
在 "掌握精度 "系列的第一篇文章中,我们将探讨全球导航卫星系统 (GNSS) 及其独立精度,同时考虑到 GNSS 及其误差源。
什么是全球导航卫星系统?
卫星定位系统(如全球定位系统)已经无处不在,为我们的汽车旅行和长途跋涉提供指导。它们在自动驾驶汽车、农业和测量等各种应用中也发挥着至关重要的作用。
然而,重要的是要从 "全球定位系统 "这一术语转向更具包容性的 "全球导航卫星系统"(GNSS),它包括全球定位系统之外的所有卫星星座。
目前有四个全球卫星星座在运行(全球定位系统、格罗纳斯、伽利略、北斗)。此外,还有一些补充星座为当地区域服务,如印度的 IRNSS,或作为全球星座的补充,如日本的 QZSS。
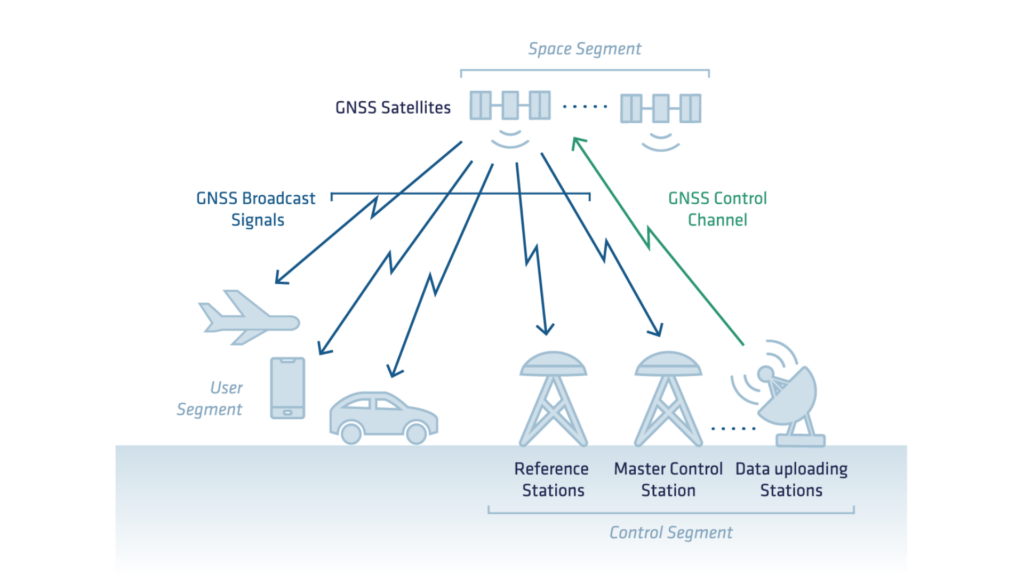
除卫星外,全球导航卫星系统还包括其他重要部分:
- 卫星部分,由卫星星座组成。
- 控制部分,由地面控制站和设备组成。它们负责监测星群,确定卫星位置,并确保卫星持续、正确地运行。
- 用户部分,包括用于根据卫星接收到的信号计算位置的设备。
全球导航卫星系统基本原理:三角测量
要计算位置,系统必须解决四个变量:纬度、经度、高度和时间。这一过程至少需要四颗卫星,但增加卫星可提高精确度和可靠性。
下图说明了三坐标法的工作原理。
第二颗卫星将可能的解决方案缩小到这两个球体的交点。第三颗卫星进一步细化解决方案,使系统能够精确定位。在实际应用中,系统还必须考虑时间因素,这就需要第四颗卫星。
卫星发射的信号
全球导航卫星系统卫星通过不同的频段发射信号,如 L1、L2、L5 等。全球导航卫星系统信号有三个基本组成部分:
- 导航数据(低频):由控制部分计算,该数据包括星历数据(计算卫星位置所需的开普勒轨道参数)、时钟校正数据和补充信息等基本信息。上载到卫星并向全球导航卫星系统接收器全球广播。
- 伪随机噪声码或 PRN 码: 每颗卫星都发射一个独特的伪随机噪声(PRN)码,这是一个由 0 和 1 组成的高频确定性序列,设计有可预测的模式,因此接收器可以复制它。添加 PRN 码的主要优势在于,它允许多颗卫星同时以相同频率发射信号,并能被接收器识别。这种技术被称为码分多址(CDMA),为每颗卫星分配一个唯一的伪随机码。只有 Glonass 使用 FDMA(频分多路存取),每颗卫星的频率略有不同。
