Ellipse compatible avec Cobham satcom
La compatibilité entre l'Ellipse-D et l'Aviator UAV 200 est attestée par le CNES pour le pointage d'antenne. « L'INS Ellipse-D de SBG présente une conception remarquablement compacte qui permettra aux industriels des UAV d'améliorer et de développer les services qu'ils proposent ; c'est le savoir-faire français à la pointe de l'innovation. » – L'équipe du centre Cesars du CNES

Le CNES, également appelé Centre National d'Études Spatiales, est une agence française dédiée aux études spatiales. Il opère sous la tutelle des ministères de l'Économie, de la Défense et de la Recherche.
Le centre CESARS du CNES facilite l'accès aux communications par satellite
L'une des missions est de développer, de présenter et d'exécuter le programme spatial français pour le gouvernement national. Le CNES se concentre sur 5 domaines stratégiques : Ariane (lanceurs), Sciences, Observation, Télécommunications et Défense.
Le CNES a créé le centre Cesars afin de diffuser et d'accroître l'utilisation des Satcom dans tout nouveau type d'application.
Cesars accueille gratuitement des entreprises, des laboratoires, des collectivités, pour leur donner des conseils, des retours d'expérience sur les technologies, les aider en effectuant des tests et en leur donnant accès à la plateforme technique elle-même, y compris le matériel.
Une solution combinée pour un contrôle amélioré en temps réel pour la navigation des UAV
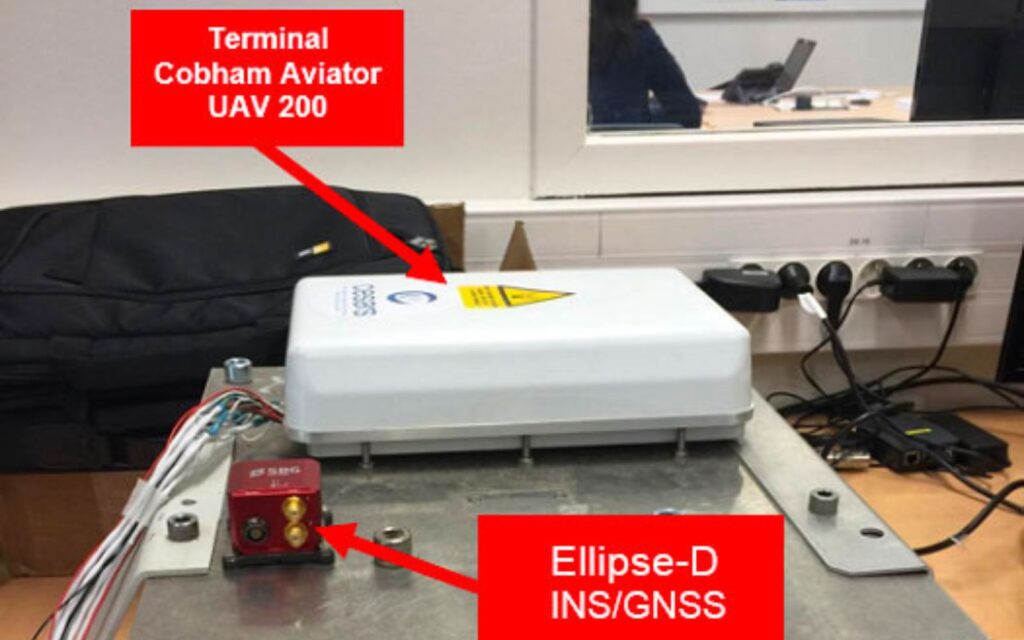
L'équipe CESARS teste et vérifie généralement les équipements au sol avant de lancer un projet. Ici, l'objectif était de confirmer la compatibilité entre l'AVIATOR UAV 200 de Cobham et le système de navigation inertielle Ellipse-D de SBG Systems.
Ellipse-D est un système de navigation inertielle miniature à double antenne qui fournit des données de navigation et d'orientation très précises, même dans les environnements les plus exigeants.
