
航空导航指的是用于确定飞机在飞行过程中位置和航向的技术和方法。有效的导航可确保飞机安全高效地抵达目的地。以下是航空导航中涉及的一些关键组成部分和方法:惯性导航系统 (INS)、全球导航卫星系统 (GNSS) 等。我们为您准备了一次全面的机载测试。
SBG Systems 秉持着创新文化,因此,当提出进行一次高强度飞行以评估我们的 Ellipse 和 Quanta Micro 在实际条件下的性能时,我们毫不犹豫。这些测试的实现耗费了时间和资源,但其成果是值得的。非常感谢 Apache aviation 在此项目中的帮助。
惯性导航系统 (INS) 在为航空导航应用提供精确的定位和导航信息方面发挥着关键作用。我们已在实际条件下对它们进行了测试,以评估其可靠性。

机载导航领域的一项卓越测试活动
除了进行航空航天测试所涉及的复杂实施(法规、狭窄的空间等)之外,这些试验尤其特殊,因为它们为我们提供了一些问题的答案,而很少有 INS 制造商有机会在真实条件下进行测试:
- 我们的最初目标是丰富我们的测试数据库,重点是持续改进我们的算法。 许多测试通常在“2D”环境中进行(例如,汽车、船只),而“3D”测试相对较少。
- 由于航空航天应用领域的客户数据通常属于机密,因此他们很少提供数据。
- 我们试图解决的另一个问题是验证我们的算法在极端动态条件下的稳健性,包括超过4g的显著振动和加速度。