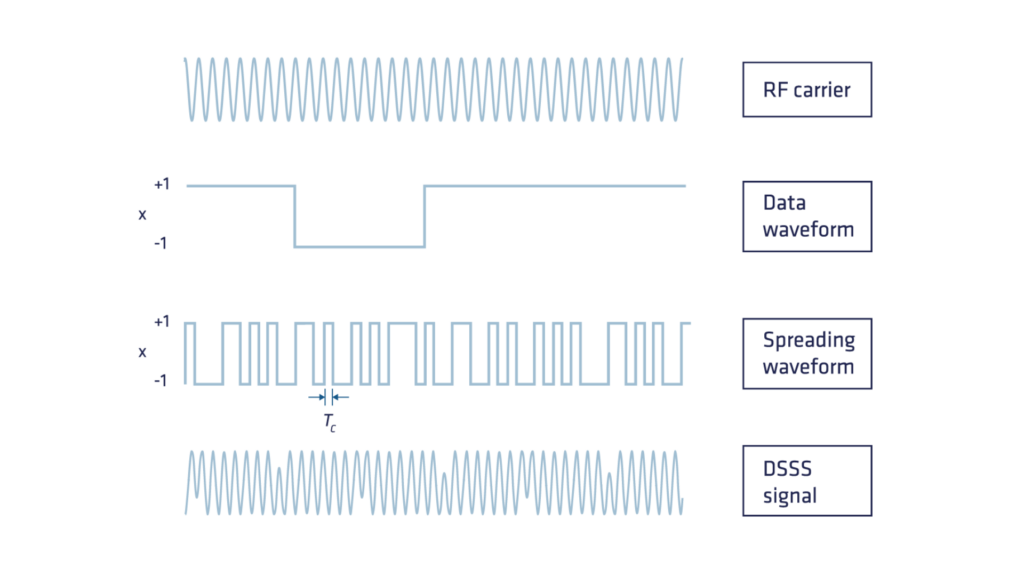
- 射频载波:正弦信号,最初设计用于传输导航数据和PRN 编码的组合信号。稍后我们将看到这一组件如何发展成为 GNSS 信号的基础,从而实现厘米级的定位精度。
测量与卫星的距离:代码和载波相位
最初,GPS 系统是这样设计的:接收机利用 PRN 码复制和自动相关技术计算卫星到接收机的距离,精确度达到亚米级。
载波相位测量虽然更为精确,但在确定卫星与接收机之间的距离时却带来了模糊性。下文将进一步探讨这两种测量方法。
利用 PRN 码计算卫星到接收器的距离
全球导航卫星系统接收器使用一种称为 "延迟锁定环路 "的程序来确定发射代码与接收代码之间的时间延迟。这个时间延迟相当于信号传播时间,然后通过乘以光速转换成距离。
但是,由于接收器和卫星时钟不同步,产生的距离称为伪距。除了时钟同步误差外,伪距还会受到与传播环境(大气、硬件等)有关的其他一些误差的影响,本文稍后将讨论这些误差。
提高卫星到接收器的距离载波相位测量
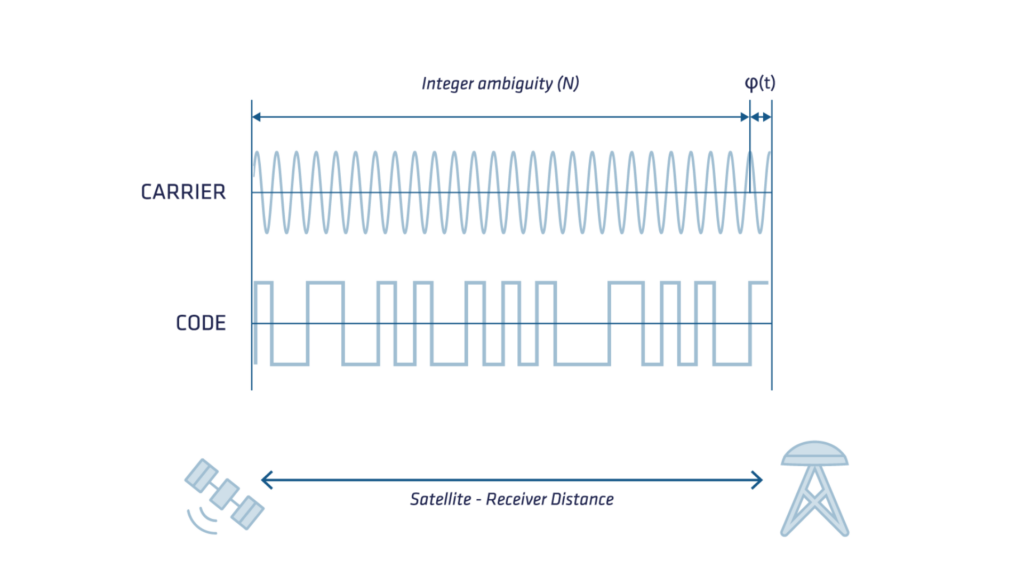
卫星与接收器之间的距离也可通过计算信号发射和接收之间相位周期的次数并乘以载波波长来确定。
这种测量方法比编码精确两个数量级,但周期的未知整数常数(也称为模糊性)会影响其绝对精确度。为了确定载波相位的精确变化,GNSS 接收机将载波中由卫星与接收机相对运动引起的多普勒频移累积起来。
在信号中断的情况下,这一累积过程无法解释实际的运动,测量中会出现突然的跳变,也称为 "周期滑移"。
下图显示了信号载波、编码及其各自的分辨率。
全球导航卫星系统的误差来源
全球定位系统最初的公众(非军事)精度约为 100 米。经过多年的演变(取消选择性可用性、部署新的星座和 SBAS 系统、新的卫星和新的频率),现在独立的全球导航卫星系统的精度从入门级全球导航卫星系统接收器的 5 米到高端接收器的 1 米不等。
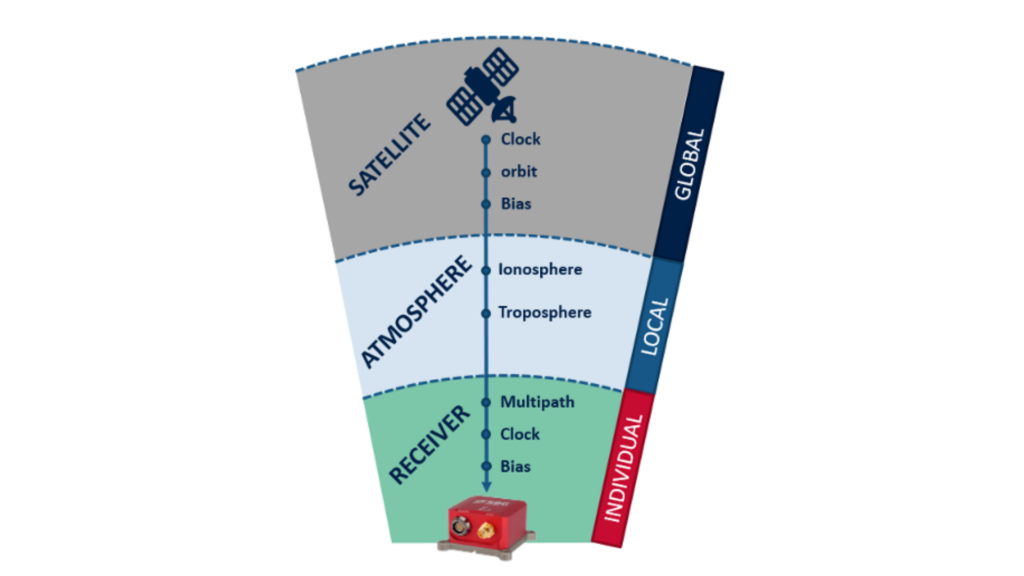