Comme tous les capteurs SBG, l'Ellipse-D INS/GNSS subit des tests approfondis de -40°C à 85°C pour garantir des performances optimales. De plus, il est soigneusement calibré pour assurer une fiabilité dans toutes les conditions.
L'AVIATOR UAV 200 est un terminal Satcom compact tout-en-un (antenne et modem) qui s'intègre dans un petit UAV. Il permet la connexion entre un UAV et un satellite, ce dernier agissant comme un intermédiaire entre l'UAV et le contrôle au sol.
La solution de Cobham transmet des informations, telles que des vidéos, de l'UAV au contrôle au sol à un débit de données très faible (200 kbps). L'AVIATOR UAV 200 permet à l'UAV de voler plus longtemps et plus loin de la salle de contrôle via une communication BLOS (Beyond Line of Sight).
Comment fonctionnent-ils ensemble ?
Le capteur inertiel transmet les données de roulis, tangage, lacet, cap et position à l'AVIATOR UAV 200. Nous utilisons ces données pour orienter le faisceau de l'antenne de l'AVIATOR UAV 200 vers un satellite de télécommunication et le suivre avec précision.
Par la suite, cela contribue à maintenir une transmission de données optimale. Plus le pointage de l'antenne est précis, plus la liaison satellite sera stable.
L'Ellipse-D INS/GNSS fournit un cap précis et fiable dès le démarrage, grâce à son récepteur GNSS à double antenne, ce qui est essentiel pour ces applications. Le capteur INS fournit des données de mouvement et de position pour aider l'AVIATOR UAV 200 à maintenir la liaison satellite en vol.
En cas de spoofing, l'INS contribuera à maintenir un cap robuste grâce à l'Extended Kalman Filter.
Tests statiques et en mouvement en configuration terrestre
En octobre 2020, le CNES a mené quelques tests au sein du CST (Centre Spatial de Toulouse).
Tout d'abord, l'équipe a préparé le matériel et le logiciel en laboratoire. De plus, ils ont intégré le matériel dans le camion Oscar. Oscar, un laboratoire mobile, transporte et teste les antennes OTM directement sur les routes. Après avoir confirmé le bon fonctionnement en stationnaire, l'équipe a effectué des tests OTM au sein du CNES.