- 此外,这使我们能够评估我们的设备在具有挑战性的 GNSS 环境中的性能,在这种环境中,由于方向的突然变化,甚至飞机的完全反转(倒飞),存在显着的信号阻塞。
万向节锁效应
这些飞行也使我们能够测试所有可能的姿态,其中一些姿态会产生“万向节锁”效应,传统上,当俯仰角接近 90° 时,这会对某些导航算法造成困难。虽然我们的算法旨在通过使用四元数来处理此问题,但在这种条件下它们很少受到挑战。
最后,除了稳健性和功能性方面,我们的目标是验证在这些极端条件下是否可以保持导航性能。
值得注意的是,这些测试是在盲测条件下进行的。
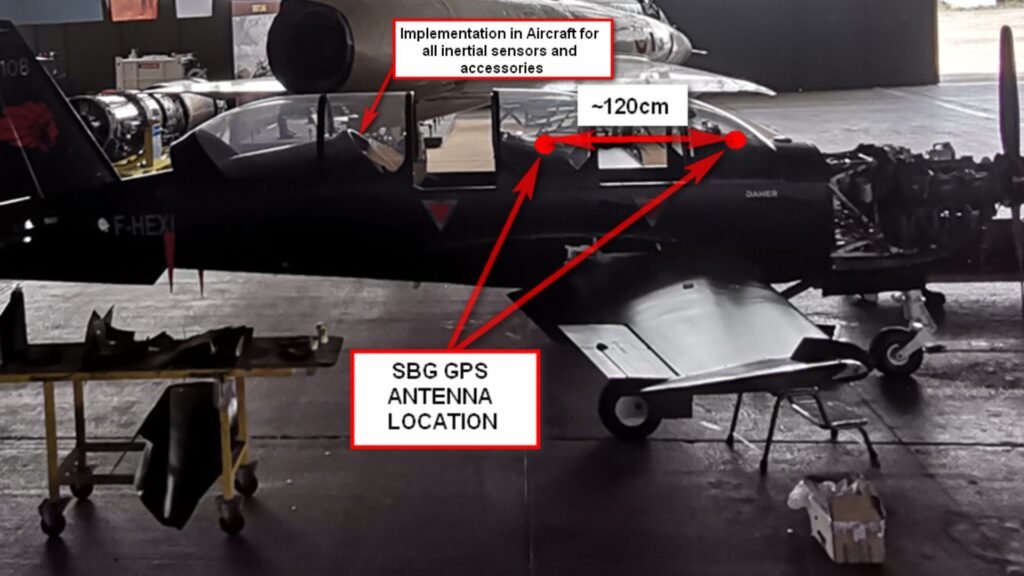
由于安全原因,即使不是不可能,也很难携带笔记本电脑上飞机。由于涉及所有传感器,因此必须在开始飞行测试之前配置并仔细检查所有内容。
测试平台必须完全自主地进行数据记录,并且需要具有足够容量的电池来满足整个准备和飞行过程的需求。所有这些都必须集成在非常紧凑的尺寸内。
设置 & 飞行计划
为了全面评估 INS 设备的性能,我们安排了两次飞行,每次飞行代表空中导航操作期间遇到的不同场景:
- 典型的飞行,具有较低的动态机动和直线水平飞行条件
- 一次特技飞行,以在多个方向和加速度下刺激设备
- 这使我们能够检查产品在常规和具有挑战性的条件下,都能提供指定的实时性能水平。
测试了两种产品:Ellipse-D 和 Quanta Micro。后处理的 Apogee-D(紧耦合 PPK,具有前向 + 后向处理)用作此评估的参考。它们的表现都非常好,比 SBG Systems 的工作人员实际表现得更好。
