Nos systèmes de navigation inertielle ont été testés lors d'un levé hydrographique de trois jours dans la zone portuaire de Hambourg (Allemagne). SBG Systems et MacArtney Germany GmbH ont équipé un navire de levé avec une configuration complète de levé par échosondeur multifaisceaux et ont effectué divers tests pour montrer les performances des systèmes inertiels SBG dans différents environnements difficiles. Découvrez notre test bathymétrique marin.
Conditions de test
Initialement, les données brutes de l'INS ont été enregistrées en temps réel et fusionnées avec les données MBES du RESON SeaBat 7125 dans le logiciel d'acquisition Teledyne PDS. Par la suite, les données hydrographiques ont été post-traitées et filtrées avec BeamWorx AutoClean.
De plus, les données INS ont été traitées à l'aide du logiciel PPK Qinertia de SBG. Enfin, la référence est la solution Horizon haut de gamme à fibre optique couplée de manière rigoureuse.
Nous remercions MacArtney Allemagne pour son aide lors de ce test bathymétrique marin.
Procédure d'étalonnage du test bathymétrique marin
Étalonnage basé sur les données de mouvement et de trajectoire du SBG Horizon pendant le test bathymétrique marin.
L'interface comprend la ligne de levé, la bathymétrie calculée, les couches indiquant la qualité et les éléments topographiques.
Rapports et résultats d'étalonnage
Les systèmes de navigation inertielle SBG Systems ont été testés lors d'un levé hydrographique de trois jours à Hambourg, en Allemagne. De plus, SBG Systems et MacArtney Germany GmbH ont équipé un navire de levé avec une configuration complète de sondeur multifaisceaux pour évaluer les performances de l'INS dans des conditions difficiles.