卫星误差
- 时钟误差:虽然全球导航卫星系统卫星上的原子钟非常精确,但也会出现轻微漂移。不幸的是,即使卫星时钟出现轻微偏差,也会导致接收器计算出的位置出现重大偏差。例如,仅 10 纳秒的时钟误差就会转化为 3 米的测距位置误差!
- 轨道误差:虽然全球导航卫星系统卫星遵循高度精确且有据可查的轨道,但这些轨道也会发生细微变化,与卫星时钟类似。与时钟误差一样,即使卫星轨道发生微小变化,也会导致计算位置出现重大误差。轨道的残余误差持续存在,导致潜在的位置误差高达±2.5 米。
大气误差
- 电离层延迟:电离层位于地球上空 50 至 1,000 公里处,其中的带电离子会影响无线电信号的传输,导致位置误差(通常为 ±5 米,电离层活动频繁时误差更大)。电离层延迟随太阳活动、白天、季节和地点而变化,因此预测具有挑战性。
- 对流层延迟:地球的直接大气层--对流层,由于湿度、温度和大气压力的变化,会出现延迟变化。
接收器误差
与卫星原子钟相比,接收器的内部时钟精度较低,加上其他硬件和软件误差,会给测量结果带来噪音和偏差。
| 延迟 | 起源 | 幅度 |
|---|---|---|
| 位置误差 | 卫星 | 5m |
| 计时员 | 卫星 | 0-300 公里 |
| 器乐延迟 | 卫星 | 1-10 m |
| 相对论效应 | 卫星 | 10 m |
| 电离层延迟 | 路径(50-1000 公里) | 2-50 m |
| 对流层延迟 | 路径(0-12 公里) | 2-10 m |
| 瞬时延迟 | 接收器 | 1-10 m |
| 时钟偏移 | 接收器 | 0-300 公里 |
定位计算还应考虑本文未列出的许多其他误差项,如潮汐效应和相对论效应。各种误差源会影响提供高精度定位、导航和授时的全球导航卫星系统技术的性能。 大气延迟、卫星时钟和星历误差、多径干扰和接收器噪声等因素都会降低精度。虽然现代校正技术(差分 GNSS、RTK 和 PPP)有助于减少 GNSS 及其误差源,但了解误差源对于优化 GNSS 性能仍然至关重要。 随着信号处理、传感器融合和机器学习的不断发展,GNSS 系统将变得更加强大,从而确保在各种应用中实现更高的可靠性。