飞行 1:典型飞行剖面
Flight 1 的主要重点是评估设备在典型飞行剖面中的性能,包括较低的动态机动和直线水平飞行条件。
本次飞行为比较提供了一个基线,并评估 INS 设备在常规飞行操作期间的精度和稳定性。
本次飞行期间收集的数据有助于建立一个基准,用于评估其在更具挑战性的机载导航条件下的性能。
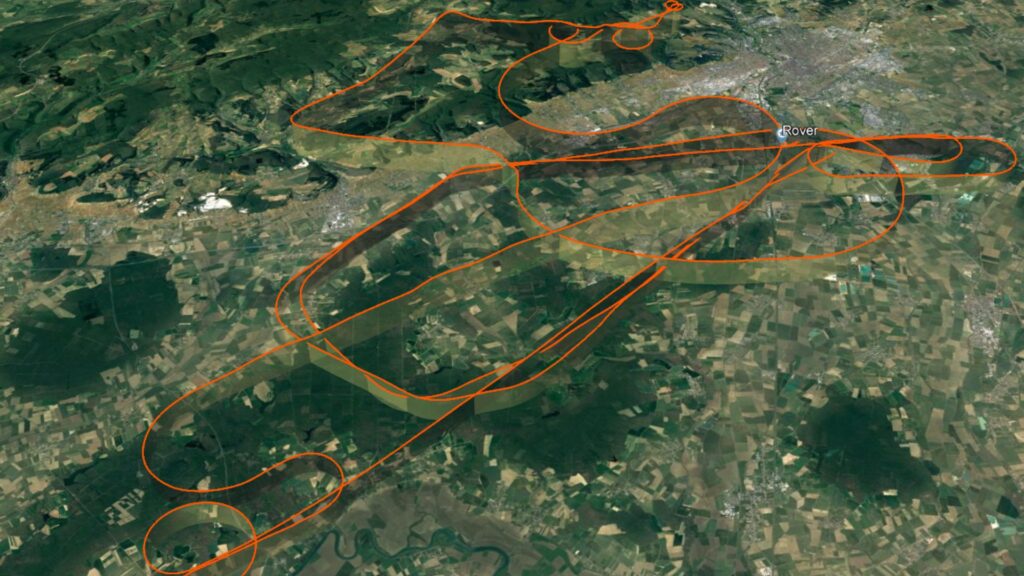
飞行计划由一系列图形组成,例如爬升、标准和急转弯、浅倾斜、纵摇、加速和减速、俯仰向上和向下……
飞行 2:特技飞行
在 Flight 2 中,INS 设备要经过一系列特技飞行,以测试其在极端方向和加速度下的能力。特技飞行以快速和激烈的运动为特征,为空中导航中的导航系统带来了重大挑战。
通过模拟这些严苛的条件,我们可以评估 INS 设备在精确位置至关重要的实际场景中的稳健性和准确性。

飞行计划由一系列图形组成,如爬升、标准和急转弯、浅倾斜、纵摇、副翼滚转、桶滚、4 点滚转、殷麦曼回旋、S 形转弯、加速和减速、俯仰向上和向下……
被测设备
选择用于评估的两个 INS 设备是 Ellipse-D 和 Quanta Micro。Ekinox Micro 也通过 Quanta Micro 进行代理评估。
| 单位 | 硬件代码 | 硬件修订版 | 序列号 | 固件 |