Les capteurs testés comprenaient Horizon, Apogee, Ekinox (Navsight Marine Series) et Ellipse. L'équipe a enregistré les données INS brutes en temps réel et les a fusionnées avec les données MBES du Reson SeaBat 725 à l'aide de Teledyne PDS.
Par la suite, ils ont post-traité et filtré les données hydrographiques avec Beam Worx AutoClean, tandis que Qinertia a géré le traitement des données INS. De plus, un logiciel SIG a généré des modèles 3D et des cartes Web interactives, affichant les calculs bathymétriques basés sur l'INS et les couches de qualité. JavaScript a été utilisé pour formater les mises en page. L'évaluation a porté sur les résultats de l'étalonnage, les données bathymétriques, les trajectoires et les indicateurs de qualité, en se concentrant sur les performances de mouvement et de positionnement.
Chaque test bathymétrique marin comprenait des levés sous les ponts et des levés de chenaux avec des coupures GNSS et des opérations dans de fortes houles. De plus, l'étude a analysé les améliorations du levé à partir du post-traitement faiblement et étroitement couplé des journaux INS bruts.
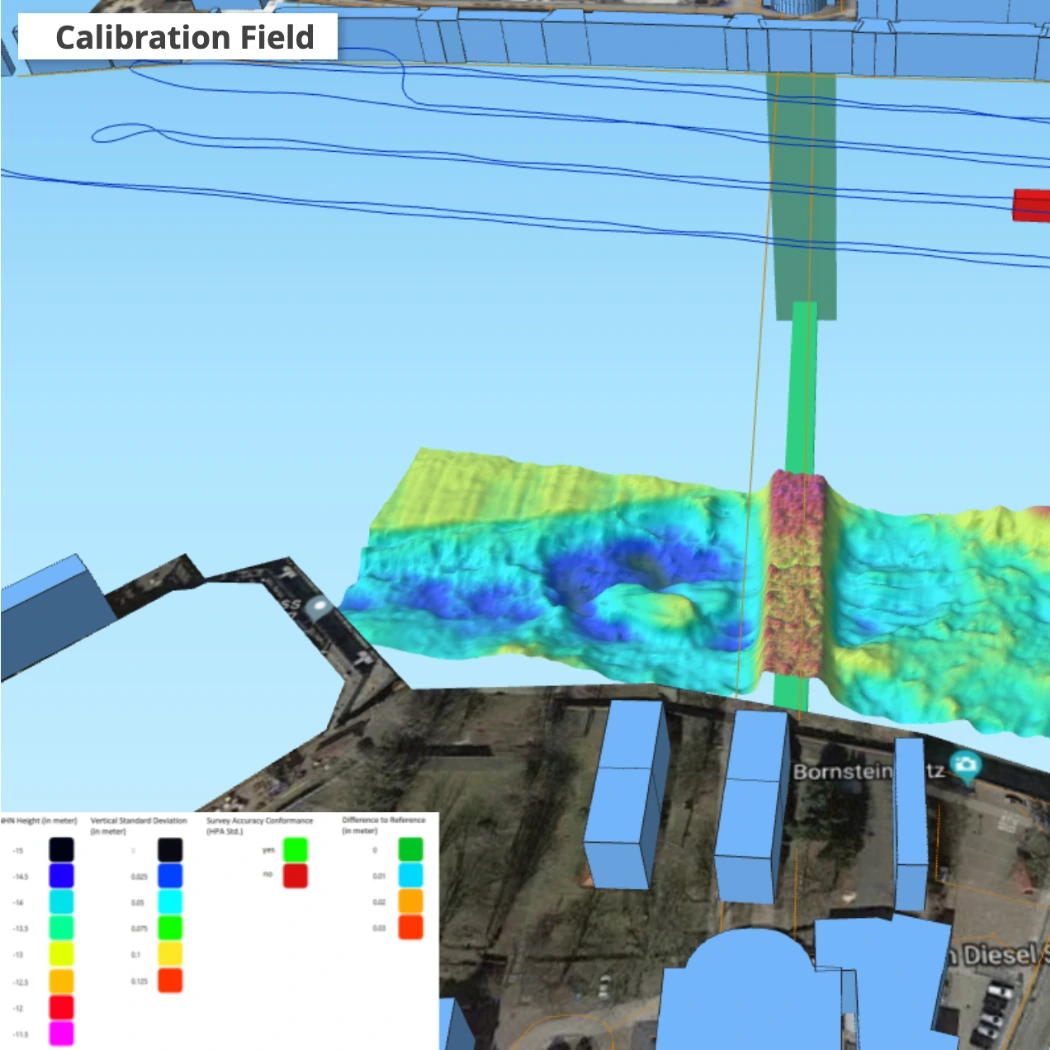
1 – Champ d'étalonnage du capteur de mouvement
