Наші інерційні навігаційні системи пройшли випробування під час триденної гідрографічної зйомки в акваторії порту Гамбурга (Німеччина). SBG Systems MacArtney Germany GmbH оснастили дослідницьке судно повною комплектацією багатопроменевого ехолота та провели низку випробувань, щоб продемонструвати ефективність інерційних систем SBG у різних складних умовах. Дізнайтеся більше про наші випробування з морської батиметрії.
Умови випробувань
Спочатку необроблені INS реєструвалися в режимі реального часу та об'єднувалися з даними МБЕС, отриманими за допомогою пристрою RESON SeaBat 7125, у програмному забезпеченні для збору даних Teledyne PDS. Згодом гідрографічні дані були піддані постобробці та фільтрації за допомогою BeamWorx AutoClean.
Крім того, INS були оброблені за допомогою програмного забезпечення SBG PPK Software Qinertia. Нарешті, еталоном є тісно інтегроване висококласне волоконно-оптичне рішення Horizon.
Ми дякуємо компанії MacArtney Germany за допомогу в проведенні цього морського батиметричного тесту.
Процедура калібрування батиметричного тесту на морі
Калібрування на основі даних про рух і траєкторію руху судна SBG Horizon під час морських батиметричних випробувань.
Інтерфейс містить лінію зйомки, обчислені дані батиметрії, шари, що вказують на якість, та топографічні об’єкти.
Протоколи та результати калібрування
Інерційні навігаційні системи SBG пройшли випробування під час триденної гідрографічної зйомки в Гамбурзі, Німеччина. Крім того, SBG Systems MacArtney Germany GmbH обладнали гідрографічне судно повною комплектацією багатопроменевого ехолота для оцінки INS у складних умовах.
Серед випробуваних датчиків були Horizon, Apogee, Ekinox серіяNavsight ) та Ellipse. Команда зареєструвала необроблені INS дані в режимі реального часу та об'єднала їх з даними MBES від Reson SeaBat 725 за допомогою Teledyne PDS.
Згодом вони провели постобробку та фільтрацію гідрографічних даних за допомогою Beam Worx AutoClean, тоді як Qinertia займалася обробкою INS . Крім того, програмне забезпечення GIS створило 3D-моделі та інтерактивні веб-карти, відображаючи батиметричні розрахунки INS та шари якості. Для форматування макетів використовувався JavaScript. Оцінка охоплювала результати калібрування, батиметричні дані, траєкторії та показники якості, зосереджуючись на характеристиках руху та позиціонування.
Кожне морське батиметричне випробування включало обстеження під мостами та в каналах з GNSS та операціями в умовах сильного хвилювання. Крім того, у дослідженні було проаналізовано поліпшення результатів обстеження завдяки слабкому та тісному поєднанню постобробки необроблених INS .
1 – Поле калібрування датчика руху
Забезпечення високої точності вимірювання руху починається з ретельного калібрування. Наші інерційні датчики проходять всебічні випробування для корекції похибок, коефіцієнтів масштабування та нерівномірності. Завдяки використанню сучасних багатоосьових платформ та контрольованих умов цей процес підвищує точність і стабільність датчиків у широкому діапазоні умов експлуатації. Завдяки точній настройці характеристик кожного датчика калібрування забезпечує надійну роботу в складних умовах, таких як авіакосмічна, морська та автономна навігація.
3D-модель
3D-візуалізація району зйомки для калібрування датчика руху на основі даних про рух і траєкторію руху SBG Horizon. Інтерфейс містить лінію зйомки, розраховану батиметрію, шари, що вказують на якість даних, та топографічні об’єкти.
