
La navigazione aerea si riferisce alle tecniche e tecnologie utilizzate per determinare la posizione e la rotta di un aeromobile durante il volo. Una navigazione efficace assicura che un aeromobile raggiunga la sua destinazione in modo sicuro ed efficiente. Ecco alcuni componenti e metodi chiave coinvolti nella navigazione aerea: Sistemi di Navigazione Inerziale (INS), Sistemi Globali di Navigazione Satellitare (GNSS), ecc. Abbiamo preparato un test aereo completo per voi.
C'è una cultura dell'innovazione in SBG Systems, quindi quando è stata formulata l'idea di un volo intenso per valutare le prestazioni dei nostri Ellipse e Quanta Micro in condizioni reali, non c'è stata alcuna esitazione. Ci sono voluti tempo e risorse per realizzare questi test, ma il risultato ne è valsa la pena. Molte grazie ad Apache aviation per il loro aiuto in questo progetto.
I Sistemi di Navigazione Inerziale (INS) svolgono un ruolo cruciale nel fornire informazioni accurate di posizionamento e navigazione per le applicazioni di navigazione aerea. Li abbiamo testati in condizioni reali per valutarne l'affidabilità.

Un'eccezionale campagna di test nella navigazione aerea
Oltre alla complessa implementazione coinvolta nella conduzione di test aerospaziali (normative, spazi ristretti, ecc.), queste prove sono particolarmente eccezionali in quanto ci hanno fornito risposte a determinate domande che pochi produttori di INS hanno avuto l'opportunità di testare in condizioni reali:
- Il nostro obiettivo iniziale era quello di arricchire il nostro database di test, con particolare attenzione al miglioramento continuo dei nostri algoritmi. Molti test vengono tipicamente condotti in un ambiente “2D” (ad esempio, auto, barche), mentre i test “3D” sono relativamente scarsi.
- I clienti con applicazioni aerospaziali raramente forniscono dati, poiché spesso sono riservati.
- Un'altra questione che abbiamo cercato di affrontare è stata la convalida della robustezza dei nostri algoritmi in condizioni dinamiche estreme, comprese vibrazioni significative e accelerazioni superiori a 4g.
- Inoltre, questo ci ha permesso di valutare le prestazioni delle nostre apparecchiature in ambienti GNSS difficili, dove ci sono significative ostruzioni del segnale dovute a bruschi cambiamenti di orientamento o persino inversioni complete dell'aeromobile (volo a testa in giù).
Effetto Gimbal lock
Questi voli ci hanno anche permesso di testare tutti gli orientamenti possibili, alcuni dei quali inducono un effetto di “gimbal lock” che tradizionalmente pone difficoltà per alcuni algoritmi di navigazione quando il pitch si avvicina a 90°. Sebbene i nostri algoritmi siano progettati per gestire questo problema utilizzando i quaternioni, vengono raramente messi alla prova in tali condizioni.
Infine, oltre agli aspetti di robustezza e funzionalità, abbiamo mirato a verificare se le prestazioni di navigazione potessero essere mantenute in queste condizioni estreme.
Vale la pena notare che questi test sono stati condotti alla cieca.
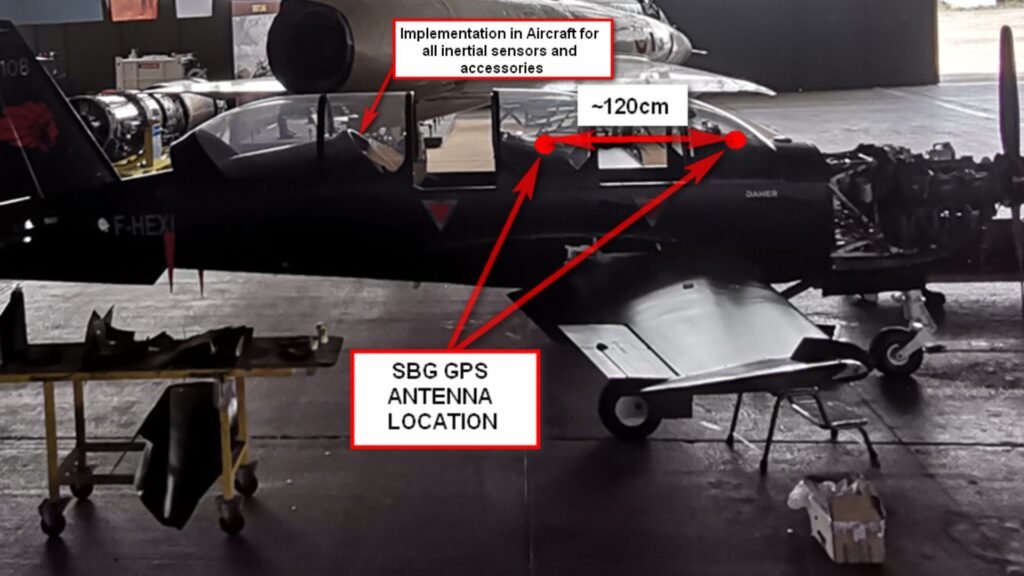
Per motivi di sicurezza, è difficile, se non impossibile, portare a bordo un computer portatile. Con tutti i sensori coinvolti, tutto doveva essere configurato e ricontrollato prima di iniziare i test di volo.