Garantir une haute précision dans la détection de mouvement commence par un étalonnage rigoureux. Nos capteurs inertiels sont soumis à des tests approfondis pour corriger les biais, les facteurs d’échelle et les défauts d’alignement. Grâce à des plates-formes multi-axes avancées et à des environnements contrôlés, ce processus améliore la précision et la stabilité des capteurs dans un large éventail de conditions de fonctionnement. En ajustant avec précision la réponse de chaque capteur, l’étalonnage garantit des performances fiables dans les applications exigeantes telles que l’aérospatiale, la marine et la navigation autonome.
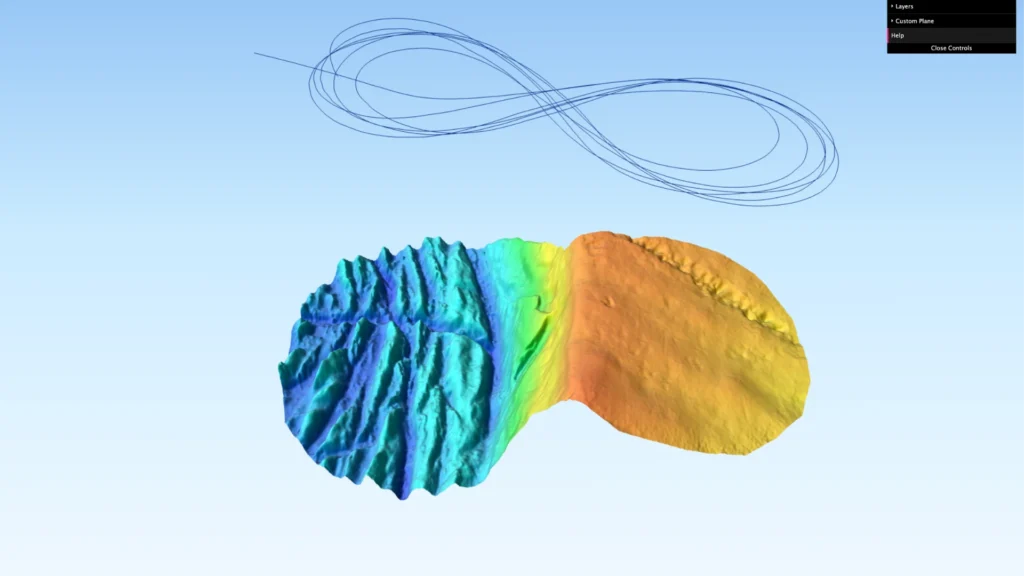
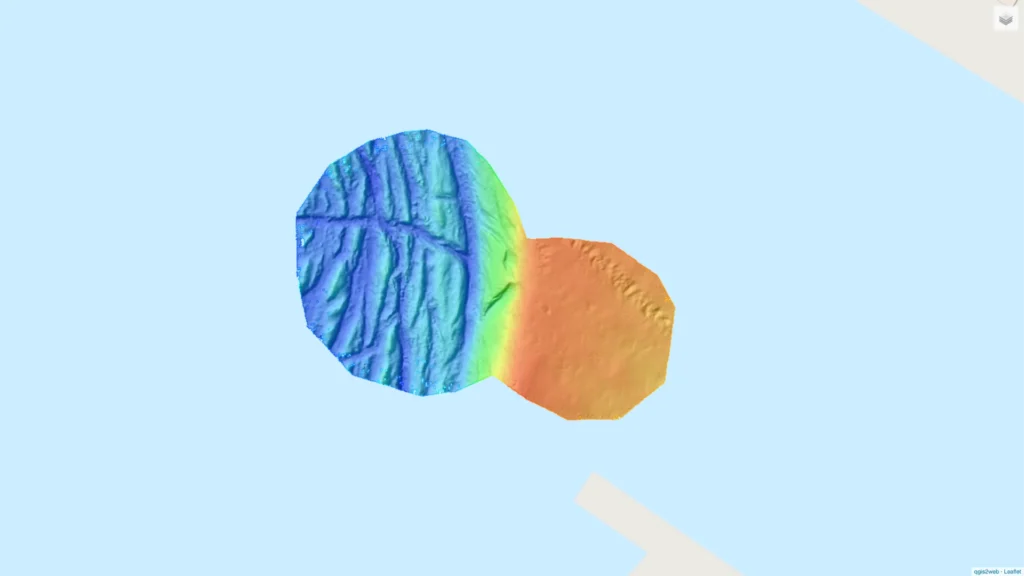
Modèle 3D
Visualisation 3D de la zone d'étude pour la calibration du capteur de mouvement, basée sur les données de mouvement et de trajectoire du SBG Horizon. L'interface inclut la ligne d'étude, la bathymétrie calculée, les couches indiquant la qualité et les éléments topographiques.
Carte de levé 3D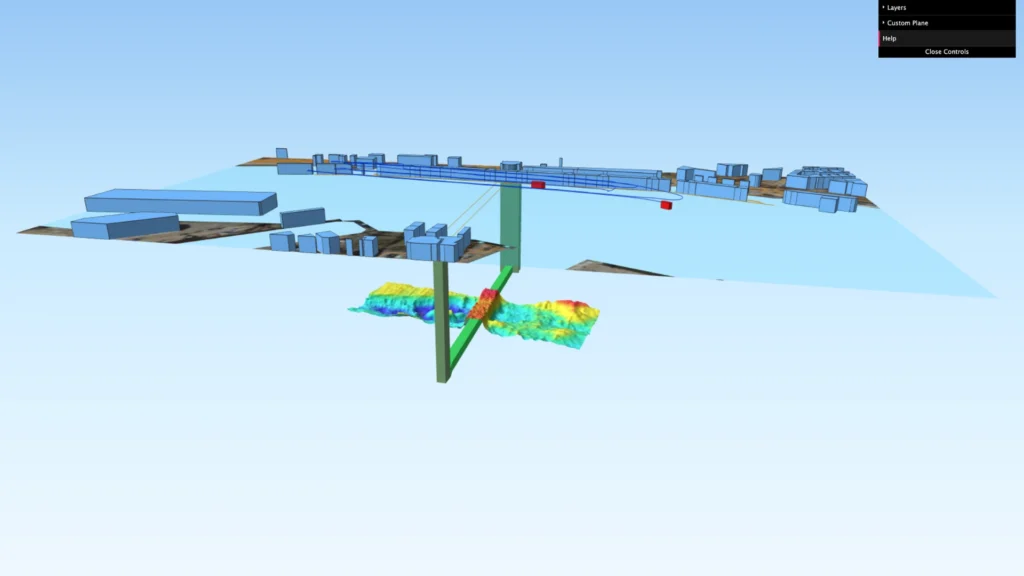
Rapports/décalages d'étalonnage
Rapports d'étalonnage et angles de montage conseillés pour chaque système inertiel SBG. Le logiciel de Patching BeamworX Autopatch génère tous ces rapports. Lors d'un levé d'alignement, l'équipe a mesuré les décalages pour chaque capteur en fonction de la configuration du navire et de la configuration des capteurs, puis les a évalués à l'aide de Cremer Caplan.
Test de positionnement ponctuel précis
Test du nouveau mode de traitement PPP dans Qinertia. Les surfaces bathymétriques et les couches de qualité ont été calculées sur la base de solutions INS RTK (temps réel) et PPP (post-traitement).