|---|---|---|---|---|
| EUT#1 | ELLIPSE-D-G4A3-B1 | 3.3.00 | 000043763 | 2.5.169-stable |
| EUT#2 | QUANTA-USG | 1.1.0.0 | 000042492 | 4.2.228-beta |
| 通过代理评估 | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
虽然本次测试未包含精确的 Ekinox Micro 硬件,但它是 Quanta Micro 的坚固版本,并且行为完全相同。因此,此测试的结果完全适用于 Ekinox Micro。

参考单元
带有 Qinertia PPK 的 Apogee-D 装置(紧耦合 PPK,具有前向 + 后向处理)用作测试的参考。
测试结果
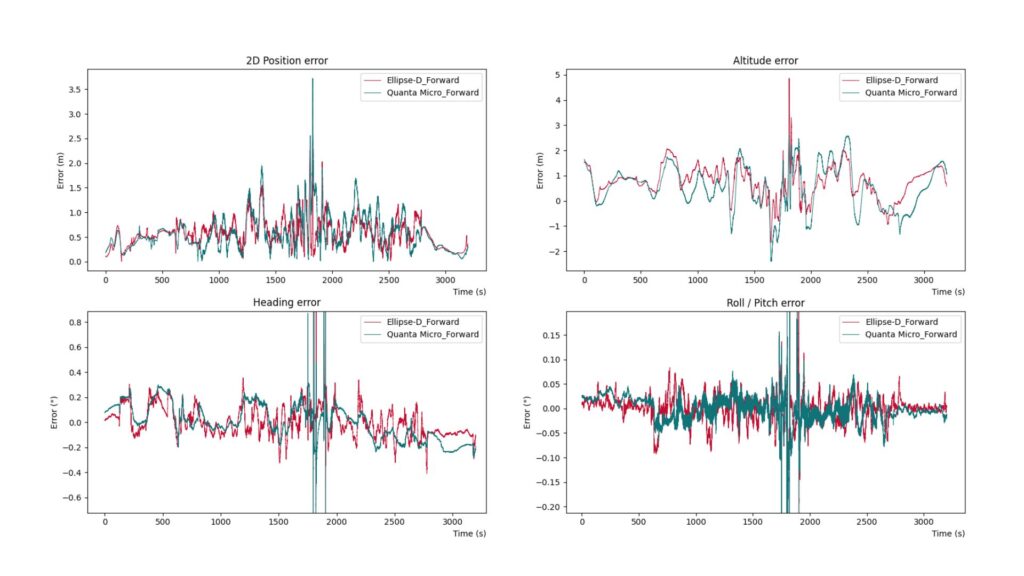
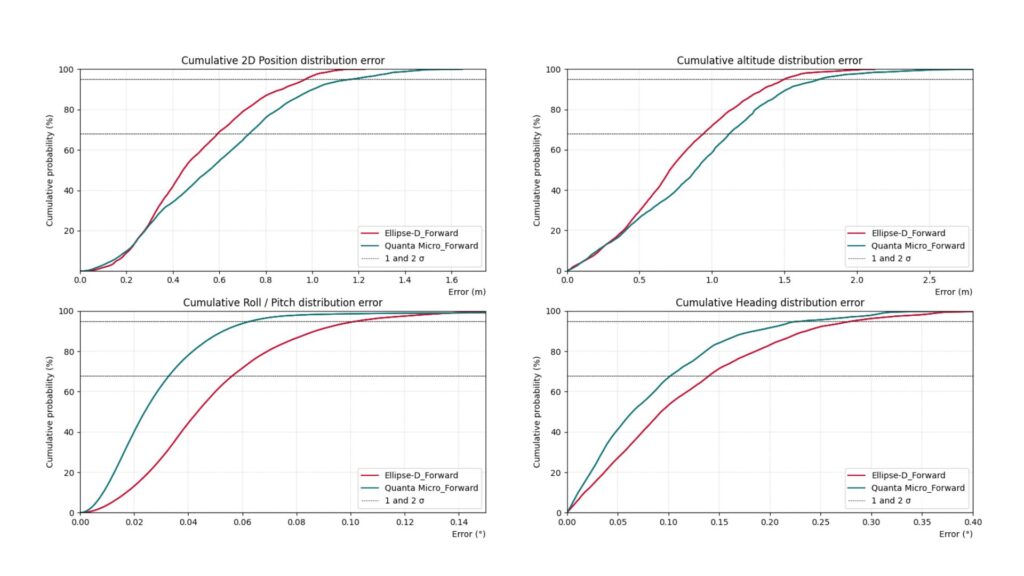
首次测试:典型飞行
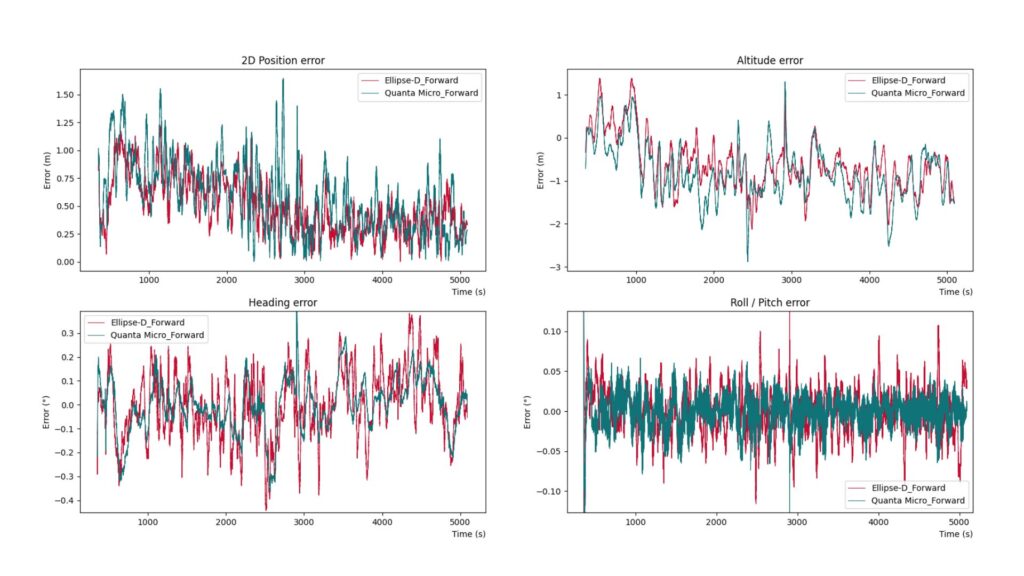
第二次测试:特技飞行
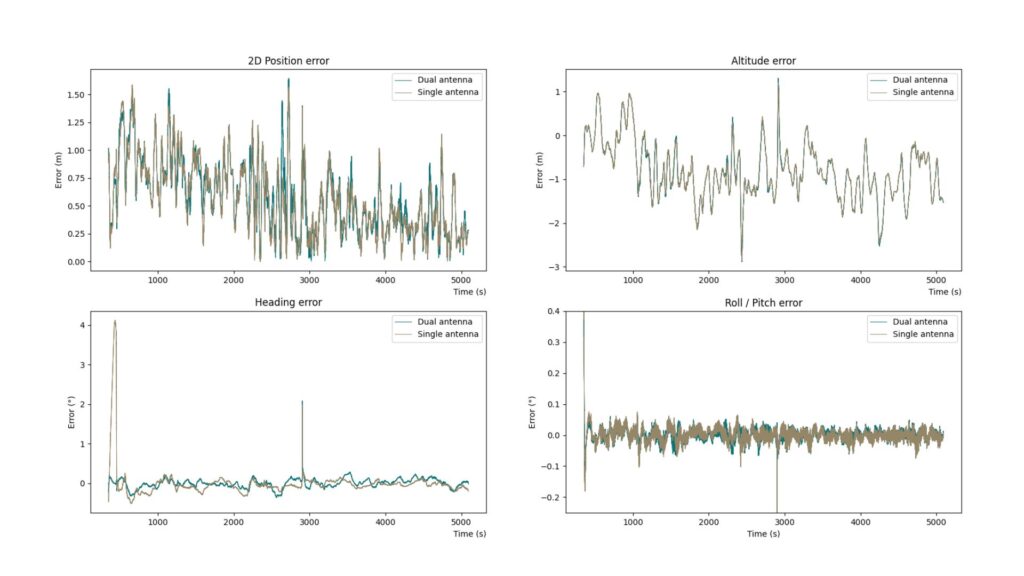
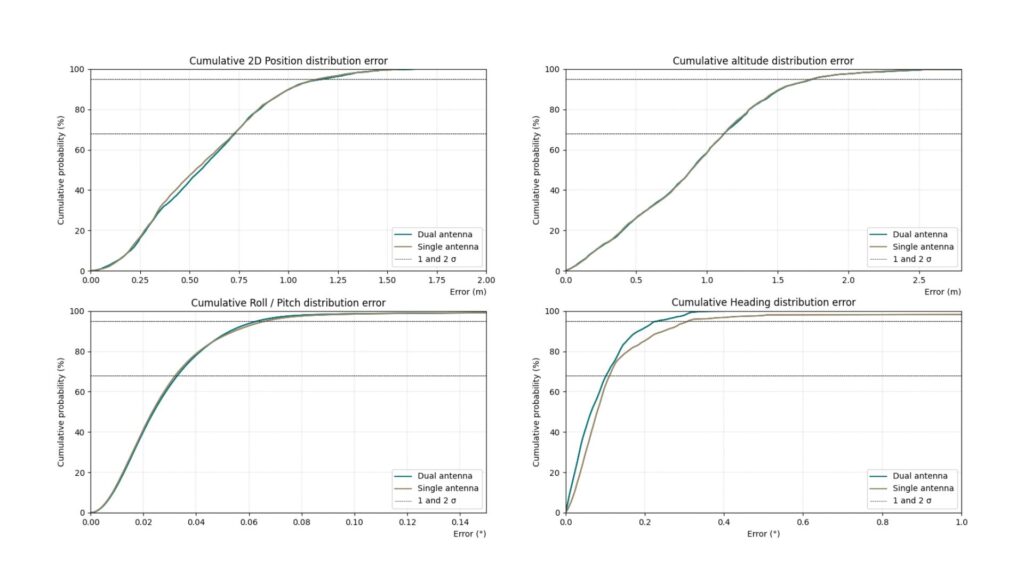
单天线与双天线