3D-карта місцевості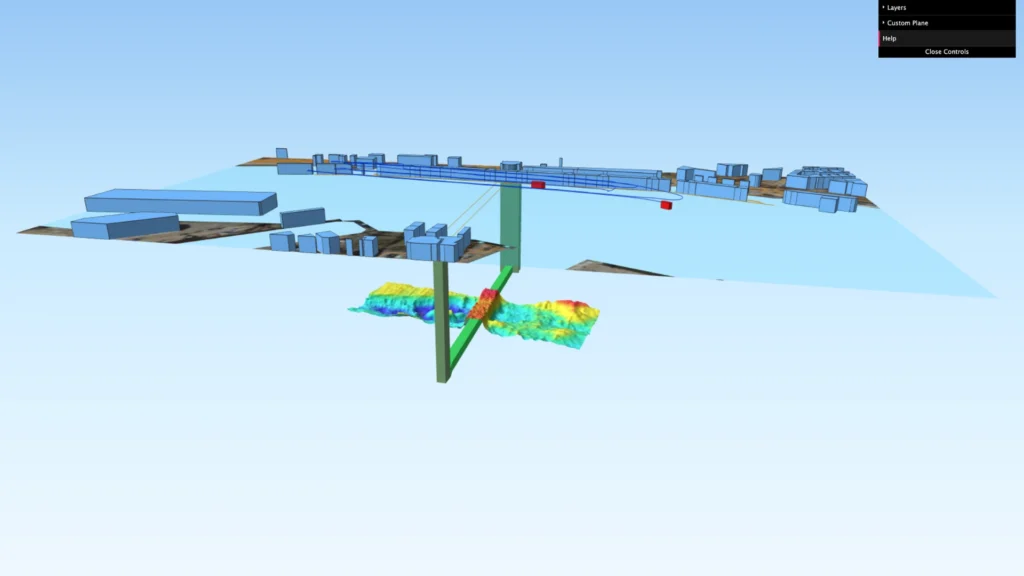
Протоколи калібрування/поправки
Протоколи калібрування та рекомендовані кути установки для кожної інерційної системи SBG. Усі ці звіти формуються за допомогою програмного забезпечення для калібрування BeamworX Autopatch. Під час вимірювальних робіт з вирівнювання команда виміряла відхилення для кожного датчика з урахуванням конфігурації судна та розміщення датчиків, а потім проаналізувала їх за допомогою методу Кремера-Каплана.
Випробування системи точного позиціонування
Випробування нового режиму обробки PPP у програмі Qinertia. Батиметричні поверхні та шари якості були розраховані на основі INS у режимах RTK (у реальному часі) та PPP (пост-обробка).
2 – Інерційні випробування
Інерційні датчики проходять ретельні випробування в контрольованих умовах, щоб забезпечити високу точність і надійність. Під час цих випробувань оцінюються ключові