2 – Tests inertiels
Les capteurs inertiels sont soumis à des tests rigoureux dans des environnements contrôlés afin de garantir une précision et une fiabilité élevées. Ces tests évaluent les principaux paramètres de performance tels que la stabilité du biais, la précision du facteur d'échelle, les niveaux de bruit et la réponse dynamique. En simulant des conditions réelles, y compris les variations de température et les profils de vibration, les ingénieurs valident la résilience et la précision du capteur. En fin de compte, grâce à des tests inertiels approfondis, les fabricants garantissent des performances optimales pour les applications critiques dans les domaines de la défense, de l'aérospatiale et des systèmes autonomes.
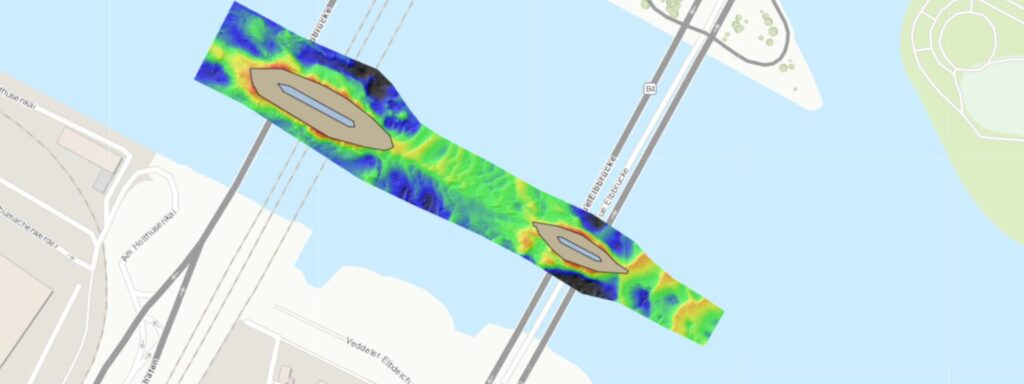
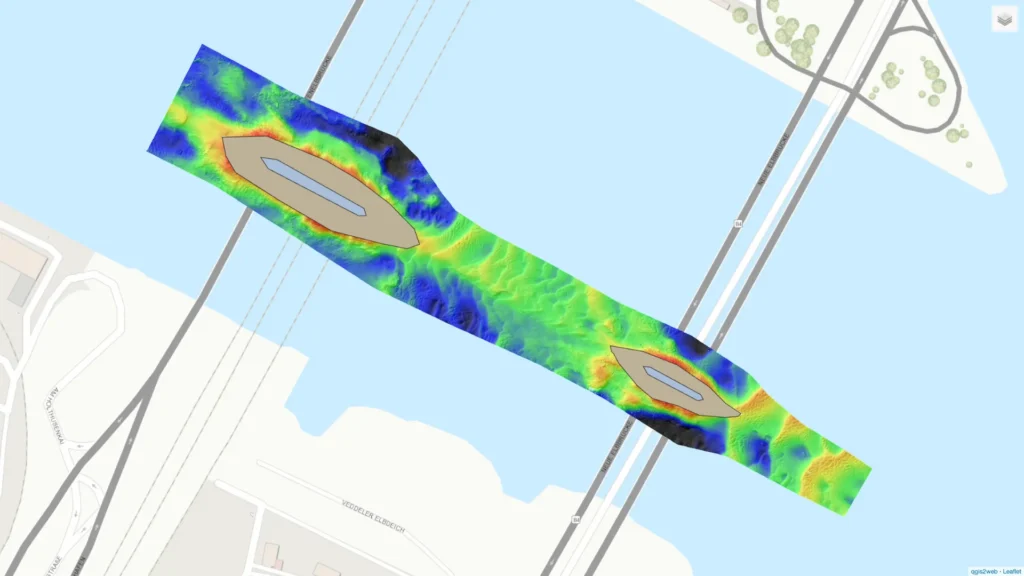
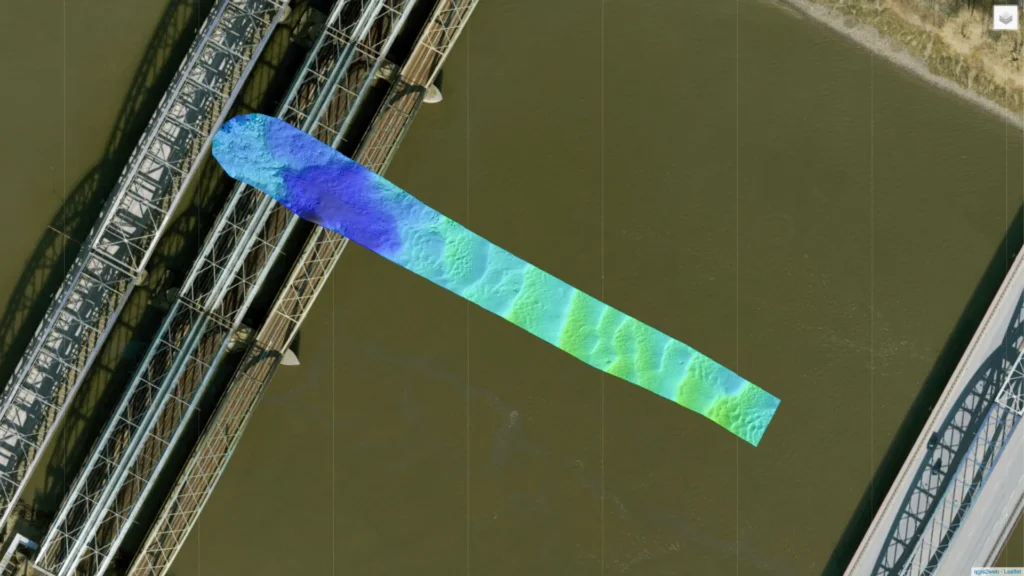
Webmap d'Elbbrücken
Carte web de la surface du fleuve Elbe le long des piliers de l'Elbbrücken et mesures de qualité bathymétrique ainsi que les trajectoires. La référence pour les surfaces de différence est une solution Horizon étroitement couplée. Le capteur de comparaison est un système à fibre optique haut de gamme.
