Braço de alavanca Automatizar a calibração do braçoGNSS
Ao instalar um Sistema de Navegação Inercial (INS), a configuração dos braços de alavanca entre o INS as GNSS , e entre o INS sensores adicionais, como odômetro ou DVL, é um verdadeiro desafio.
Para simplificar essa operação e aumentar a eficiência e a precisão, oferecemos várias soluções de braço de alavanca, projetadas para reestimar o braço de alavanca automaticamente. Elas eliminam a necessidade de medições manuais cuidadosas, permitindo que os usuários dos sistemas SBG instalem sua IMU uma estimativa aproximada e a refinem posteriormente com a ferramenta.
Experimente agora!
Ferramenta de estimativa do braço de alavanca para fusão confiável de sensores
SBG Systems um conjunto abrangente de ferramentas de estimativa de braço de alavanca para atender a todas as necessidades operacionais. A ferramenta incorporada, disponível integrada à interface de nossos HPIs (sistemas inerciais de alto desempenho), fornece estimativa em tempo real dos braços de alavanca primário e secundário, superando os concorrentes que oferecem suporte apenas ao alinhamento de antena dupla. A ferramenta Qinertia Lever Arm é uma solução autônoma gratuita que usa o mecanismo Qinertia no modo de acoplamento flexível, exigindo dados adquiridos por RTK. Tudo o que você precisa é de uma conexão com a Internet para fazer login no MySBG.
A ferramentaQinertia Cloud Arm permite uma estimativa rápida do braço de alavanca com base no navegador, com um fluxo de trabalho simples de arrastar e soltar, ideal para calibração de campo flexível, também contando com dados RTK sem GNSS . Para obter a máxima precisão, o software Qinertia PPK utiliza GNSS para oferecer precisão de nível topográfico, embora seja necessária uma licença. Juntas, essas quatro soluções garantem a calibração precisa do braço de alavanca para todos os usuários, aumentando a confiabilidade da fusão de sensores e garantindo uma navegação consistente e de alto desempenho em todas as plataformas e ambientes.




O que é um braço de alavanca (lever arm)?
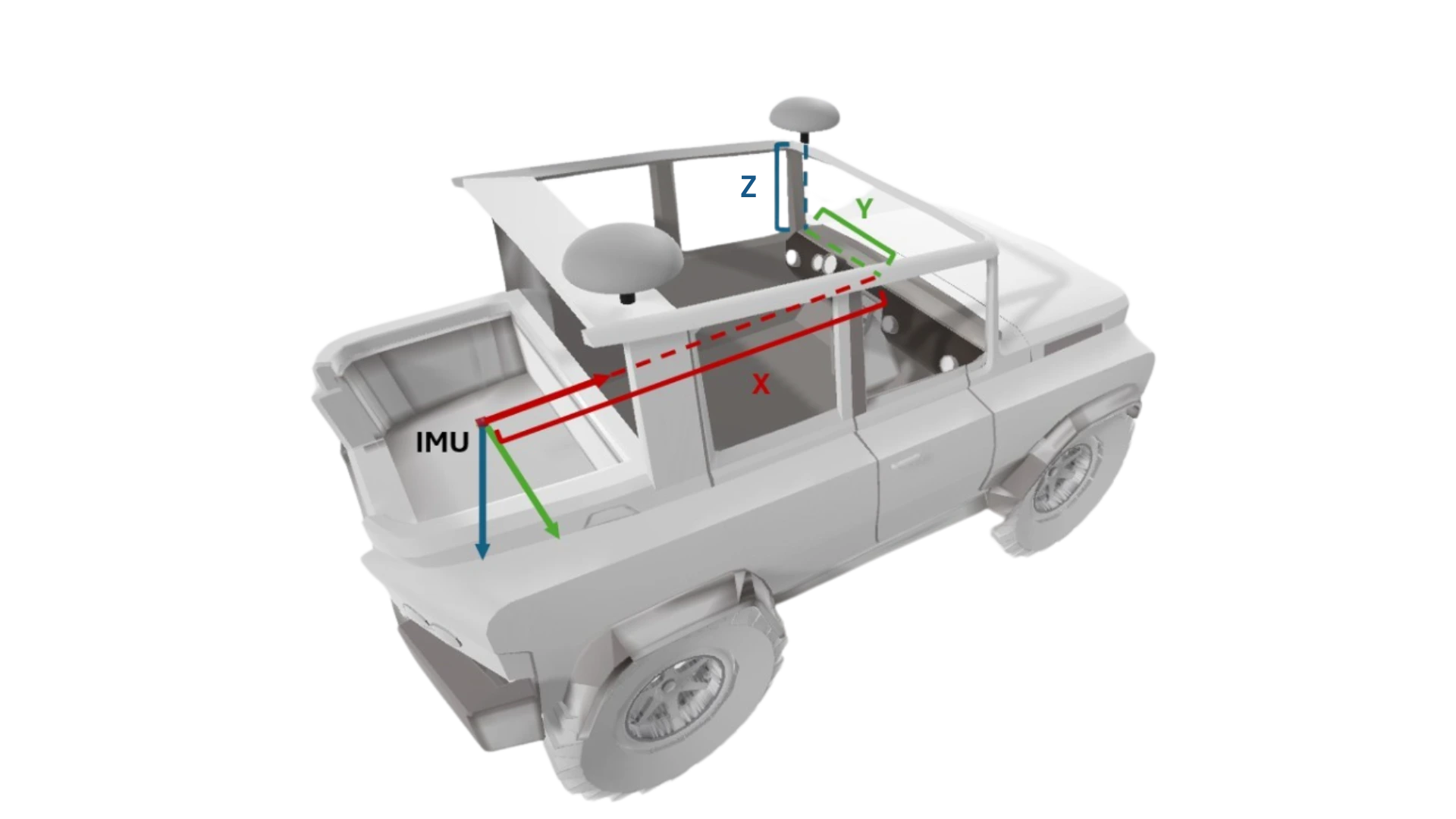
O braço de alavanca é o deslocamento posicional da antena GNSS ou outros pontos de referência na plataforma em relação ao ponto de referência do INS, geralmente expresso como um vetor 3D (X, Y, Z). Isso é fundamental na fusão GNSS/INS porque o GNSS fornece a posição da antena, enquanto as informações de atitude computadas pelo INS são referenciadas dentro do próprio sensor, que é instalado em um local diferente.