La piattaforma di test doveva essere completamente autonoma per la registrazione dei dati ed era necessaria una batteria con capacità sufficiente per l'intera durata dei preparativi e dei voli. Tutto questo doveva essere integrato in dimensioni molto ridotte.
Configurazione e piano di volo
Per valutare in modo completo le prestazioni dei dispositivi INS, sono stati programmati due voli, ciascuno rappresentante diversi scenari incontrati durante le operazioni di navigazione aerea:
- Un volo tipico, con manovre dinamiche inferiori e condizioni di volo rettilinee e livellate
- Un volo acrobatico, per stimolare i dispositivi in molti orientamenti e accelerazioni
- Questo ci ha permesso di verificare che, sia in condizioni normali che difficili, i prodotti offrano il livello di prestazioni in tempo reale specificato.
Sono stati testati due prodotti: Ellipse-D e Quanta Micro. Un Apogee-D post-elaborato (PPK strettamente accoppiato con elaborazione forward + backward) è servito come riferimento per questa valutazione. E tutti si sono comportati molto bene, molto meglio dell'equipaggio di SBG Systems.
Volo 1: Profilo di volo tipico
L'obiettivo principale del Volo 1 è valutare le prestazioni dei dispositivi in un profilo di volo tipico, che comprende manovre a dinamica inferiore e condizioni di volo livellato e rettilineo.
Questo volo fornisce una base di riferimento per il confronto e valuta la precisione e la stabilità dei dispositivi INS durante le normali operazioni di volo.
I dati raccolti durante questo volo hanno contribuito a stabilire un benchmark per la valutazione delle loro prestazioni in condizioni più impegnative di navigazione aerea.
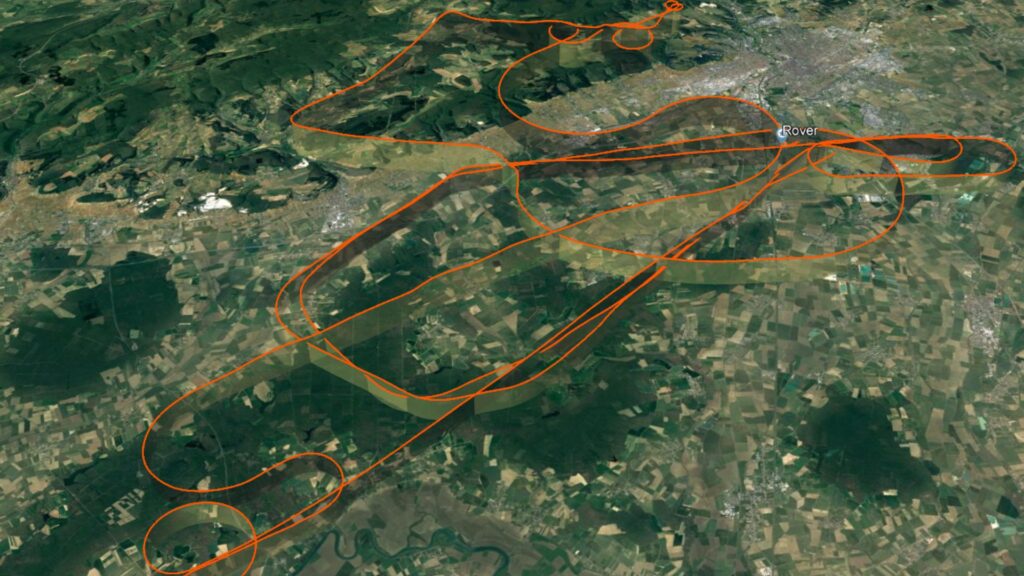
Il piano di volo consiste in una serie di figure come la salita, le virate standard e strette, la virata dolce, la fugoide, le accelerazioni e decelerazioni, il beccheggio verso l'alto e verso il basso...
