PPK (Post-Processing Kinematic) es un método de procesamiento de datos GNSS que consigue un posicionamiento de alta precisión corrigiendo los errores de los datos de posicionamiento sin procesar. El postprocesamiento se utiliza ampliamente en aplicaciones que requieren información geoespacial precisa, como la topografía, la cartografía y las operaciones de vehículos aéreos no tripulados.
SBG Systems ha desarrollado una solución de postprocesamiento GNSS propia para mejorar las prestaciones de sus sistemas de navegación inercial.
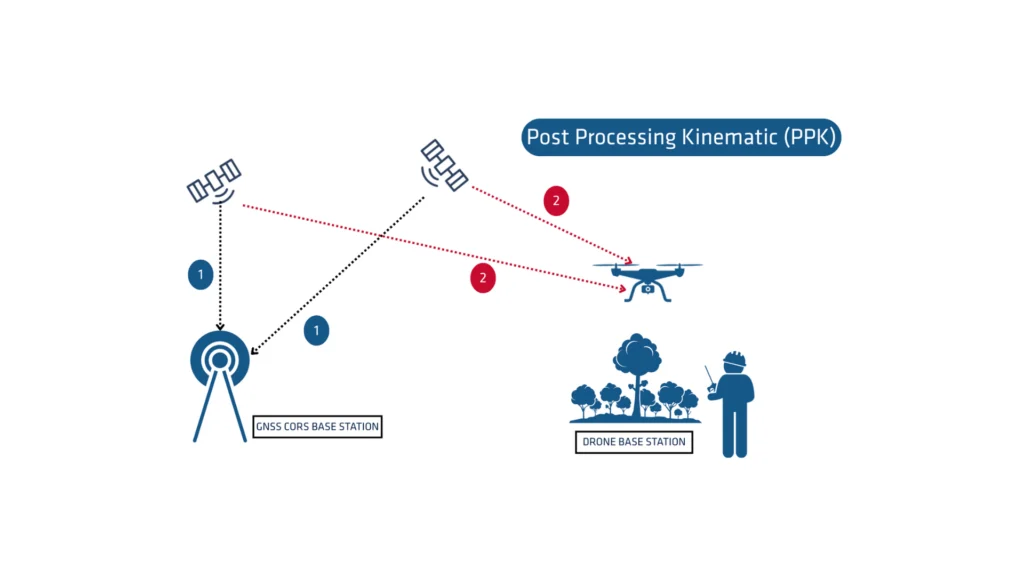
¿Qué es el postprocesamiento GNSS?
El postprocesamiento PPK es un enfoque en el que el sistema procesa las mediciones de datos GNSS sin procesar registradas en un receptor GNSS tras la adquisición de datos. Puede combinarlas con otras fuentes de mediciones GNSS para proporcionar la trayectoria cinemática más completa y precisa para el receptor GNSS, incluso en los entornos más desafiantes.
Estas otras fuentes pueden ser estaciones base GNSS locales en o cerca del proyecto de adquisición de datos, o estaciones de referencia de funcionamiento continuo (CORS) existentes ofrecidas normalmente por agencias gubernamentales y/o proveedores de redes CORS comerciales.
Un software de post-procesamiento cinemático (PPK) puede hacer uso de información de órbita y reloj de satélites GNSS disponible gratuitamente, para ayudar a mejorar aún más la precisión. El PPK permite determinar con precisión la ubicación de una estación base GNSS local en un datum de marco de referencia de coordenadas global absoluto, que es el que utiliza.
El software PPK también puede soportar transformaciones complejas entre diferentes marcos de referencia de coordenadas en apoyo de proyectos de ingeniería.
En otras palabras, da acceso a correcciones, mejora la precisión del proyecto e incluso puede reparar pérdidas de datos o errores durante el levantamiento o la instalación después de la misión.
RTK frente a PPK
La cinemática en tiempo real (RTK) es una técnica de posicionamiento que transmite correcciones GNSS casi en tiempo real, normalmente mediante un flujo de corrección en formato RTCM. Sin embargo, puede haber problemas a la hora de garantizar las correcciones GNSS, concretamente su integridad, disponibilidad, cobertura y compatibilidad.
PPK ofrece la gran ventaja de optimizar las actividades de procesamiento de datos durante el postprocesamiento, incluido el procesamiento hacia delante y hacia atrás. Por el contrario, el procesamiento en tiempo real puede sufrir interrupciones o incompatibilidades en las correcciones y su transmisión, lo que conduce a un posicionamiento de menor precisión.
Una primera ventaja clave del postprocesamiento GNSS PPK frente al tiempo real (RTK) es que el sistema utilizado sobre el terreno no necesita disponer de un enlace de datos/radio para alimentar las correcciones RTCM procedentes de los CORS en el sistema INS.
La principal limitación para la adopción del postprocesamiento es el requisito de que la aplicación final actúe sobre el entorno. Por otro lado, si su aplicación puede soportar el tiempo de procesamiento adicional necesario para producir una trayectoria optimizada, mejorará en gran medida la calidad de los datos para todos sus entregables.
¿Cómo mejora la precisión de los datos el procesamiento hacia delante y hacia atrás?
Imaginemos que tenemos una interrupción del GNSS de 60 segundos en medio de nuestro estudio. El error de posición en el procesamiento hacia delante crece rápidamente (la tasa depende de las especificaciones de IMU y de otros parámetros) y alcanza su máximo al final de la interrupción. A continuación, se recupera rápidamente.
En el postprocesado, fingimos que el tiempo fluye hacia atrás y realizamos el procesado en orden anticronológico, ya que las ecuaciones físicas siguen siendo válidas. En este procesamiento hacia atrás, el error sería máximo al comienzo real de la interrupción del GNSS de forma muy simétrica al procesamiento natural hacia delante.
La fusión de estos dos cálculos da como resultado un error máximo en torno a la mitad de la interrupción, con una magnitud mucho menor que las soluciones sólo hacia delante o sólo hacia atrás. Esto mejorará especialmente las soluciones INS que permiten los productos SBG Systems Systems, pero el procesamiento sólo GNSS también se beneficiará de este flujo de trabajo.
Como ya se ha dicho, el postprocesamiento es la única forma de lograr esta mejora porque se necesitan todos los datos de principio a fin, lo que retrasa su uso hasta el final del levantamiento.
Accesible a todas las aplicaciones topográficas
RTK se utiliza ampliamente para el posicionamiento GNSS de alta precisión en cartografía, control de la construcción y aplicaciones marinas que requieren resultados en tiempo real. El postprocesamiento de datos INS beneficia a las aplicaciones UAV y USV en las que la implementación de radio y el seguimiento del flujo de corrección RTCM suponen un reto.
Los topógrafos aéreos tienden a utilizar PPK, porque los enlaces de datos con los aviones son difíciles de realizar, ya que la red celular funciona mal en altitud debido a la orientación de las antenas de radiodifusión terrestre.
Otras aplicaciones que necesitan postprocesado cinemático son aquellas en las que los datos (datos de imagen o LiDAR, por ejemplo) se procesan en un flujo de trabajo posterior, a menudo en la cloud, y en las que se puede añadir fácilmente el procesamiento de la trayectoria con un software de postprocesado GNSS como Qinertia.