配备 Ekinox-E 的 SeaRoboticsUSV
SeaRoboticsUSV 集成了 Ekinox-E 惯性导航系统,用于多波束补偿和数据地理参照。
"Ekinox-E 使我们能够简化系统集成,同时仍能为客户提供获取和处理高分辨率测深数据的能力"。|SeaRobotics 公司开发经理 Geoff D.

USV 2.5,来自 SeaRobotics 的最小USV
USV 2.5 是一种长 2.5 米的无人水面航行器USV),可提供多种仪器,并可根据任务要求灵活更换传感有效载荷。USV 2.5 已交付北卡罗来纳州立大学海洋科学与技术中心。
水深测量设备齐全
USV 集成:
- 一个 Edgetech 6205 SwathBathymetric 和同步双频侧扫声纳系统、
- 声速探头、
- SBG Systems 公司高度灵活的惯性导航系统 Ekinox-E 与 Hemisphere 公司的双天线 RTK GPS 相连接、
- 和 HYPACK 软件。
"USV 将用于海床和水柱测绘,这对更好地了解各种海洋和水生过程(包括生态系统动态、水质和海岸线稳定性)至关重要",该项目的首席研究员Del Bohnenstiehl说。
SBG公司的Ekinox-E惯性导航系统是USV 2.5的不二之选,"SeaRobotics公司开发经理Geof Douglass说,
"与具有类似分辨率的竞争产品相比,Ekinox因其小巧的外形而更易于集成。在小型无人水面航行器(USV)上,可用有效载荷(重量、占地面积、功率、输入/输出)是最宝贵的资产。Geof 补充说:"Ekinox-E 使我们能够简化系统集成,同时还能为客户提供获取和处理高分辨率测深数据的能力。


咨询 Ekinox-E 的报价
您有问题吗?
欢迎访问我们的常见问题版块!在这里,您可以找到有关我们展示的应用程序的最常见问题的答案。如果您没有找到所需的信息,请直接与我们联系!
什么是测波传感器?
波浪测量传感器是了解海洋动态、提高海上作业安全和效率的重要工具。通过提供准确及时的波浪状况数据,它们有助于为从航运和导航到环境保护等各个领域的决策提供信息。
波浪浮标是装有传感器的浮动装置,用于测量波浪参数,如高度、周期和方向。
它们通常使用加速度计或陀螺仪来探测波浪运动,并能将实时数据传输到岸基设施进行分析。
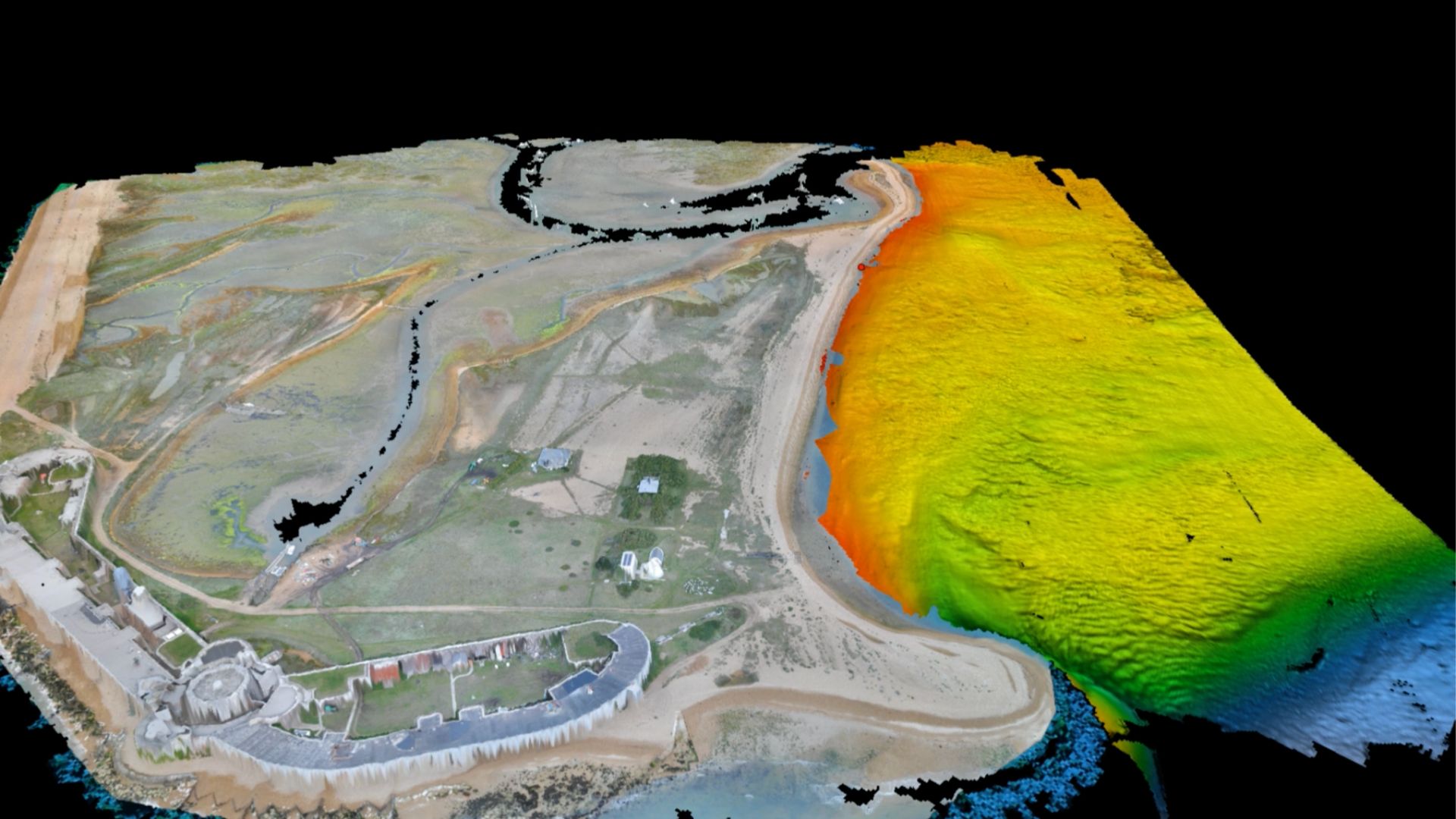
什么是测深?
水深测量是对水下地形的深度和形状进行研究和测量,主要侧重于绘制海底和其他水下地形图。水深测量相当于水下地形学,可以详细了解海洋、湖泊和河流的水下特征。水深测量在导航、海洋建设、资源勘探和环境研究等各种应用中发挥着至关重要的作用。