下图显示了 Quanta Micro 在单天线与次优双天线设置(具有不同天线类型)中的实时性能。
飞行的开始是超过 7 分钟的低动态直线,没有任何先前的高动态机动。虽然这远未达到最佳条件,但单天线设置运行正常,但误差较高。
这种情况显然有利于双天线设置,即使在低动态条件下也能提供准确的测量结果。
如果将此初始直线从误差分析中排除,我们可以看到单天线性能与双天线性能相当。
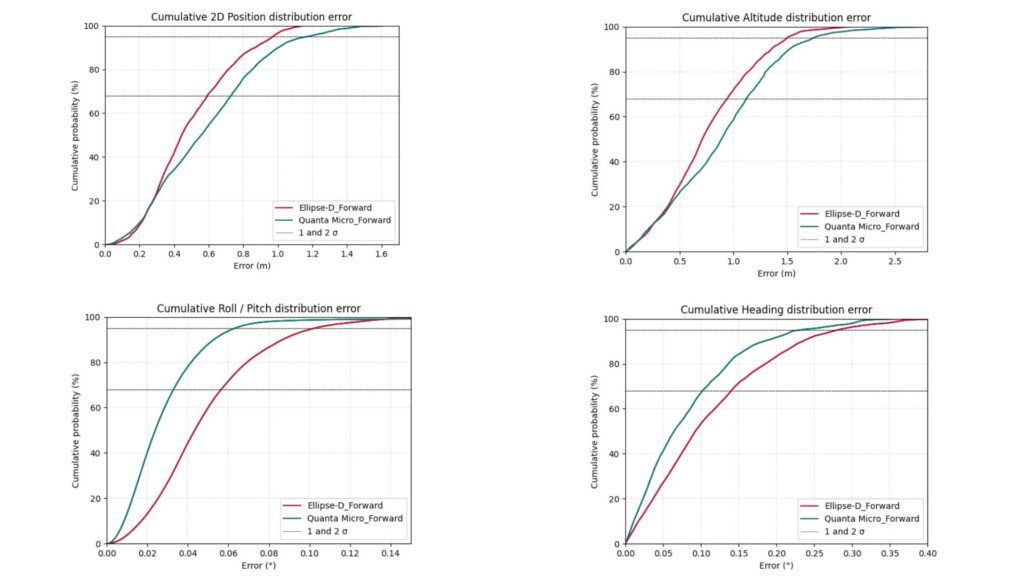
结果分析
Ellipse-D 结果与规格的比较
| 测量 | 目标值 (RMS) | 已实现值,典型飞行 (RMS) | 已实现值,特技飞行 (RMS) | 状态,基于典型飞行 |
|---|---|---|---|---|
| 水平位置 | 1.2 m | 0.574 m | 0.647 m | 确定 |
| 海拔 | 1.5 m | 1.012 m | 1.050 m | 确定 |
| 横滚 | 0.1° | 0.041° | 0.064° | 确定 |
| 俯仰 | 0.1° | 0.041° | 0.043° | 确定 |
| 航向精度 | 0.2° (基线 > 2 m) | 0.147° | 0.127° | 确定 |
顺便提一下,测试中使用的 Ellipse-D 表现出了卓越的性能水平,超出了预期。
