
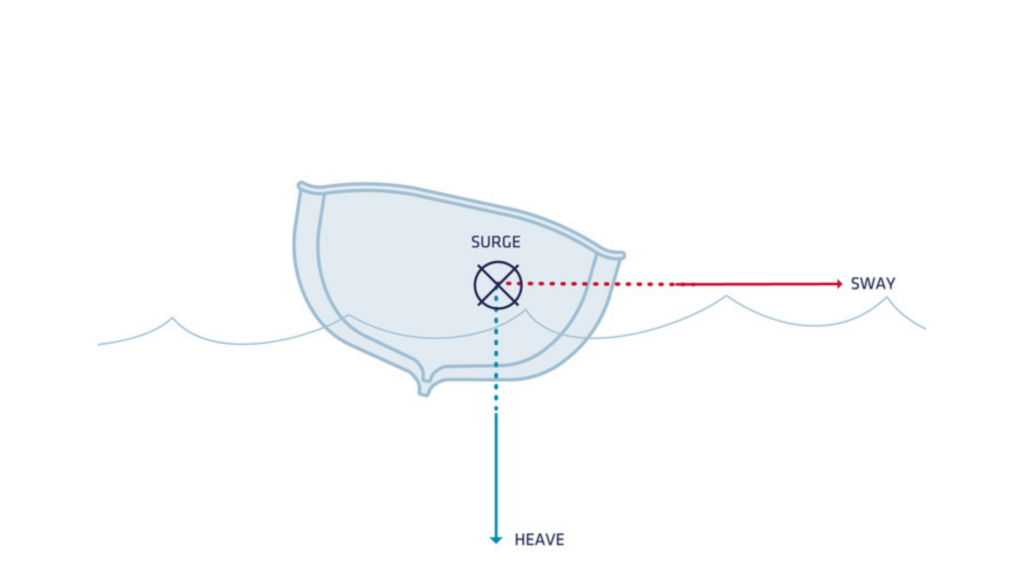
Heave to pomiar ruchu bardzo specyficzny dla zastosowań morskich. Odnosi się do ruchu w górę i w dół statku spowodowanego działaniem fal, mierzonym jako przemieszczenie liniowe wzdłuż lokalnej osi pionowej, przy założeniu średniej wartości zero w środku ciężkości statku.
Wprowadzono znaczące ulepszenia do naszych algorytmów heave w czasie rzeczywistym i opóźnionym.
Aby uzyskać więcej informacji na temat naszego algorytmu heave i sposobu jego prawidłowej konfiguracji, odwiedź stronę bazy wiedzy w naszym Centrum Wsparcia.
Najnowsze osiągnięcia
Nasze obecne algorytmy kompensacji kołysania w czasie rzeczywistym i z opóźnieniem są już liderami w branży i mają najlepsze specyfikacje. Wprowadziliśmy jednak znaczące ulepszenia, aby jeszcze bardziej poprawić ich dokładność. Najnowsze udoskonalenia, wprowadzone w wersji oprogramowania układowego 5.1, wykorzystują odległość od środka obrotu (COR) do IMU (Inertial Measurement Unit), co skutkuje następującymi korzyściami dla algorytmów kompensacji kołysania w czasie rzeczywistym i z opóźnieniem:
- Zwiększona wydajność:
- Dokładność kompensacji kołysania w czasie rzeczywistym poprawiona z 5 cm do 4 cm.
- Dokładność kompensacji kołysania z opóźnieniem poprawiona z 2,5 cm do 2 cm.
- Elastyczna instalacja IMU: IMU można teraz zainstalować w dowolnym miejscu na statku, pod warunkiem podania odległości do COR. Jest to znaczące ulepszenie w porównaniu z poprzednimi wersjami, które wymagały umieszczenia IMU w pobliżu COR statku, co stanowiło wyzwanie dla większych jednostek.
- Lepsza praca w trudnych warunkach morskich: pełna wydajność jest utrzymywana nawet w trudniejszych warunkach na morzu.
Kwalifikacja nowych algorytmów
Kwalifikacja wydajności kompensacji kołysania jest z natury trudna, zwłaszcza gdy celem jest wysoka dokładność. Oto, jak do tego podeszliśmy:
Proces oceny
Przeprowadziliśmy wiele ocen, w tym porównania zbiorów danych batymetrycznych uzyskanych z powtarzanych przejść nad tym samym obszarem dna morskiego. Oceny te zostały ułatwione przez naszego klienta i partnera, firmę Norbit.
