
SAF2Nav: 복원력 있는 항법
기존 관성의 한계를 뛰어넘으십시오. SAF2Nav는 첨단 데이터 소스를 융합하여 가장 악조건의 전파 방해 및 스푸핑 환경에서도 지속적이고 신뢰할 수 있는 위치 정보를 제공합니다.

내비게이션 복원력을 업그레이드할 준비가 되셨나요?
SAF2Nav가 현대적 위협에 대한 귀사의 위치를 어떻게 강화하는지 알아보세요. 이 기능은 간편한 무료 펌웨어 업데이트로 즉시 이용 가능합니다.
시스템 아키텍처
SAF2Nav의 핵심에는 분할 가능한 보안 중심 아키텍처가 자리 잡고 있으며, 이는 분쟁 지역 및 GNSS 환경에서도 지속적이고 신뢰할 수 있는 항법을 보장하도록 설계되었습니다. 다음 도표를 살펴보겠습니다:
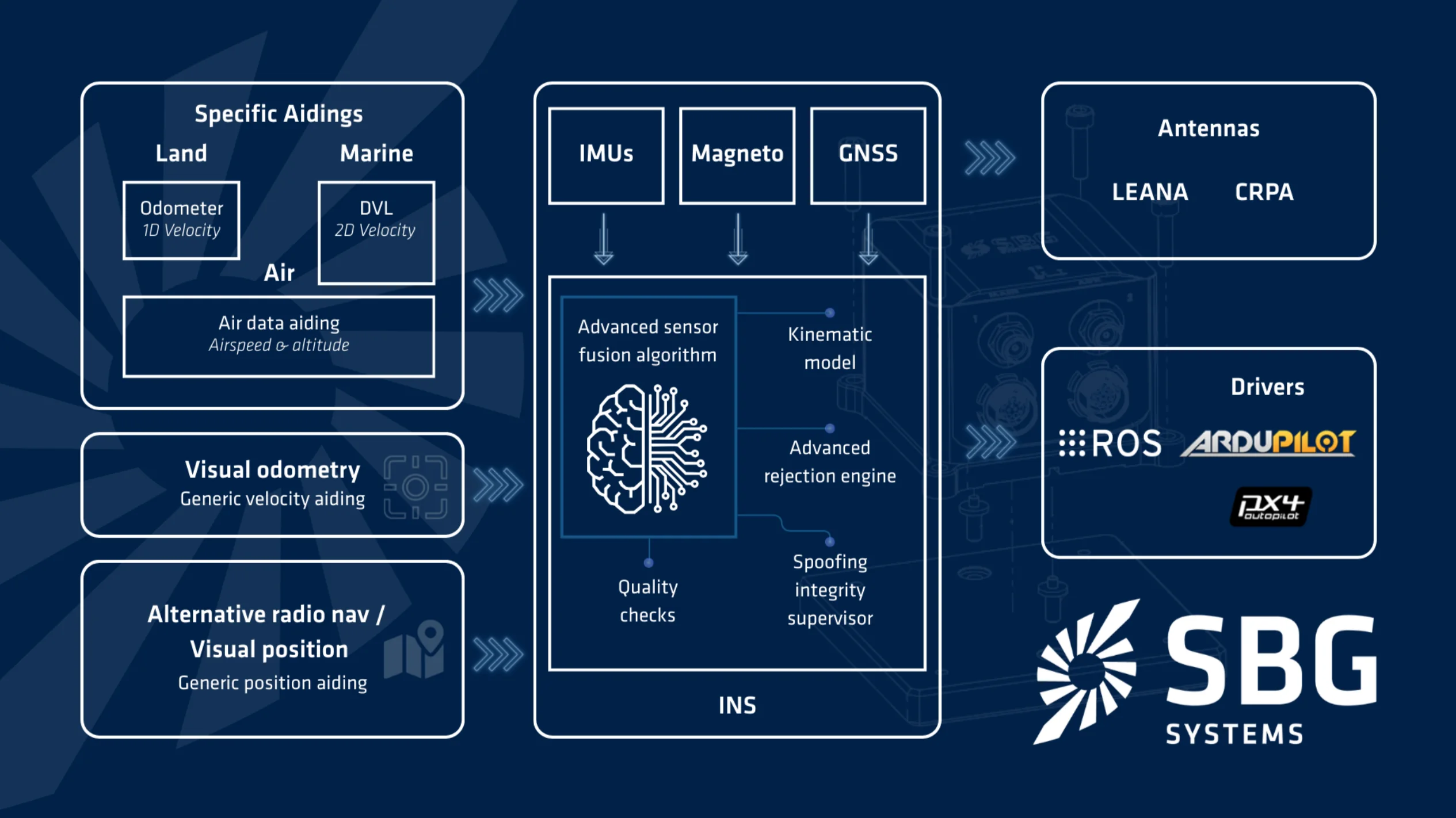
다용도 센서 지원
호환성 테스트를 거친 다양한 외부 센서 중에서 선택하거나 자체적인 일반 보조 소스를 통합하십시오.
당사는 완전한 API, 센서 융합 알고리즘과의 원활한 통합, 내장형 품질 모니터링, 외부 센서의 편차, 스케일 팩터 및 오정렬에 대한 자동 추정 기능을 제공합니다.
적응형 운동학적 프로파일
특정 모션 역학에 맞춰 설계된 프로필로 정확도를 극대화하세요. 육상, 항공, 해상 어디에서든 퓨전 알고리즘이 차량의 움직임에 즉각적으로 적응합니다.
이중 단계 무결성
내장된 품질 검사는 원시 입력 및 출력 위치를 모두 검증하여 신뢰할 수 있고 지속적이며 임무 수행 가능한 항법을 보장합니다.
스푸핑 무결성 감독자
새로운 스푸핑 무결성 감시 장치가 다중 센서와 매개변수를 모니터링하여 이상 현상을 즉시 탐지합니다. 경보 발생 시간을 획기적으로 단축하여 임무 안전에 결정적인 역할을 합니다.
INS와 플러그 앤 플레이
당사의 솔루션은 임무 준비 작업량(예: Stellar-40 INS)을 줄이도록 설계되었습니다. 기상 조건과 같은 외부 정보를 입력하는 것이 운영상의 제약을 추가하므로, 당사의 시스템은 완전 자율적으로 작동하도록 설계되었습니다. SAF2Nav는 내부 바이어스, 스케일 팩터 오류, 공기 데이터 시스템의 풍속 또는 DVL의 수속을 포함하여 지원 센서의 주요 오류 매개변수를 자동으로 추정합니다. 또한 센서와 차량 간의 잔여 정렬 불량을 보정하여 신뢰할 수 있고 정확한 항법 성능을 보장합니다.
끊임없이 진화하는 임무 요구사항을 위한 유연한 항법 프레임워크
SAF2Nav는 가혹한 환경, 전자전 압박 하, 까다로운 로봇 응용 분야 또는 고정밀 측량 임무 등 어디서나 신뢰할 수 있는 항법을 보장합니다.
유연하고 강력한 플랫폼으로서 모든 핵심 응용 분야를 포괄하며, 새로운 위협, 기술 및 임무 과제에 대비하기 위해 지속적으로 진화하고 있습니다.