虽然我们所有的 IMU 都满足其指定的性能,但有些甚至可能超过它们。Ellipse-D 是这种卓越性能的一个例子,它赢得了“有史以来最好的 Ellipse”的称号,并在我们的货架上占据了特殊的位置。
Quanta Micro / Ekinox Micro 结果与规格的比较
| 测量 | 目标值 (RMS) | 已实现值,典型飞行 (RMS) | 已实现值,特技飞行 (RMS) | 状态,基于典型飞行 |
|---|---|---|---|---|
| 水平位置 | 1.2 m | 0.688 m | 0.689 m | 确定 |
| 海拔 | 1.5 m | 1.204 m | 1.049 m | 确定 |
| 横滚 | 0.03° | 0.023° | 0.049° | 确定 |
| 俯仰 | 0.03° | 0.027° | 0.036° | 确定 |
| 航向精度 | 0.1° | 0.109° | 0.146° | 确定 |
结论
在典型的飞行测试中,Ellipse-D 和 Quanta Micro / Ekinox Micro 在实时单点条件下均超过了其规格。特技飞行测试还表明,Ellipse-D 和 Quanta Micro / Ekinox Micro 提供了卓越的性能,没有出现任何错误,并且与指定值(通常适用于正常飞行条件)紧密一致。
这些测试表明,SBG 的 INS 是在单点条件下用于机载导航应用的高度可靠和准确的工具。它们始终如一地提供出色的性能,从而确保在具有挑战性的场景中的可靠性。