- Oceny batymetryczne: porównując kilka linii pomiarowych na tym samym obszarze, ustaliliśmy górną granicę wydajności kompensacji kołysania. Metoda ta uwzględnia błędy całego łańcucha akwizycji, w tym błędy pozycji i pomiarów kątowych z INS, sonaru wielowiązkowego i innych źródeł.
- Weryfikacja w post-processingu: przetestowaliśmy również nasz nowy algorytm kompensacji kołysania z opóźnieniem, wykorzystując dane GNSS po przetworzeniu w Qinertia. Wyniki pokazały, że nowy algorytm działa porównywalnie do RTK.
Wyniki i wnioski
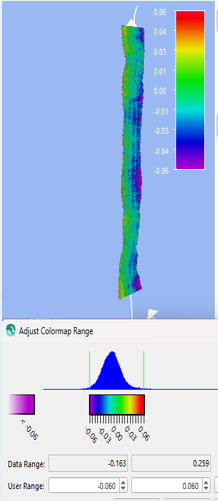
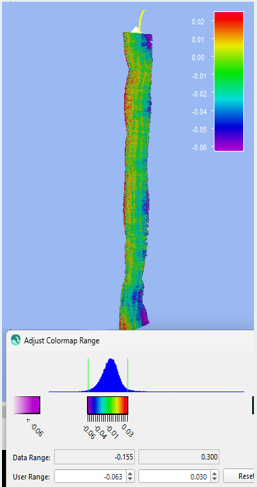
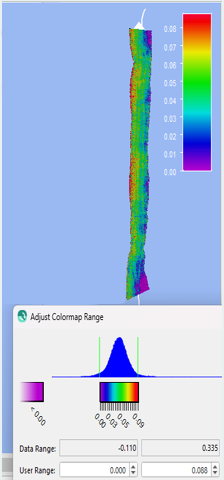
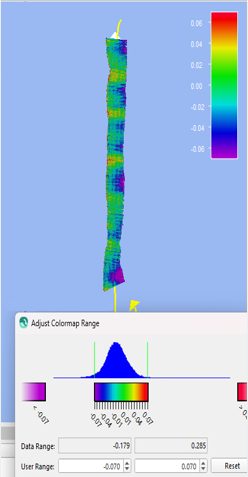
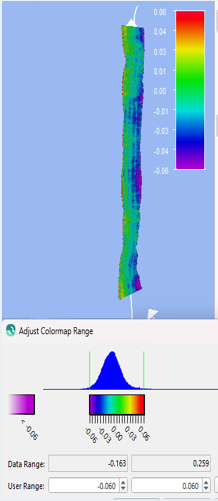
Poniższe zrzuty ekranu przedstawiają porównanie obok siebie starej i nowej wersji algorytmu. Należy pamiętać, że chociaż skale kolorów są różne, podane statystyki wyraźnie wskazują na poprawę. Warto wspomnieć, że pomimo wizualnych artefaktów w starym algorytmie kompensacji kołysania, które były spowodowane nietypowymi stanami morza i konfiguracją dużego statku, wartości pozostały w granicach specyfikacji.
Porównanie starej i nowej wersji algorytmu
Oceny te potwierdzają znaczną poprawę wydajności naszych nowych algorytmów kompensacji kołysania, zapewniając doskonałą dokładność i niezawodność w różnych warunkach.
Poprawa pomiarów kompensacji kołysania w czasie rzeczywistym i z opóźnieniem
Ulepszenia wydajności podsumowano w poniższej tabeli, pokazując wyraźną poprawę zarówno w pomiarach kompensacji kołysania w czasie rzeczywistym, jak i z opóźnieniem.
| Stara kompensacja kołysania w czasie rzeczywistym | Nowa kompensacja kołysania w czasie rzeczywistym | Stare opóźnione falowanie | Nowe opóźnione falowanie | Odniesienie PPK | |
|---|---|---|---|---|---|
| Średnia | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| Odchylenie standardowe | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
Te udoskonalenia gwarantują, że dzięki naszej linii produktów o wysokiej wydajności:
- Aplikacje falowania w czasie rzeczywistym osiągają dokładność 4 cm.
- Aplikacje pomiarowe, kompatybilne z opóźnionym falowaniem i obsługiwane przez główne pakiety oprogramowania hydrograficznego, osiągają dokładność 2 cm.
Dodatkowo, funkcja wysokości z kompensacją kołysania, dostępna w jednostkach morskich, skorzysta z tych ulepszeń. Wszystkie te udoskonalenia są dostępne w naszym oprogramowaniu do post-processingu Qinertia 4 oraz w naszych produktach o wysokiej wydajności, począwszy od wersji firmware 5.1. Wkrótce te ulepszenia zostaną rozszerzone na naszą linię produktów Ellipse.