показники ефективності, такі як стабільність зміщення, точність коефіцієнта масштабування, рівні шуму та динамічна реакція. Моделюючи реальні умови, зокрема коливання температури та профілі вібрації, інженери перевіряють стійкість і точність датчика. У підсумку, завдяки всебічним випробуванням інерційних датчиків, виробники гарантують їхню оптимальну роботу в критично важливих сферах застосування, таких як оборонна промисловість, авіакосмічна галузь та автономні системи.
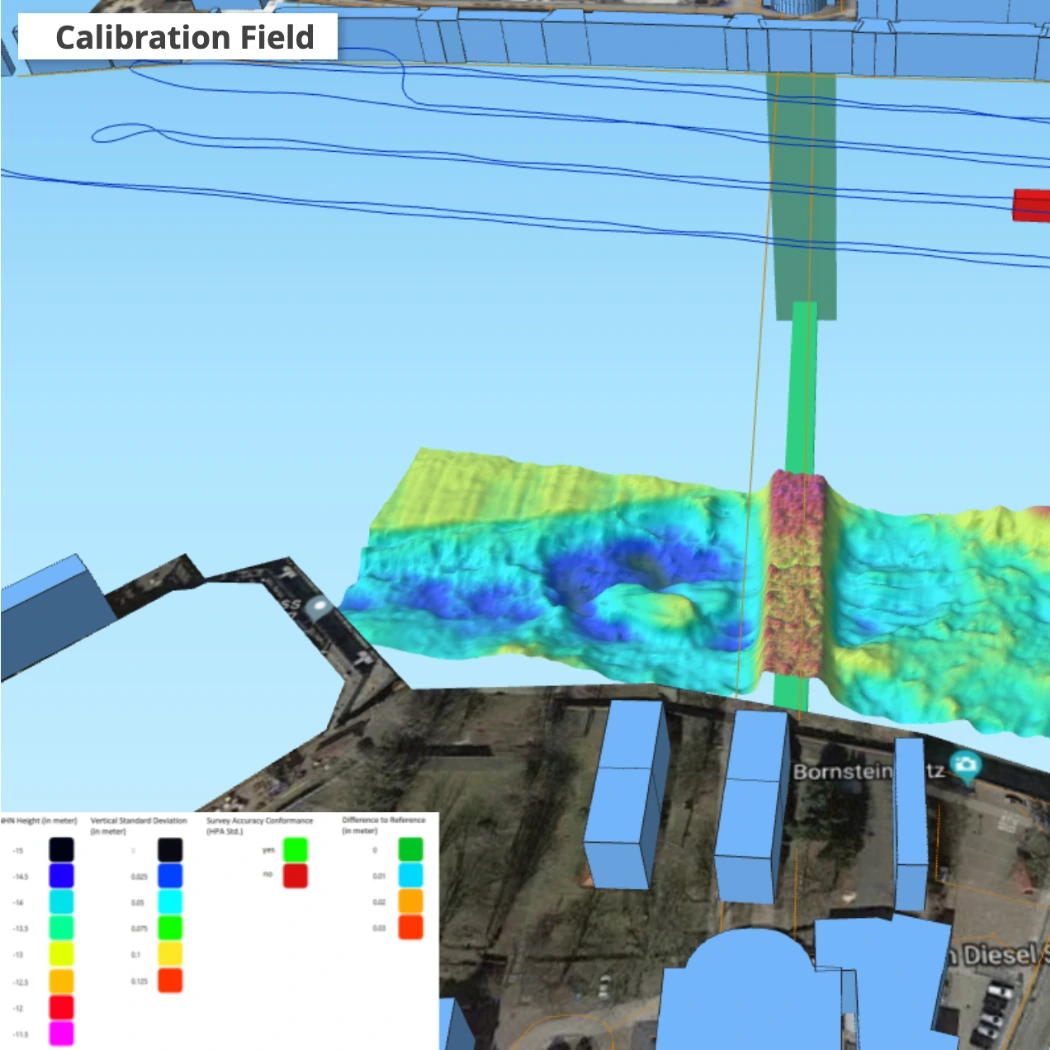
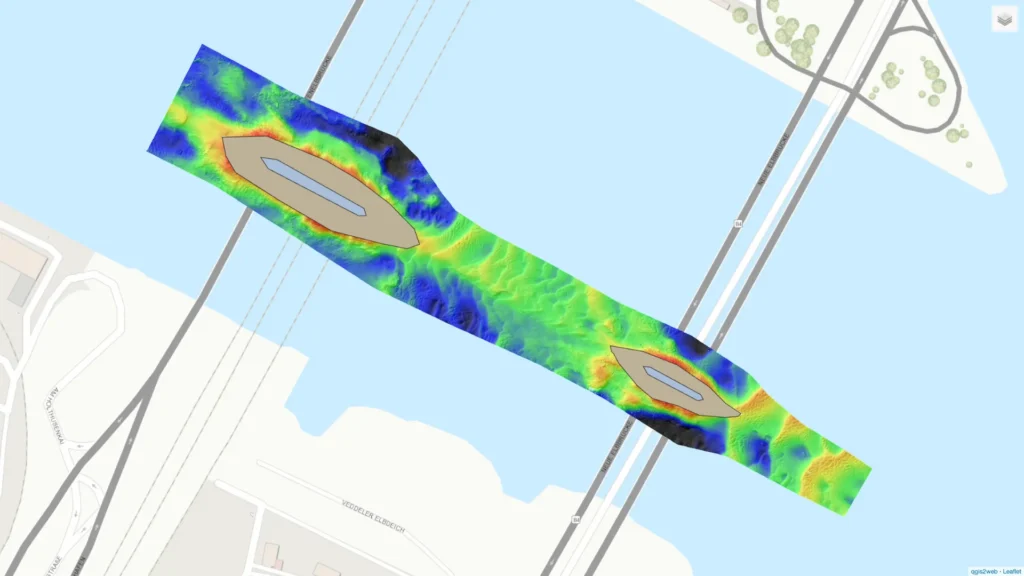
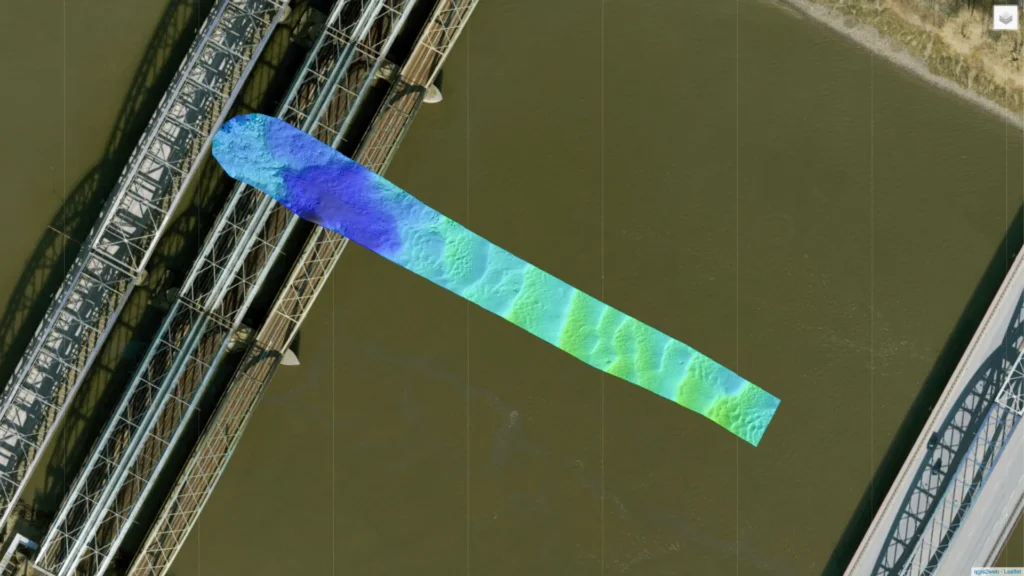
Карта веб-сайту Elbbrücken
Веб-карта поверхні річки Ельби вздовж опор мостів через Ельбу, показники якості батиметричних даних та траєкторії. В якості еталону для поверхонь різниці використовується тісно пов'язане рішення Horizon. Для порівняння використовується високотехнологічна волоконно-оптична система.
