
SAF2Nav:弹性导航
突破传统惯性系统的局限。SAF2Nav融合先进数据源,即使在最恶劣的干扰和欺骗环境中,也能提供持续可靠的定位服务。

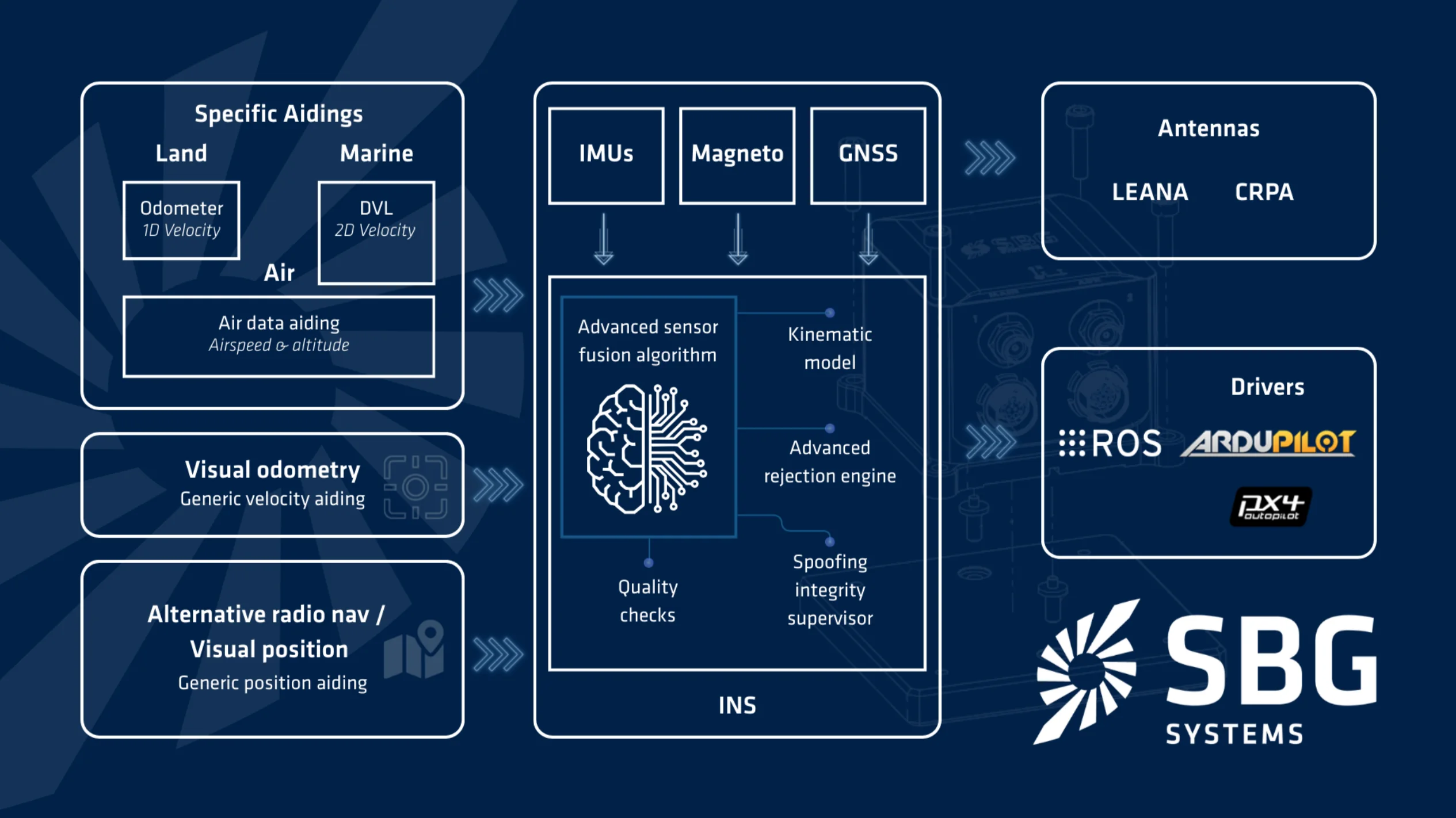
系统架构
SAF2Nav的核心在于其模块化、安全驱动的架构设计,旨在确保持续可靠的导航能力——即使在受干扰且GNSS的环境中亦能保持。让我们通过以下示意图来了解其架构:
多功能传感器辅助
从经过兼容性测试的各类外部传感器中选择,或集成您自己的通用辅助源。
我们提供完整的API接口,可无缝集成至传感器融合算法,内置质量监控功能,并能自动估算外部传感器的偏差、缩放因子及错位。
自适应运动学曲线
通过专为您的运动特性设计的配置文件,实现最高精度。无论在陆地、空中还是海上,融合算法都能即时适应您的载具行为。
双级完整性
内置质量检查功能同时验证原始输入和输出定位,确保导航系统可靠、持续且随时可执行任务。
欺骗完整性监督程序
新型欺骗完整性监控器可实时监测多个传感器及参数,即时发现异常情况。该系统能大幅缩短警报响应时间,对保障任务安全至关重要。
即插即用,体验我们的INS
我们的解决方案旨在减少任务准备工作量(例如 Stellar-40 INS)。由于输入外部信息(例如天气条件)会增加操作限制,因此我们的系统设计为完全自主运行。SAF2Nav 自动估算辅助传感器的关键误差参数,包括内部偏差、比例因子误差、空速数据系统的风速或 DVL 的水速。它还补偿传感器与车辆之间的任何残余未对准,以确保可靠和精确的导航性能。
适用于不断演变的任务需求的灵活导航框架
SAF2Nav确保在任何环境下都能实现可靠导航:无论是恶劣环境、电子战压力下、高要求机器人应用,还是高精度测绘任务。
作为灵活而强大的平台,它覆盖所有关键应用领域,我们持续对其进行升级,以应对新威胁、新技术和任务挑战。
