
SAF2Nav: 高レジリエンス航法
従来の慣性航法の限界を超えます。SAF2Navは高度なデータソースの融合により、激しいジャミングやスプーフィングといった過酷な環境下においても、継続的な信頼性の高い測位が可能になります。

今のナビゲーションのレジリエンスをより強靭なレベルにしましょう。
SAF2Navが最新の脅威に対してどのようにナビゲーション性能を強化するのかをご確認ください。本機能は、簡単かつ無償のファームウェアアップデートにより、すぐにご利用いただけます。
システムアーキテクチャ
SAF2Navの中核を成すのは、GNSSが利用できない、あるいは信号妨害が存在する環境下においても、信頼性の高いナビゲーション性能を維持するために設計された、モジュール型のセキュリティ志向アーキテクチャです。以下にその構成をご確認ください。
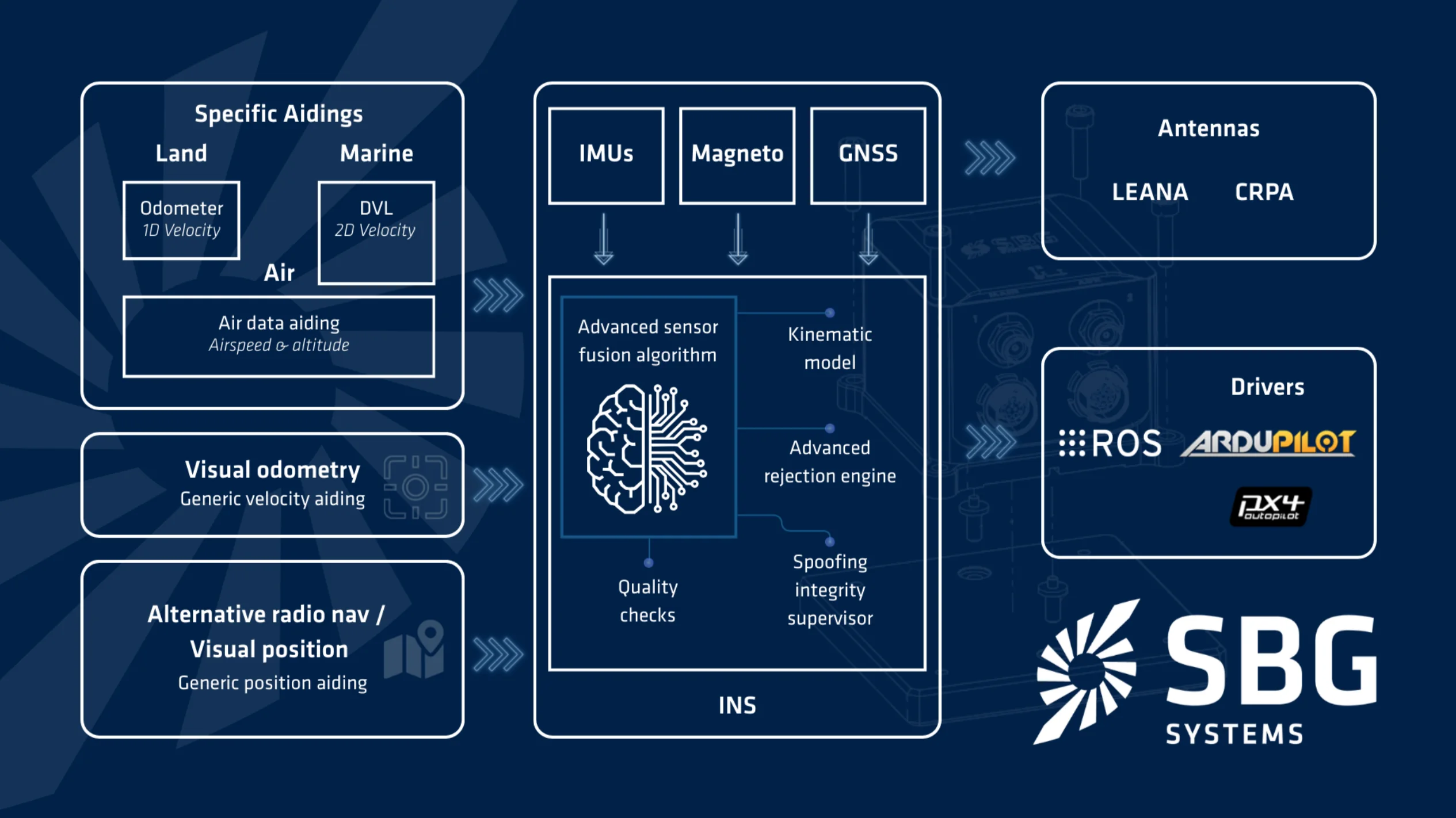
多彩なセンサー支援機能
互換性検証済みの幅広い外部センサーから選択できるほか、独自の汎用支援データソースを統合することも可能です。
当社は、包括的なAPI、センサーフュージョンアルゴリズムへのシームレスな統合機能、内蔵の品質監視機能、さらに外部センサーのバイアス・スケールファクタ・ミスアライメントの自動推定機能を提供します。
適応型キネマティックプロファイル
対象となる運動ダイナミクスに最適化されたプロファイルにより、測位精度を最大化します。陸・空・海を問わず、フュージョンアルゴリズムがビークルの挙動に即座に適応します。
デュアルステージ・インテグリティ
生データ入力と測位出力の双方を検証する品質チェック機能を内蔵しており、信頼性の高い継続的なナビゲーションとミッション遂行を支えます。
スプーフィング・インテグリティ監視機能
複数のセンサーや各種パラメータを監視し、異常を即座に検知する新しいスプーフィング監視機能を搭載しています。警告発生までの時間を大幅に短縮し、ミッションの安全性向上に貢献します。
INSとのプラグアンドプレイ統合
当社のソリューションは、ミッション準備の作業負荷を軽減するように設計されています(例:Stellar-40 INS)。気象条件などの外部情報を入力することは運用上の制約を追加するため、当社のシステムは完全に自律的に動作するように設計されています。SAF2Navは、内部バイアス、スケールファクター誤差、航空データシステム用の風速、またはDVL用の水速など、補助センサーの主要な誤差パラメータを自動的に推定します。また、センサーと車両間の残存するミスアライメントを補償し、信頼性の高い正確な航法性能を保証します。
進化し続けるミッション要件に対応する柔軟なナビゲーションフレームワーク
SAF2Navは、過酷な環境下、電子戦の影響下、高度なロボティクス用途、高精度測量ミッションなど、あらゆる状況において信頼性の高いナビゲーションを実現します。
柔軟かつ高機能なプラットフォームとして、主要なアプリケーション領域を網羅し、新たな脅威や技術の進展、ミッション要件の変化に先行して継続的に進化していきます。