Modèle 3D d'Elbbrücken
Visualisation 3D de la bathymétrie sous l'Elbbrücken à Hambourg, basée sur les données de trajectoire du SBG Horizon. L'interface comprend la ligne de levé, la bathymétrie calculée, les couches d'indication de qualité et les éléments topographiques.
Modèle 3D d'Elbbrücken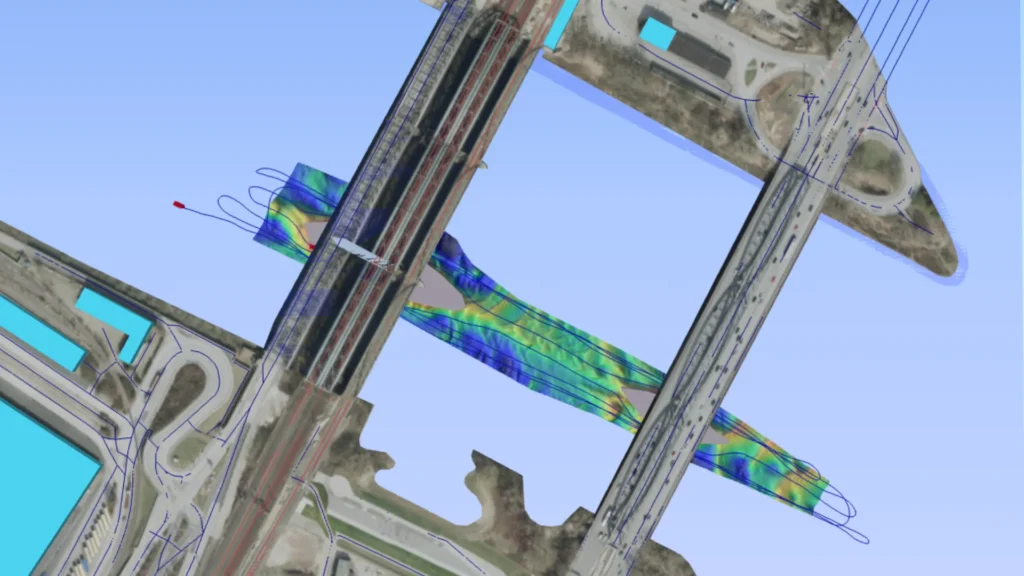
Carte web de Speicherstadt
Carte web de la surface du fleuve Elbe le long des canaux de la Speicherstadt et mesures de qualité bathymétrique, ainsi que les trajectoires. La référence pour les surfaces de différence est une solution Horizon étroitement couplée. Le capteur de comparaison est un système à fibre optique haut de gamme.
Chenaux du modèle bathymétrique 3D de Speicherstadt
Visualisation 3D de la bathymétrie le long des canaux de la Speicherstadt, basée sur les données de trajectoire du SBG Horizon. L'interface comprend la ligne de levé, la bathymétrie calculée, les couches d'indication de qualité et les éléments topographiques.