现代测深技术依靠声纳系统,例如单波束和多波束回声测深仪,利用声波测量水深。这些设备向海底发送声脉冲,记录回波返回的时间,根据声速计算水深。特别是多波束回声探测仪,可以一次性绘制大范围的海底地图,提供高度详细和准确的海底图像。
水深数据对于制作海图至关重要,海图通过识别潜在的水下危险(如沉没的岩石、沉船和沙岸)来帮助引导船只安全航行。它还在科学研究中发挥着重要作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
浮标有什么用?
浮标是一种漂浮装置,主要用于海上和水上环境,有几个主要用途。浮标通常被放置在特定位置,以标记水体中的安全通道、航道或危险区域。它们为船只和船舶提供指引,帮助它们避开岩石、浅水区或沉船等危险地点。
它们被用作船只的锚泊点。系泊浮标让船只无需抛锚就能系泊,这在抛锚不切实际或对环境造成破坏的地区尤其有用。
仪器浮标配有传感器,可测量温度、波高、风速和大气压力等环境条件。这些浮标为天气预报、气候研究和海洋学研究提供了宝贵的数据。
一些浮标充当从水域或海底收集和传输实时数据的平台,通常用于科学研究、环境监测和军事应用。
在商业捕鱼中,浮标可以标出陷阱或渔网的位置。浮标还有助于水产养殖,标记水下养殖场的位置。
浮标还可以标记指定区域,如禁锚区、禁钓区或游泳区,帮助执行水上法规。
在所有情况下,浮标对于确保安全、促进海洋活动和支持科学研究都至关重要。
什么是浮力?
浮力是流体(如水或空气)对浸没在其中的物体的重量产生的作用力。如果物体的密度小于流体的密度,浮力就会使物体漂浮或上升到水面。浮力产生的原因是物体浸没部分受到的压力不同--较低深度受到的压力较大,从而产生向上的力。
阿基米德原理描述了浮力原理,即物体所受的向上浮力等于物体所流过的液体的重量。如果浮力大于物体的重量,物体就会上浮;如果浮力小于物体的重量,物体就会下沉。从海洋工程(设计船舶和潜水艇)到浮标等漂浮装置的功能,浮力在许多领域都至关重要。
什么是USV 的惯性制导系统?
无人水面航行器USV)的惯性制导系统对于精确导航和控制至关重要,尤其是在没有全球导航卫星系统的情况下。惯性传感器可跟踪运动和方向,从而在恶劣环境中实现有效导航。
惯性导航系统INS)将IMU 数据与其他系统(如全球导航卫星系统或多普勒速度记录仪)整合在一起,以提高精度。它们还采用卡尔曼滤波等导航算法来计算位置和速度。
惯性传感器支持自主操作,为各种应用提供精确的航向精度 和位置数据。它们可确保在不具备全球导航卫星系统(GNSS)的条件下有效运行,并可进行实时调整以增强可操作性。