Volo 2: Manovre acrobatiche
Nel Volo 2, i dispositivi INS sono sottoposti a una serie di manovre acrobatiche per testare le loro capacità in orientamenti e accelerazioni estreme. Le manovre acrobatiche, caratterizzate da movimenti rapidi e aggressivi, introducono sfide significative per i sistemi di navigazione aerea.
Simulando queste condizioni impegnative, possiamo valutare la robustezza e la precisione dei dispositivi INS in scenari reali dove il posizionamento preciso è vitale.

Il piano di volo consiste in una serie di figure come la salita, le virate standard e strette, la virata dolce, la fugoide, il rollio degli alettoni, la tonneau, il rollio a 4 punti, l'immelmann, la curva a S, le accelerazioni e decelerazioni, il beccheggio verso l'alto e verso il basso...
Dispositivi sotto test
I due dispositivi INS scelti per la valutazione sono Ellipse-D e Quanta Micro. Ekinox Micro è valutato anche per procura con Quanta Micro.
| Unità | Codice hardware | Revisione hardware | Numero di serie | Firmware |
|---|---|---|---|---|
| EUT#1 | ELLIPSE-D-G4A3-B1 | 3.3.00 | 000043763 | 2.5.169-stable |
| EUT#2 | QUANTA-USG | 1.1.0.0 | 000042492 | 4.2.228-beta |
| Valutato per procura | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Sebbene l'hardware esatto di Ekinox Micro non sia stato incluso in questo test, è una versione robusta di Quanta Micro e si comporta esattamente allo stesso modo. Pertanto, i risultati di questo test sono interamente applicabili a Ekinox Micro.

Unità di riferimento
L'unità Apogee-D con Qinertia PPK (PPK strettamente accoppiato con elaborazione forward + backward) funge da riferimento per il test.
Risultati dei test
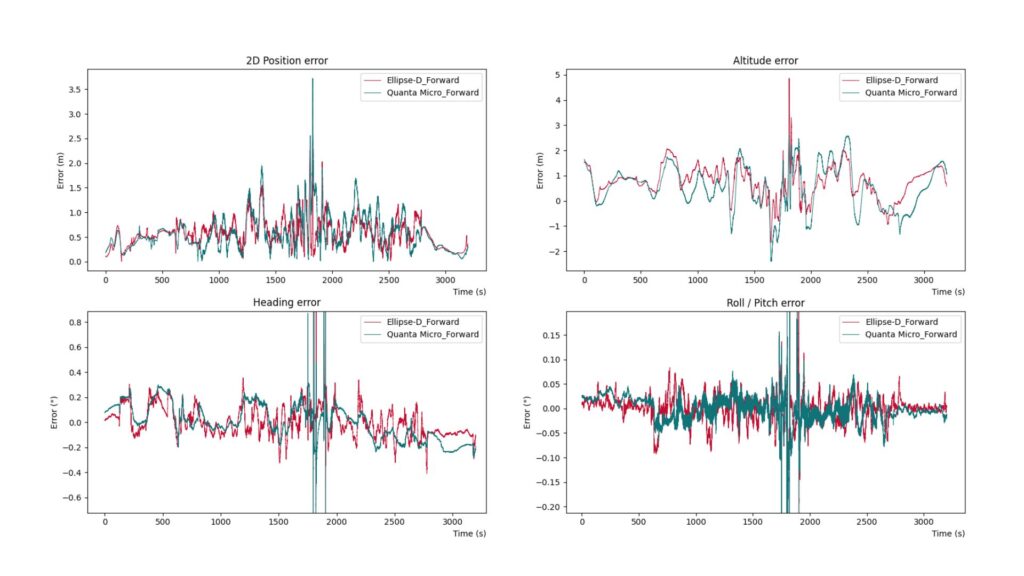
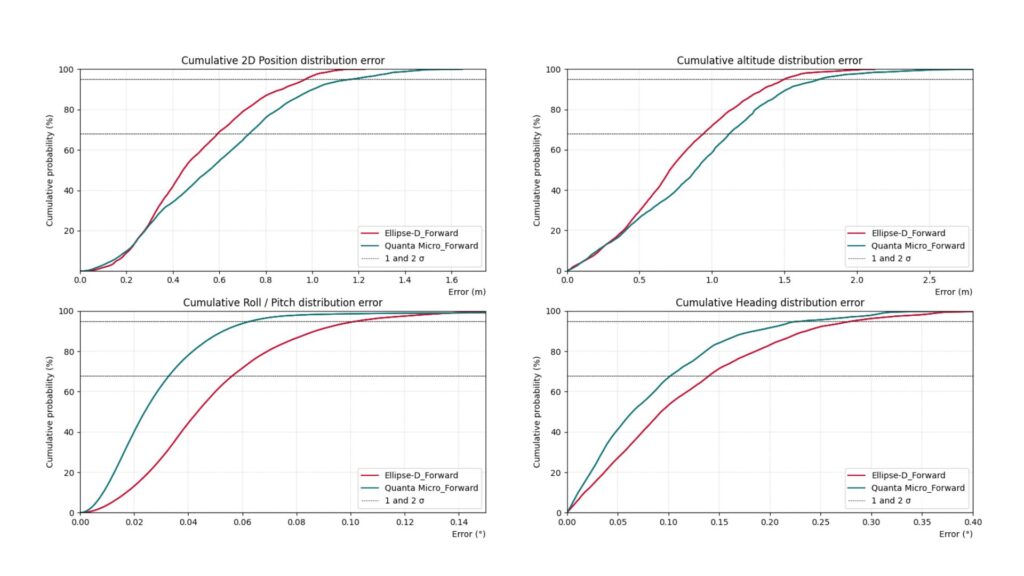
Primo test: volo tipico
Secondo test: volo acrobatico
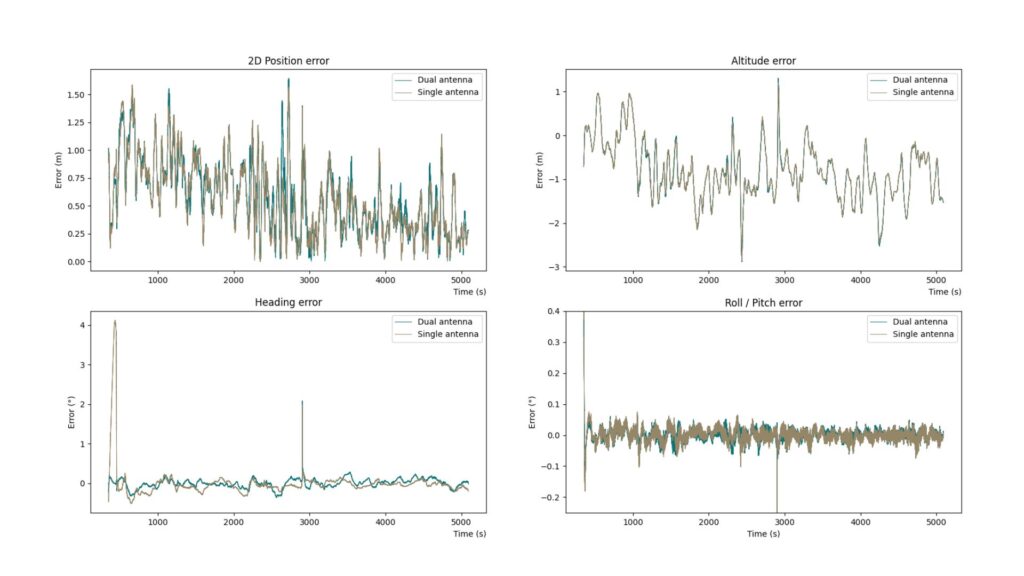
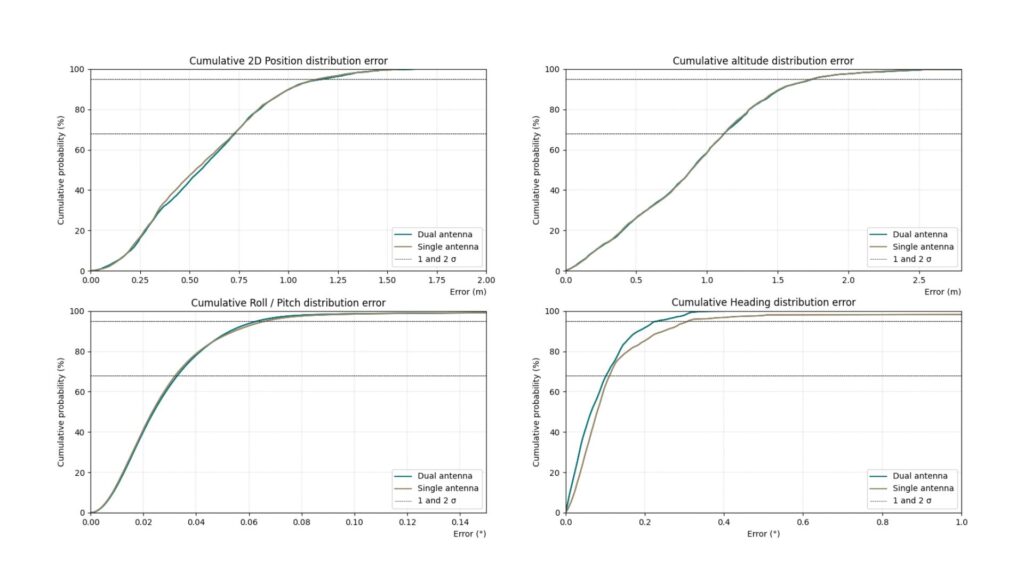
Antenna singola vs doppia
Il grafico sottostante mostra le prestazioni in tempo reale di Quanta Micro in configurazione a singola antenna rispetto alla configurazione sub-ottimale a doppia antenna (con diversi tipi di antenna).