Modèle 3D de Speicherstadt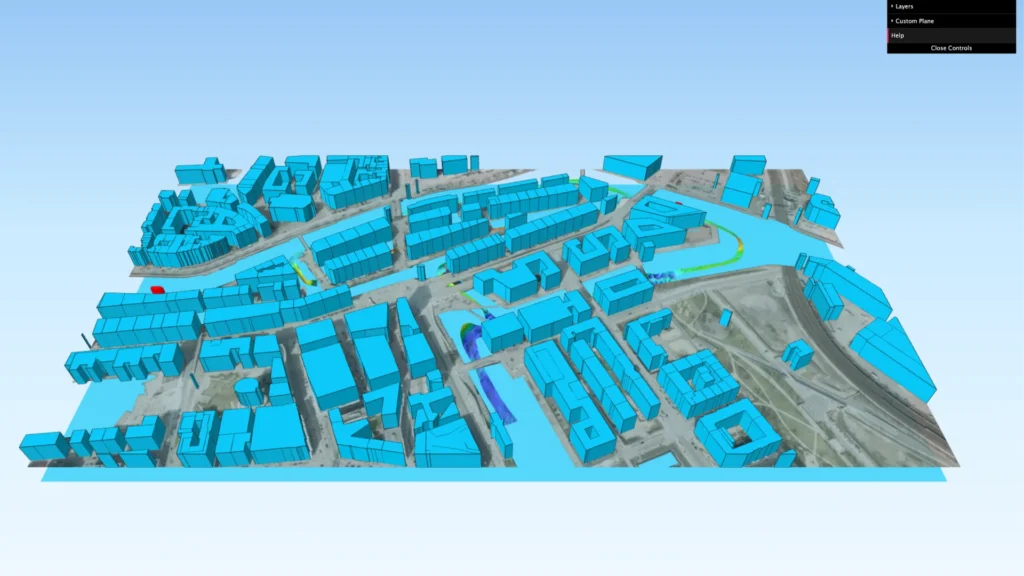
Carte web du virage à 180° sous un pont
Carte web de la surface du fleuve Elbe le long de l'Elbbrücken et mesures de qualité bathymétrique ainsi que les trajectoires. Le levé contient un virage complet à 180° pendant une panne complète du RTK. La référence pour les surfaces de différence et le système de comparaison est une solution de capteur à fibre optique post-traitée.
3 – Tests de mouvement
Ces tests simulent la dynamique du monde réel, en évaluant les performances dans des conditions variables telles que les accélérations rapides, les vibrations et les mouvements de rotation. En analysant les réponses des capteurs, nous affinons les algorithmes d'étalonnage et de compensation afin d'optimiser la précision dans les applications les plus exigeantes.
