Es verwendet in der Regel eine Kombination von Sensoren, einschließlich Gyroskopen, Beschleunigungs- und Magnetometern, um die Ausrichtung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsennicken, rollen und Gieren) aus und ermöglicht es einem System, seine Orientierung im Raum zu verstehen. Es wird häufig in der Luftfahrt, in UAVs, in der Robotik und in Schiffssystemen eingesetzt, um genaue lage und richtung zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs über die Zeit. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum abzuschätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die Sensoren von AHRS (Gyroskope, Beschleunigungsmesser), kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten, die oft mit externen Daten wie GNSS integriert werden, um die Genauigkeit zu erhöhen.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierunglage und richtung) konzentriert, während INS eine ganze Reihe von Navigationsdaten liefert, einschließlich Position, Geschwindigkeit und Orientierung.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer InertialmesseinheitIMU) und einem InertialnavigationssystemINS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU (Inertialmesseinheit) liefert Rohdaten über die lineare Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, die von Beschleunigungsmessern und Gyroskopen gemessen werden. Sie liefert Informationen zum rollen, nicken, Gieren und zur Bewegung, berechnet aber keine Positions- oder Navigationsdaten. Die IMU ist speziell dafür ausgelegt, wichtige Bewegungs- und Orientierungsdaten für die externe Verarbeitung zur Bestimmung von Position und Geschwindigkeit zu übermitteln.
Ein INS (Inertial Navigation System) hingegen kombiniert IMU mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Ausrichtung eines Fahrzeugs über die Zeit zu berechnen. Es beinhaltet Navigationsalgorithmen wie die Kalman-Filterung zur Sensorfusion und -integration. Ein INS liefert Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Ausrichtung, ohne auf externe Positionierungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in Umgebungen, in denen GNSS nicht verfügbar ist, wie z. B. bei militärischen UAVs, Schiffen und U-Booten.
Was ist GNSS im Vergleich zu GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, beziehen sich aber auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. Er umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, während GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine höhere Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen seine Grenzen haben kann.