3D-модель Ельббрюккена
3D-візуалізація батиметрії під мостами через Ельбу в Гамбурзі на основі даних про траєкторію руху судна SBG Horizon. На карті відображено лінію зйомки, розраховану батиметрію, шари, що вказують на якість даних, та топографічні об’єкти.
3D-модель Ельббрюккена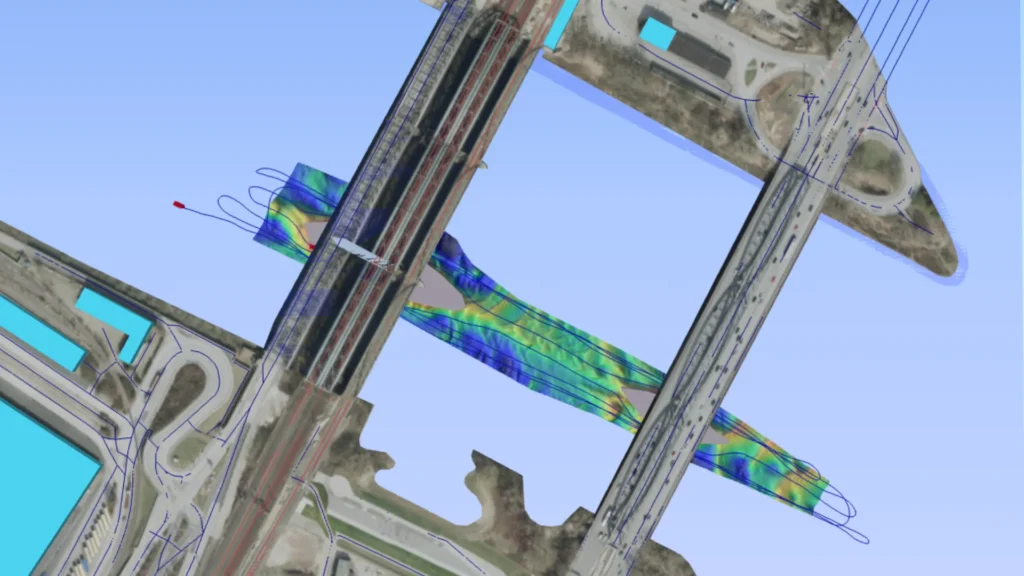
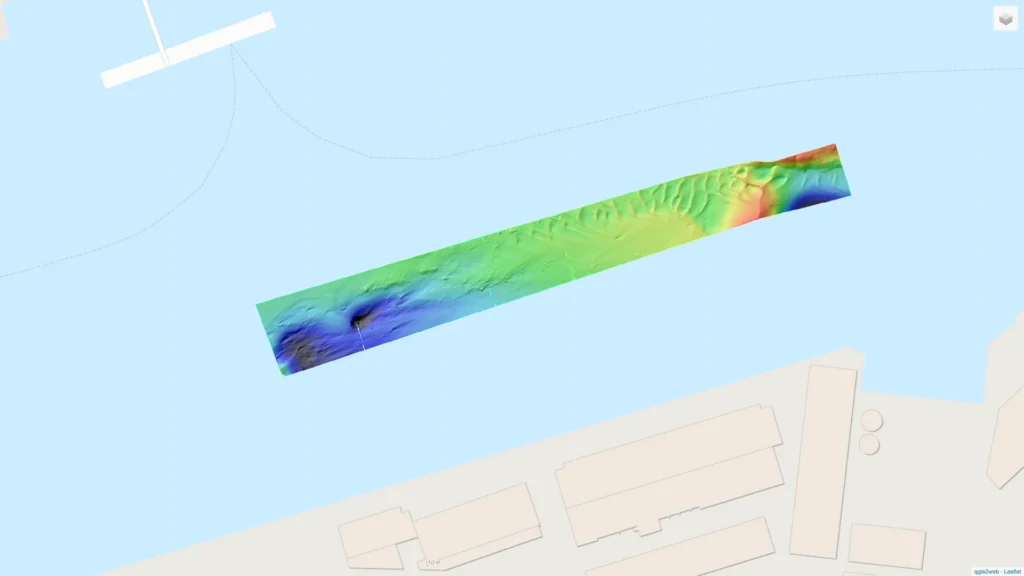
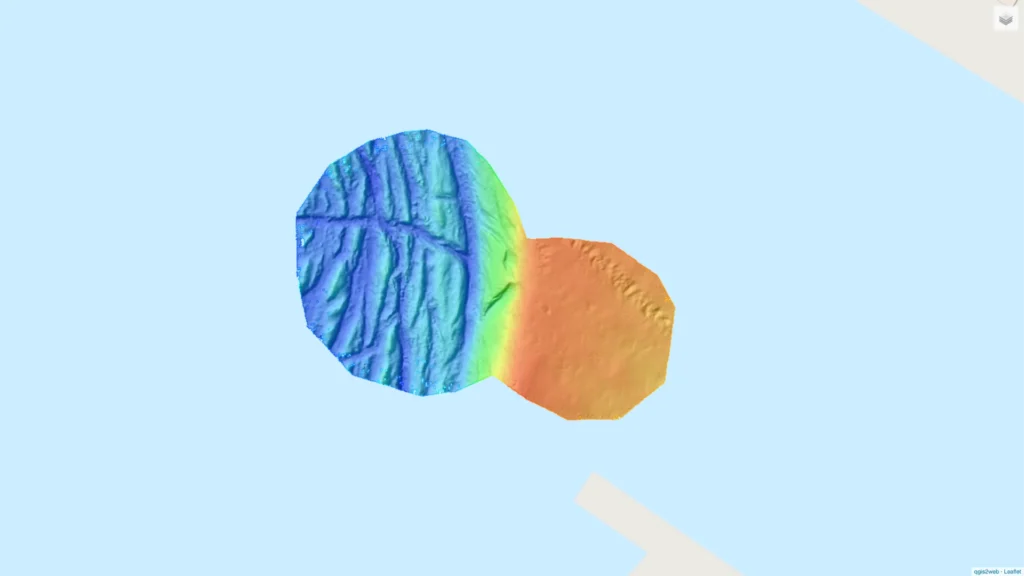
Карта району Шпайхерштадт
Веб-карта поверхні річки Ельби вздовж каналів Шпайхерштадта з показниками якості батиметричних даних та траєкторіями. В якості еталону для поверхонь різниці використовується тісно пов’язане рішення Horizon. В якості порівняльного датчика використовується високотехнологічна волоконно-оптична система.