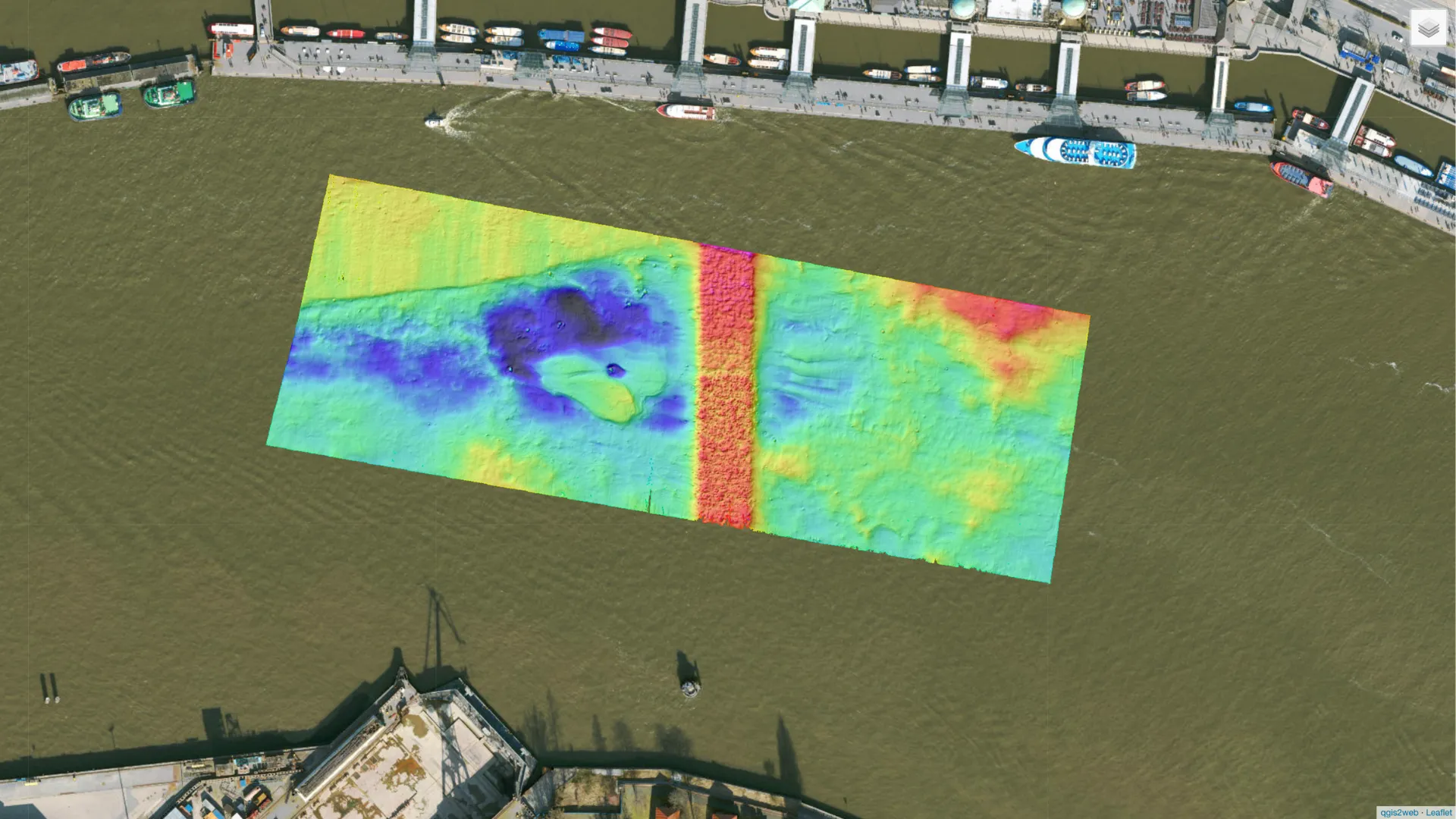
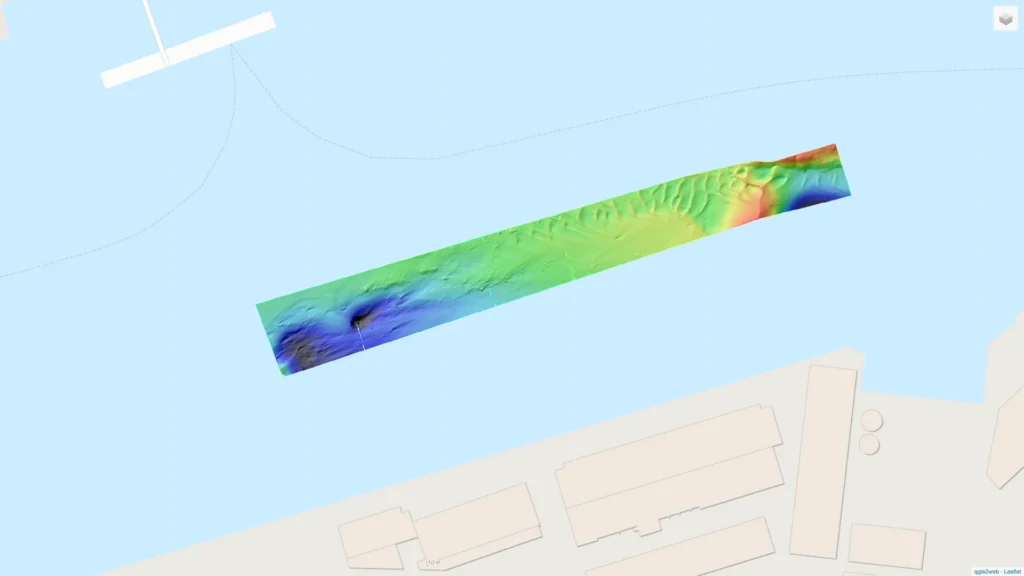
Webmap des docks de Hambourg
Webmap de la surface du fleuve Elbe à côté des docks du port de Hambourg et mesures de qualité bathymétrique ainsi que la trajectoire. Au cours de ce test, des modèles de mouvements dynamiques, dus à la houle induite par les navires passant devant le navire, ont été enregistrés. La référence pour les surfaces de différence est une solution de capteur à fibre optique en temps réel.
Modèle 3D des docks de Hambourg
Visualisation 3D de la bathymétrie de l'Elbe à côté des docks du port de Hambourg, basée sur les données de trajectoire du SBG Horizon. L'interface comprend la ligne de levé, la bathymétrie calculée, les couches d'indication de qualité et les éléments topographiques.
