
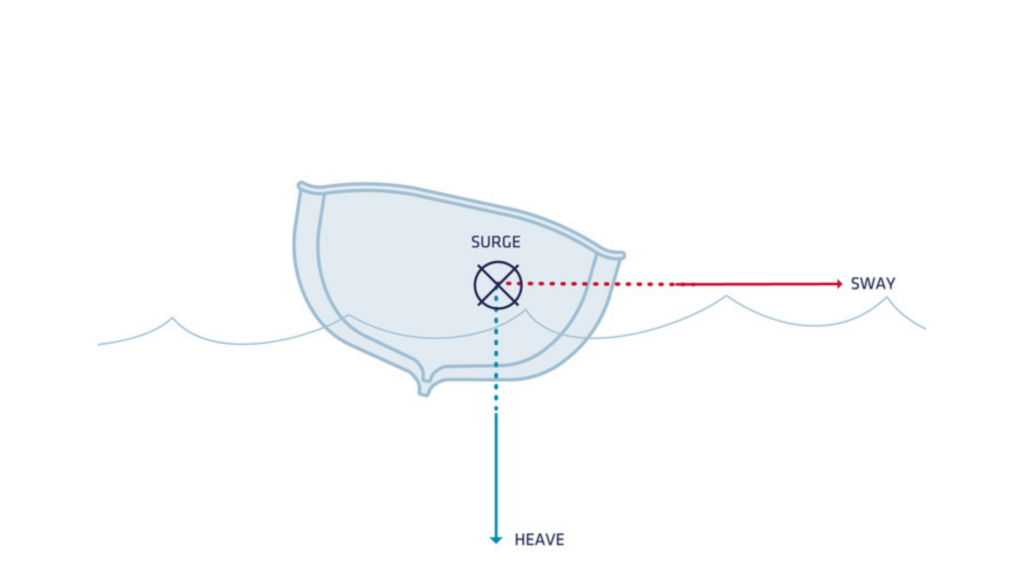
波浪是一种非常特殊的海洋应用运动测量方法。它指的是船只在波浪作用下的上下运动,以沿本地垂直轴的线性位移测量,假定船只重心处的平均值为零。
我们已对实时和延迟海浪算法进行了重大升级。
有关波浪算法以及如何正确设置波浪算法的详细信息,请访问我们的支持中心知识库页面。
最新发展
我们目前的实时和延迟偏摆算法已经处于行业领先地位,并拥有最佳规格。不过,我们已经进行了重大改进,以进一步提高其准确性。固件 5.1 版中引入的最新改进使用了从旋转中心 (COR) 到IMU (惯性测量单元)的距离,从而为实时和延迟波浪算法带来了以下优势:
- 增强性能:
- 实时测波精度从 5 厘米提高到 4 厘米。
- 延迟投掷精度从 2.5 厘米提高到 2 厘米。
- 灵活的IMU 安装:现在,只要提供到 COR 的距离,IMU 可以安装在船上的任何位置。与以前的版本相比,这是一项重大改进,以前的版本要求IMU 安装在船舶 COR 附近,这对大型船舶来说是一项挑战。
- 改善在具有挑战性的海况下的运行状况:即使在更加苛刻的海况下也能保持全部性能。
新算法的鉴定
鉴定波浪性能本身就具有挑战性,尤其是在追求高精度的情况下。我们是这样解决这个问题的:
评估过程
我们进行了多次评估,包括对重复通过同一海底区域获得的测深数据集进行比较。我们的客户和合作伙伴 Norbit 为这些评估提供了便利。
- 测深评估:通过比较同一区域的几条勘测线,我们确定了波浪性能的上限。这种方法考虑了整个采集链的误差,包括INS 位置和角度测量、多波束声纳和其他来源的误差。
- 后处理验证:我们还使用Qinertia后处理 GNSS 数据测试了新的延迟偏摆算法。结果表明,新算法的性能与 RTK 相当。
结果和结论
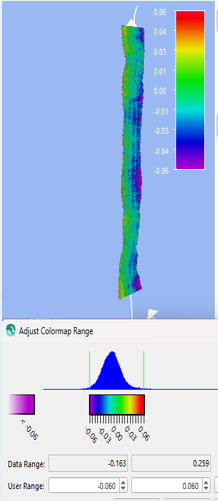
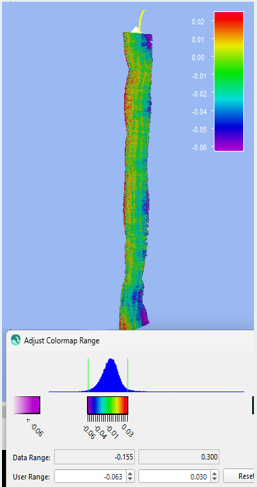
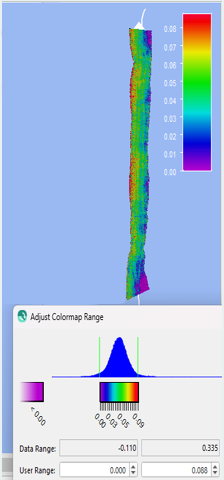
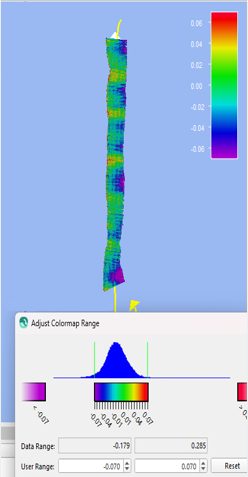
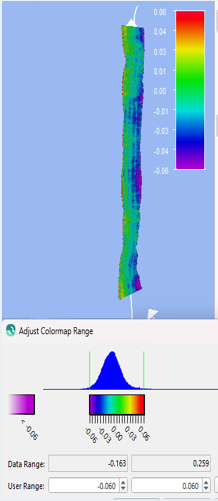
以下截图对新旧算法版本进行了并排比较。请注意,虽然颜色标度不同,但所提供的统计数据清楚地显示了算法的改进。值得一提的是,尽管由于不正常的海况和大型船只的设置,旧版翻腾算法出现了视觉假象,但其数值仍符合规范要求。
新旧算法版本比较
这些评估证实,我们的新海浪算法性能有了显著提高,在各种条件下都能提供卓越的准确性和可靠性。
改进实时和延迟波浪测量
下表总结了性能提升情况,显示了实时和延迟波浪测量的明显改善。
| 老式实时起伏 | 新的实时波浪 | 老式延迟起伏 | 新的延迟起伏 | PPK 参考资料 | |
|---|---|---|---|---|---|
| 平均值 | 4 厘米 | 3 厘米 | 4 厘米 | 1 厘米 | 1 厘米 |
| 标准偏差 | 4 厘米 | 2 厘米 | 2 厘米 | 2 厘米 | 2 厘米 |
这些改进确保了我们的高性能产品系列:
- 实时波浪应用可达到 4 厘米的精度。
- 测量应用与延迟波浪兼容,并由主要的水文测量软件包支持,可达到 2 厘米的精度。
此外,船用设备上的海平面增强功能也将受益于这些改进。从固件 5.1 版开始,我们的 Qinertia 4 后处理软件和高性能产品都可以使用所有这些改进功能。这些改进将很快扩展到我们的Ellipse 产品系列。