L'inizio del volo è una linea retta a bassa dinamica per più di 7 minuti, senza alcuna precedente manovra ad alta dinamica. Sebbene ciò avvenga in condizioni tutt'altro che ottimali, la configurazione a singola antenna funziona correttamente, con un errore maggiore.
Questo tipo di situazione è chiaramente a vantaggio della configurazione a doppia antenna, in grado di fornire misurazioni accurate, anche in condizioni di bassa dinamica.
Se questa linea retta iniziale viene esclusa dall'analisi degli errori, possiamo vedere che le prestazioni della singola antenna sono equivalenti alle prestazioni della doppia antenna.
Analisi dei risultati
Confronto dei risultati di Ellipse-D con le specifiche
| Misura | Valore target (RMS) | Valore raggiunto, volo tipico (RMS) | Valore raggiunto, volo acrobatico (RMS) | Stato, basato sul volo tipico |
|---|---|---|---|---|
| Posizione orizzontale | 1.2 m | 0.574 m | 0.647 m | OK |
| Altitudine | 1.5 m | 1.012 m | 1.050 m | OK |
| Rollio | 0.1° | 0.041° | 0.064° | OK |
| Beccheggio | 0.1° | 0.041° | 0.043° | OK |
| Heading | 0,2° (baseline > 2 m) | 0.147° | 0.127° | OK |
A margine, l'Ellipse-D utilizzato nel test ha mostrato un livello di prestazioni eccezionale, superando le aspettative.
Sebbene tutte le nostre IMU soddisfino le prestazioni specificate, alcune possono persino superarle. Ellipse-D si distingue come un esempio di tali prestazioni eccezionali, guadagnandosi il titolo di “Best Ellipse Ever” e occupando un posto speciale nel nostro scaffale.
Confronto tra i risultati di Quanta Micro / Ekinox Micro e le specifiche
| Misura | Valore target (RMS) | Valore raggiunto, volo tipico (RMS) | Valore raggiunto, volo acrobatico (RMS) | Stato, basato sul volo tipico |
|---|---|---|---|---|
| Posizione orizzontale | 1.2 m | 0.688 m | 0.689 m | OK |
| Altitudine | 1.5 m | 1.204 m | 1.049 m | OK |
| Rollio | 0.03° | 0.023° | 0.049° | OK |
| Beccheggio | 0.03° | 0.027° | 0.036° | OK |
| Heading | 0.1° | 0.109° | 0.146° | OK |
Conclusione
Durante il tipico test di volo, sia Ellipse-D che Quanta Micro / Ekinox Micro hanno superato le loro specifiche in condizioni di punto singolo in tempo reale. Il test di volo acrobatico ha inoltre rivelato che Ellipse-D e Quanta Micro / Ekinox Micro hanno fornito prestazioni eccezionali, non hanno mostrato errori e si sono allineati strettamente con i valori specificati, che sono solitamente applicabili per condizioni di volo normali.
Questi test evidenziano che gli INS di SBG sono strumenti altamente affidabili e precisi per applicazioni di navigazione aerea in condizioni di punto singolo. Essi offrono costantemente prestazioni eccezionali, garantendo affidabilità in scenari impegnativi.