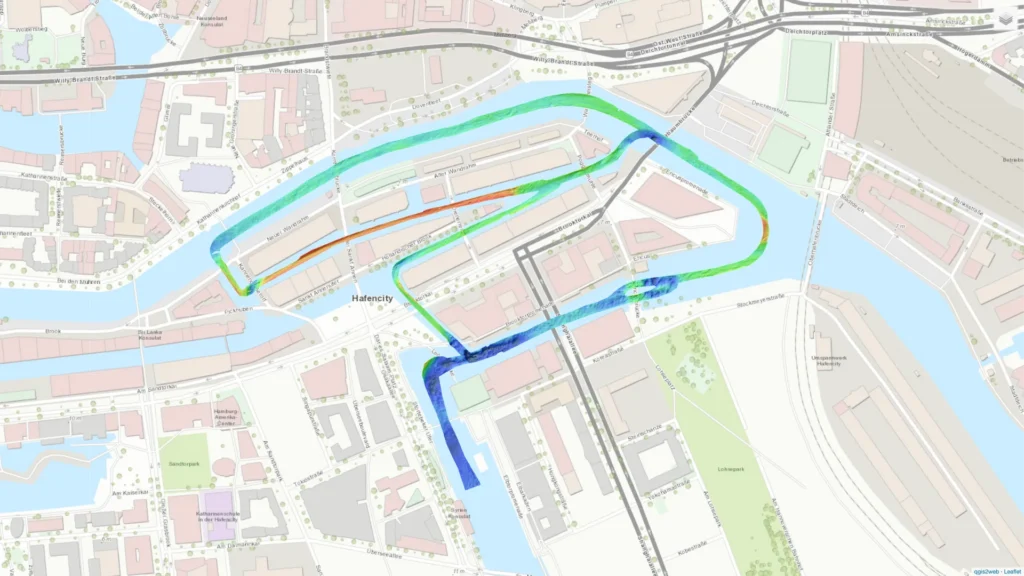
Webmap du port de Hambourg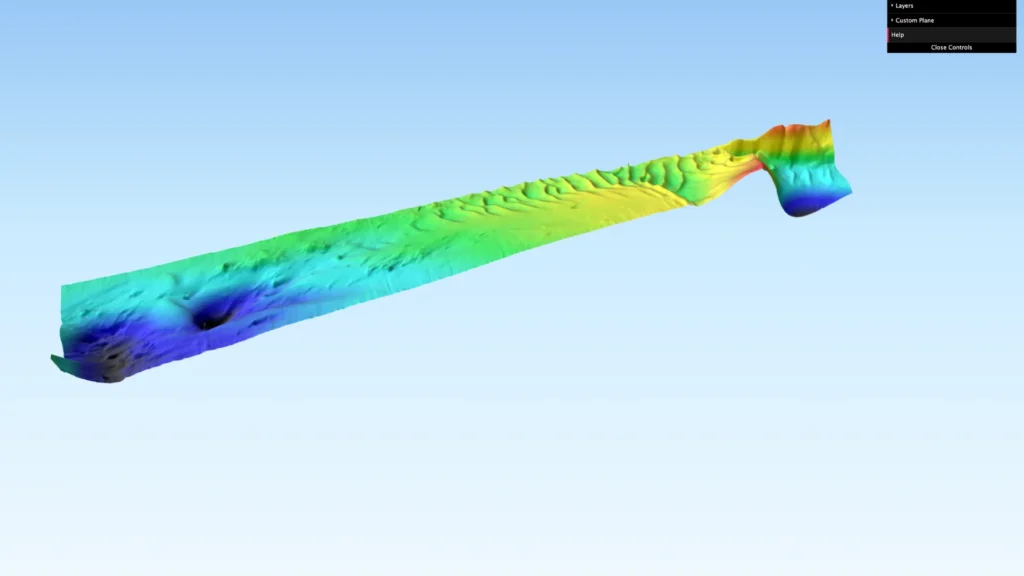
8 Figure en-tête webmap
Carte web de la surface du fleuve Elbe lors d'une manœuvre en 8 et des mesures de qualité bathymétrique ainsi que de la trajectoire. Cette manœuvre conditionne particulièrement les performances de cap des capteurs lors d'un test bathymétrique marin. La référence pour les surfaces de différence est une solution de capteur à fibre optique en temps réel.
8 Figure en-tête Modèle 3D
Visualisation 3D de la bathymétrie de l'Elbe lors d'une manœuvre en 8, basée sur les données de trajectoire du SBG Horizon. L'interface comprend la ligne de levé, la bathymétrie calculée, les couches d'indication de qualité et les éléments topographiques.
Webmap de modèle de levé 3D