Канали батиметричної 3D-моделі Шпайхерштадта
3D-візуалізація батиметрії вздовж каналів Шпайхерштадта на основі даних про траєкторію руху судна SBG Horizon. Інтерфейс містить лінію зйомки, розраховану батиметрію, шари, що вказують на якість даних, та топографічні об’єкти.
3D-модель Шпайхерштадта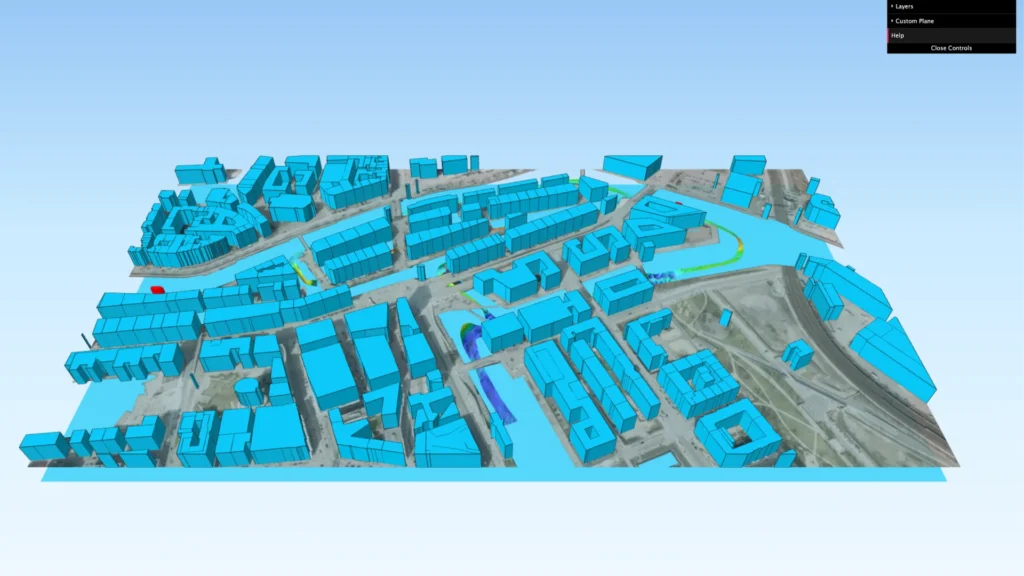
Карта веб-сайту «Поворот на 180° під мостом»
Веб-карта поверхні річки Ельби вздовж мостів через Ельбу з показниками якості батиметричних даних та траєкторіями. Зйомка включає повний поворот на 180° під час повної втрати сигналу RTK. В якості еталону для поверхонь різниць та системи порівняння використовуються дані, оброблені за допомогою волоконно-оптичного датчика.
