PPK(Post-Processing Kinematic)とは、GNSSデータ処理手法の一つで、生の測位データの誤差を補正することで高精度な測位を実現するものです。後処理は、マッピング、地図作成、UAVの運用など、正確な地理空間情報を必要とするアプリケーションで広く使用されています。
SBG Systems 、慣性航法システムの性能を向上させるため、社内でGNSS後処理ソリューションを開発しました。
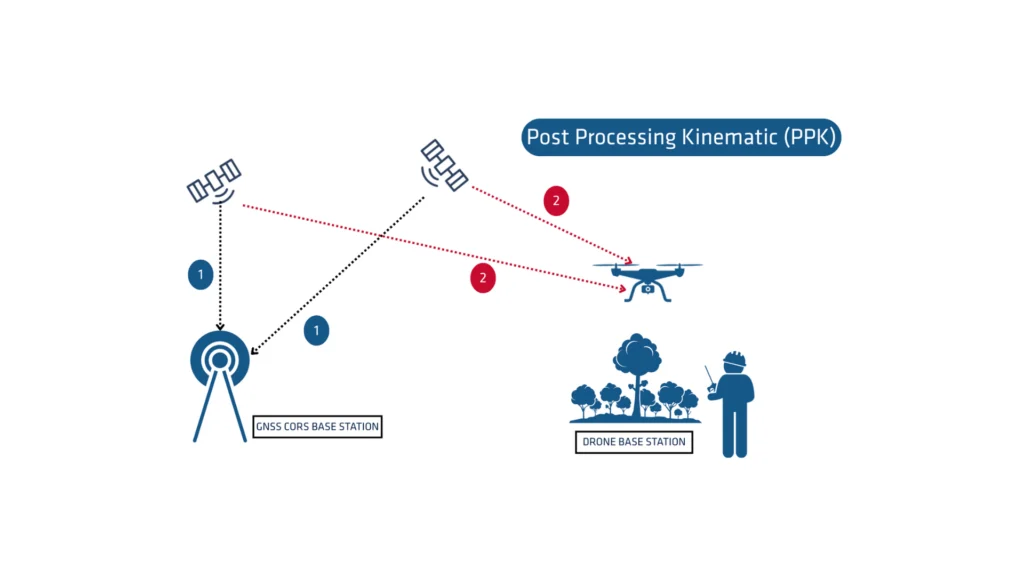
GNSSの後処理とは?
PPKポスト処理は、データ取得後にGNSS受信機に記録された生のGNSSデータ測定値をシステムが処理するアプローチです。
。これらの他のソースは、データ取得プロジェクトまたはその近くにあるローカルGNSS基地局、または政府機関や商用CORSネットワークプロバイダによって一般的に提供されている既存の継続運用基準局(CORS)とすることができます。
ポスト処理キネマティック(PPK)ソフトウェアは、自由に利用できるGNSS衛星の軌道とクロック情報を利用することができ、精度をさらに向上させることができます。
PPKソフトウェアはまた、エンジニアリングプロジェクトをサポートするために、異なる座標参照フレーム間の複雑な変換をサポートすることができます。
言い換えれば、補正へのアクセスを提供し、プロジェクトの精度を高め、さらにはミッション後のサーベイ 中や設置中のデータ損失やエラーを修復することができます。
RTK vs PPK
リアルタイムキネマティック(RTK)は、GNSS補正をほぼリアルタイムで送信する測位技術で、通常RTCM形式の補正ストリームを使用します。しかし、GNSS補正、特にその完全性、可用性、カバレッジ、互換性を確保する上で課題がある場合があります。
PPKは、フォワード処理とバックワード処理を含む後処理中のデータ処理アクティビティを最適化できるという大きな利点があります。これとは対照的に、リアルタイム処理は、補正とその送信における中断や非互換性に悩まされる可能性があり、精度の低い測位につながります。
GNSS PPKポスト処理とリアルタイム(RTK)の最初の重要な利点は、現場で使用されるシステムがCORSから来るRTCM補正をINSシステムにフィードするためのデータリンク/無線を持つ必要がないことです。
ポスト処理採用の主な制限は、環境に作用する最終的なアプリケーションの要件です。一方、アプリケーションが最適化された軌道を生成するために必要な追加処理時間に耐えることができれば、すべての成果物のデータ品質が大幅に向上します。
フォワード・プロセッシングとバックワード・プロセッシングは、どのようにデータの精度を向上させるのか?
サーベイ途中で60秒間のGNSS停止があったとしよう。前方処理での位置誤差は急速に増大し(その速度はIMU 仕様やその他のパラメータに依存する)、停電の終了時に最大になる。
後処理では、物理方程式が有効なままであるため、時間が逆向きに流れ、反時系列的に処理を行うことにする。この後方処理では、自然な前方処理と非常に対称的な方法で、誤差はGNSS停止の実際の開始時に最大になります。
これら2つの計算をマージすることで、停電の中央付近で最大誤差が生じますが、その大きさはフォワードのみ、またはバックワードのみのソリューションよりもはるかに小さくなります。これは特にSBG Systems 製品で許可されているGNSSINS INSソリューションを改善しますが、GNSSのみの処理もこのワークフローから恩恵を受けるでしょう。
前述の通り、後処理はこの改善を達成する唯一の方法です。これは最初から最後まですべてのデータが必要なため、サーベイ終了までその使用が遅れるからです。
すべてのマッピング アプリケーションにアクセス可能
RTKは、地図作成、建設管理、およびリアルタイムの結果を必要とする海洋アプリケーションにおける高精度GNSS測位に広く使用されています。INS データの後処理は、無線の実装やRTCM補正ストリームの監視が困難なUAVやUSV アプリケーションにメリットがあります。
航空測量士はPPKを使用する傾向があります。地上放送アンテナの向きのため、高度では携帯電話ネットワークがうまく機能しないため、飛行機へのデータリンクは困難だからです。
ポスト処理キネマティックが必要な他のアプリケーションは、データ(例えば画像やLiDARデータ)が後続のワークフローで処理されるもので、多くの場合cloud処理され、QinertiaのようなGNSSポスト処理ソフトウェアによる軌跡の処理が簡単に追加できるものです。