Enfin, ces tests ont confirmé la compatibilité entre le capteur inertiel et le terminal.
Configuration de l'équipement
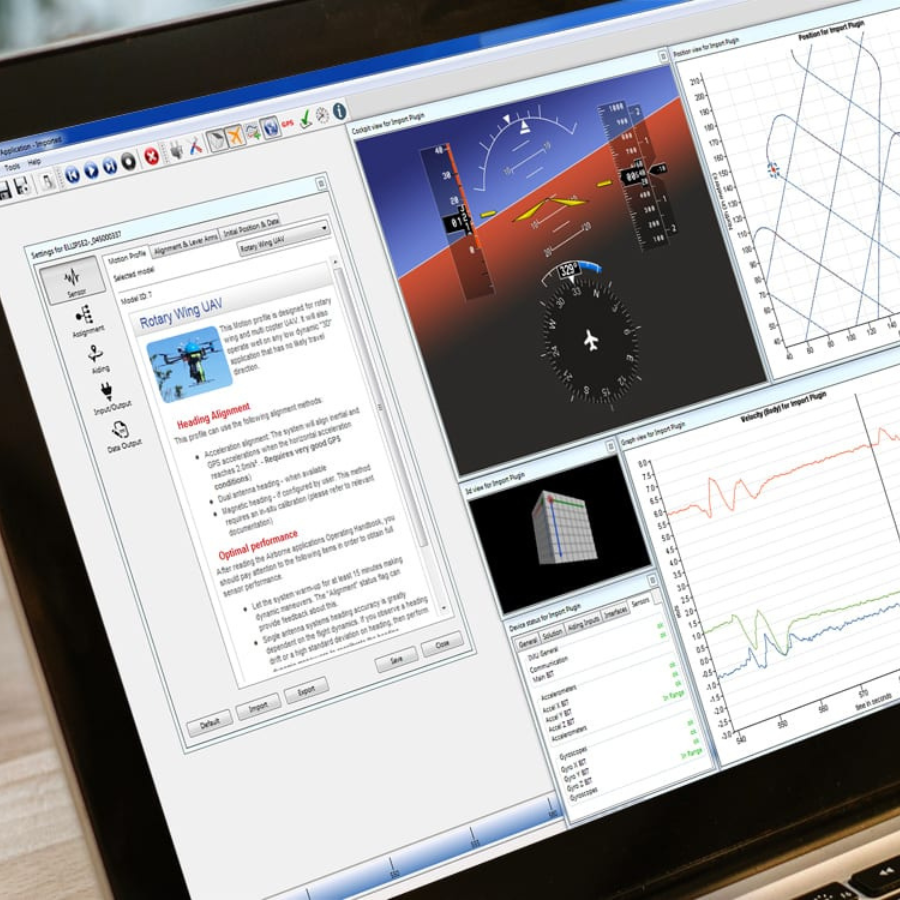
Lors du test en mode stationnaire en laboratoire, le CNES a utilisé le logiciel sbgcenter fourni avec l'Ellipse-D INS/GNSS pour configurer l'équipement afin de l'adapter au mieux à leur application.
Ce logiciel propose différents profils de mouvement pour ajuster les paramètres du filtre de Kalman étendu (EKF) et offrir les meilleures performances en fonction des conditions d'utilisation.
Paramètres choisis sur le logiciel sbgCenter :
- Choix du profil : « usage général ». C'était le plus adapté au comportement du camion Oscar. Pour une intégration sur un UAV, un profil UAV doit être choisi.
- Configuration des 2 antennes GNSS : elles doivent être à plus de 45 cm du terminal Cobham, et dans un “environnement” similaire (suffisamment proches, sans obstacles entre elles, et soumises aux mêmes dynamiques).
- Alignement du véhicule par rapport à l'unité de contrôle entrée (dans notre cas, ils sont orientés le long du même axe).
- Si d'autres capteurs sont placés sur le porteur, ils peuvent également être saisis (tube de pitot, accéléromètre…).
- Le port COM A de l'Ellipse-D INS/GNSS (le “principal”) est connecté au PC pour visualiser les informations reçues sur le sbgcenter. Le port E est connecté au terminal Cobham. Les deux sont configurés à 115200 bauds.
- En ce qui concerne la sortie des données, la fréquence de transmission des messages AT_ITINS doit être de 50 Hz maximum.

Intégration et test OTM
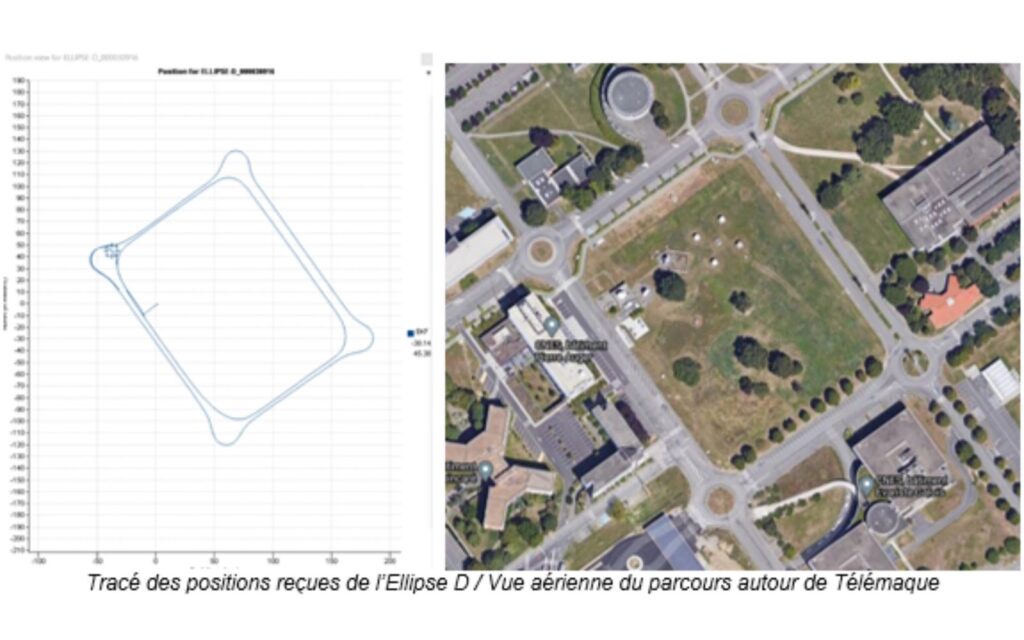
Deux tests « On-The-Move » ont été effectués sur le même circuit. Le circuit de test comprend des lignes droites et des ronds-points, et la vitesse maximale pour le compléter était de 30 km/h.