3 – Випробування на рух
Ці випробування імітують реальні умови експлуатації, дозволяючи оцінити роботу обладнання в різних умовах, таких як різке прискорення, вібрації та обертальні рухи. Аналізуючи дані датчиків, ми вдосконалюємо алгоритми калібрування та компенсації, щоб забезпечити максимальну точність у найскладніших умовах експлуатації.
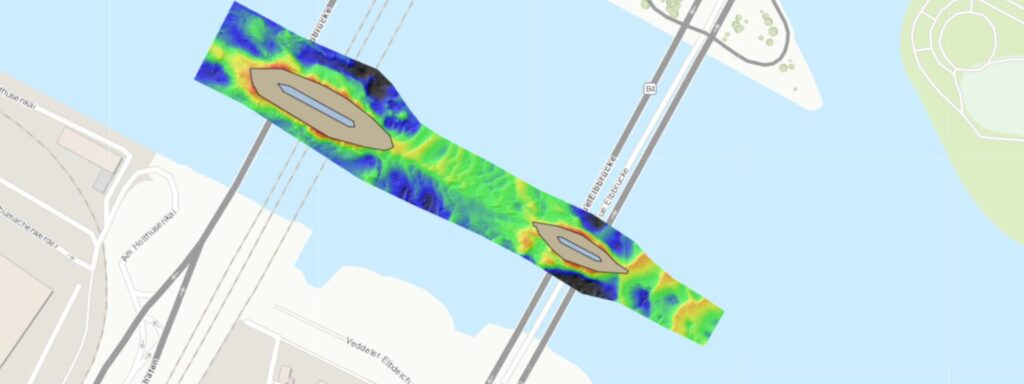
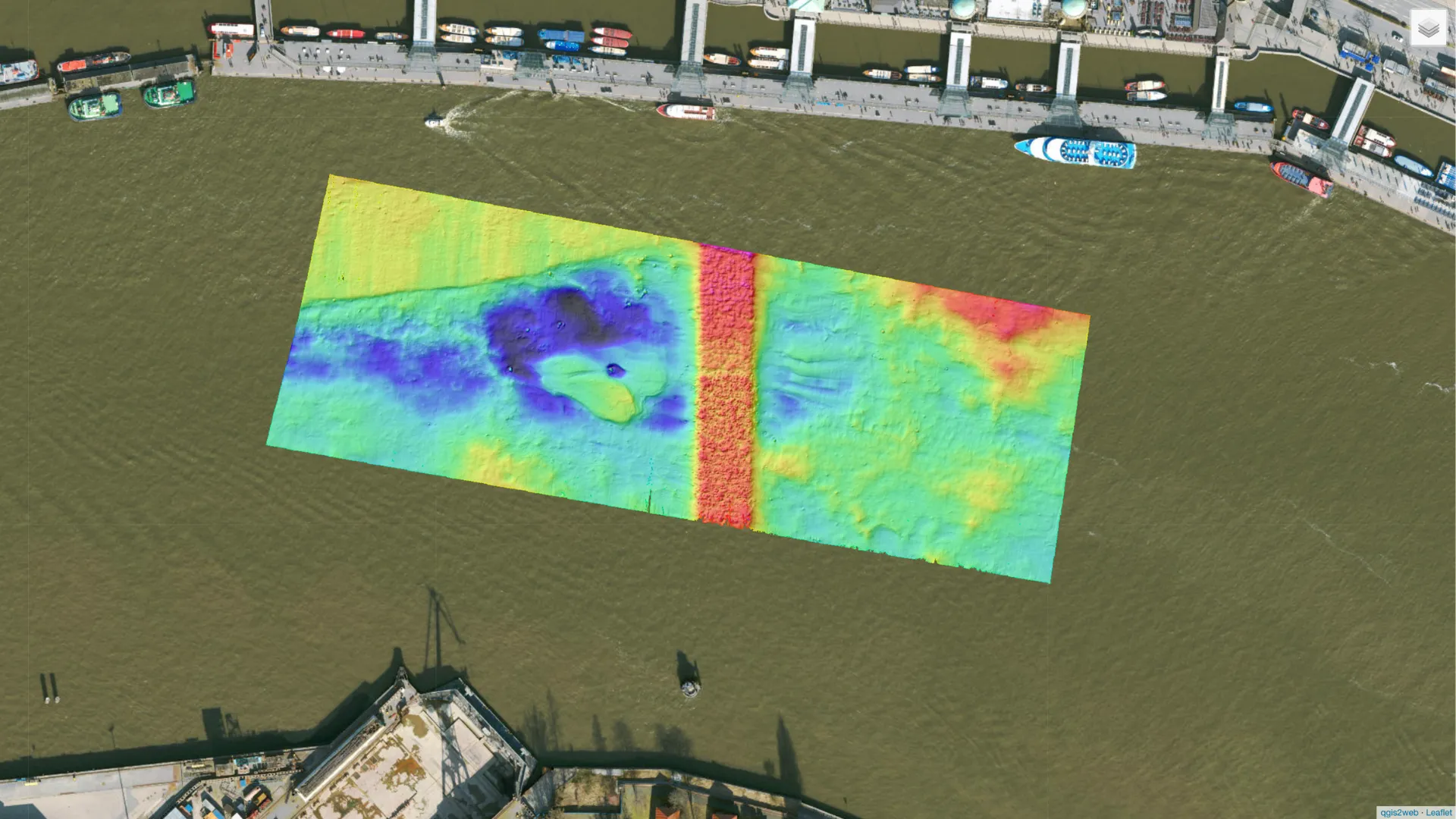
Веб-карта гамбурзьких доків
Веб-карта поверхні річки Ельби поблизу доків Гамбурзького порту, показники якості батиметричних даних та траєкторія руху. Під час цього випробування було зафіксовано динамічні моделі руху, спричинені