Esse deslocamento, entre a localização das antenas e a localização do INS, significa que esses pontos experimentam dinâmicas diferentes durante o movimento.
Mesmo pequenos erros na medição do braço de alavanca podem introduzir imprecisões significativas no posicionamento. Tradicionalmente, isso requer uma medição manual cuidadosa, o que traz vários desafios na prática:
– Erro humano: pequenos desalinhamentos nas medições podem levar a erros cumulativos nos cálculos de posicionamento.
– Dificuldade de acesso aos pontos de montagem: a IMU e a antena GNSS podem ser montadas em locais de difícil acesso, dificultando a medição precisa.
– Processo demorado: garantir alta precisão requer várias verificações e validações, adicionando tempo extra ao processo de instalação.
O ecossistema completo do braço de alavanca
Braço de alavanca em nuvem
O Qinertia Cloud um serviço dedicado de estimativa do braço de alavanca, acessível inteiramente através de um navegador da web, sem necessidade de instalação e com um fluxo de trabalho tão simples quanto arrastar e soltar os dados para carregá-los. Assim como a ferramenta autônoma, ele também deve ser usado com aquisições habilitadas para RTK.
O serviço está atualmente disponível em versão beta e pode ser experimentado gratuitamente, sem necessidade de instalação no computador. O serviço já pode ser explorado através da Qinertia Cloud .
Braço de alavanca independente
A ferramenta autônoma de estimativa do braço de alavanca é fornecida no pacote Qinertia , mas opera de forma independente, fornecendo estimativa do braço de alavanca sem exigir uma Qinertia .
Esta ferramenta suporta apenas INS SBG INS e também pode estimar o braço de alavanca de sensores auxiliares adicionais, como odômetro e DVL, quando disponíveis. Ela usa o mesmo mecanismo de processamento do Qinertia completo, mas opera apenas no modo de acoplamento flexível. Portanto, deve ser usada com aquisições registradas usando RTK para garantir resultados ideais. Ela pode ser acessada instalando o software Qinertia e fazendo login com uma conta MySBG, e está disponível gratuitamente. A ferramenta oferece um fluxo de trabalho conveniente para usuários que desejam uma calibração precisa sem a necessidade de uma Qinertia .
Braço de alavanca embutido
A ferramenta de estimativa do braço de alavanca incorporada está integrada diretamente na linha Navsight Ekinox, Apogee, Quanta Navsight da SBG e oferece calibração em tempo real sem a necessidade de software externo.
É capaz de estimar os braços de alavanca primário e secundário. Os usuários acessam essa funcionalidade por meio da interface web do INS HPI INS , e o recurso está incluído sem custo adicional.
Isso o torna uma solução poderosa para usuários que precisam de calibração imediata no dispositivo e feedback contínuo sobre o desempenho.
Braço de alavanca do software Qinertia
No software Qinertia , os usuários têm acesso ao recurso de estimativa de braço de alavanca mais preciso disponível. Ao injetar GNSS e realizar fusão pós-processada completa, essa ferramenta oferece precisão de nível topográfico e representa a solução premium para aplicações exigentes. O acesso requer uma Qinertia válida Qinertia , mas ela suporta a mais ampla gama de dados e oferece o melhor desempenho de estimativa quando é necessária a máxima precisão.




Escolha sua solução de braço de alavanca
A determinação precisa do braço de alavanca é essencial para obter a precisão total do seu sistema de navegação inercial. Quer você precise de um fluxo de trabalho de estimativa rápido, um processo de calibração totalmente automatizado ou computação embarcada em tempo real, a SBG Systems oferece um conjunto completo de ferramentas adaptadas a cada cenário de integração. Desde utilitários de desktop autônomos a serviços baseados em nuvem e algoritmos embarcados em tempo real, cada opção garante que seu INS forneça alinhamento ideal, erros de instalação reduzidos e desempenho de navegação superior. Explore a solução que melhor se adapta ao seu fluxo de trabalho e arquitetura de plataforma.
| SBG INS | SBG INS Todos | SBG INS Todos | SBG INS Navsight Ekinox, Apogee, Quanta Navsight | SBG INS Todos |
|---|---|---|---|---|
| INS de terceiros | INS de terceiros Não | INS de terceiros Não | INS de terceiros Não | INS de terceiros Sim |
| Sensores auxiliares adicionais (como odômetro ou DVL) | Sensores auxiliares adicionais (como odômetro ou DVL) Sim | Sensores auxiliares adicionais (como odômetro ou DVL) Sim | Sensores auxiliares adicionais (como odômetro ou DVL) Não | Sensores auxiliares adicionais (como odômetro ou DVL) Sim |
| Licença | Licença Gratuita durante o período beta | Licença Uso gratuito | Licença Incluída na compra do produto | Licença Incluída na Qinertia |
| Acesso | Acesse o Navegador da Web, acessado ao fazer login com uma conta MySBG | Acesso Aplicativo independente, acessado ao fazer login com uma conta MySBG | Acesso INS , acessada diretamente através da interface web HPI | Acesso Software para desktop, ativado com uma licença válida |