хвилями, що утворювалися внаслідок проходження суден повз досліджуване судно. В якості еталону для поверхонь різниць використовується система волоконно-оптичних датчиків, що працює в режимі реального часу.
3D-модель гамбурзьких доків
3D-візуалізація батиметрії річки Ельби поблизу доків Гамбурзького порту на основі даних про траєкторію руху судна SBG Horizon. На карті відображено лінію зйомки, розраховану батиметрію, шари, що вказують на якість даних, та топографічні об’єкти.
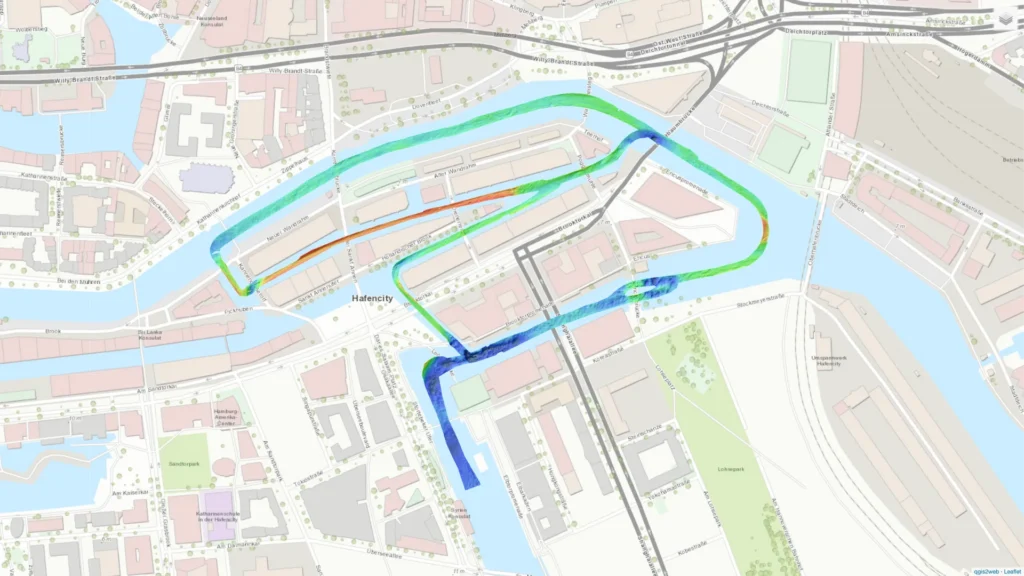
Веб-карта Гамбурзького порту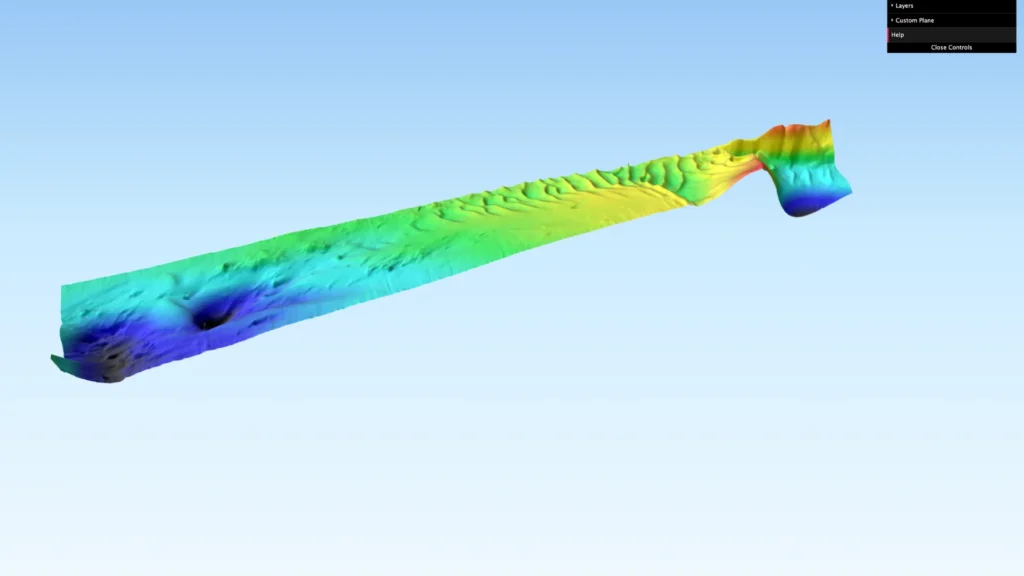
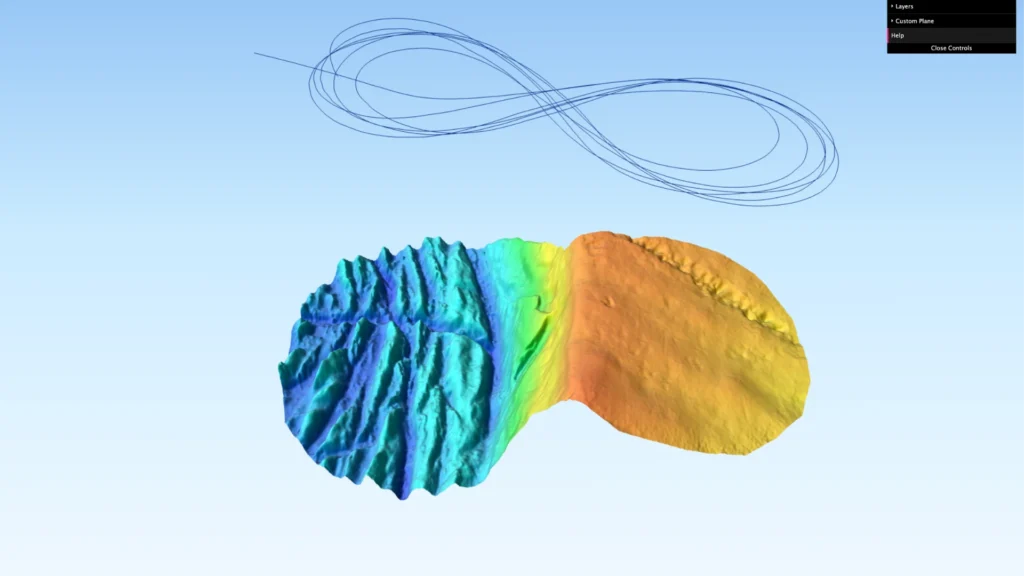
8-значний heading
Веб-карта поверхні річки Ельби під час маневру «8-ка» з показниками якості батиметричних даних та траєкторією. Цей маневр є визначальним, зокрема, для оцінки heading датчиків під час морських батиметричних випробувань. В якості еталону для поверхонь різниці використовується система волоконно-оптичних датчиків, що працює в режимі реального часу.
8-фігурна heading -модель
3D-візуалізація батиметрії річки Ельби під час маневру «8-ка», створена на основі даних про траєкторію судна SBG Horizon. Інтерфейс містить лінію зйомки, розраховану батиметрію, шари, що вказують на якість даних, та топографічні об’єкти.
Веб-карта 3D-моделі зйомки