Le premier test a révélé que des ajustements de paramètres étaient nécessaires, en particulier la fréquence de transmission qui était réglée trop haut. Lors du deuxième test, la connexion était stable, même en cas de changement de direction, validant ainsi les paramètres.
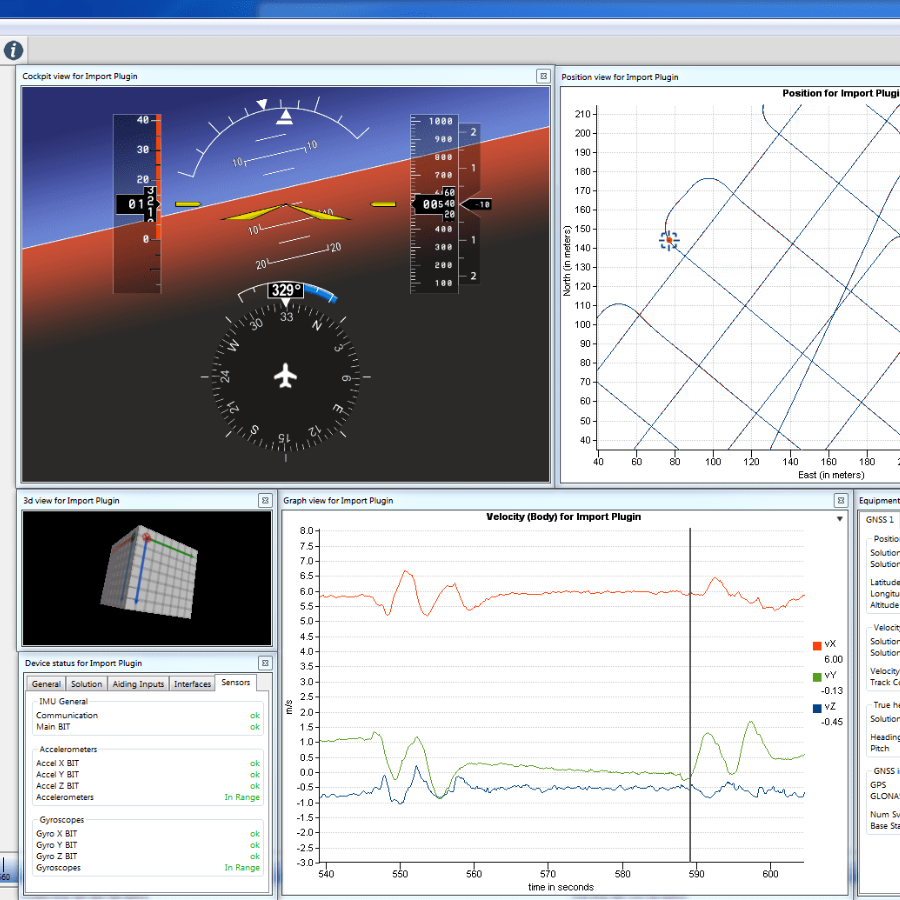
Le ping a réussi correctement, et les latences les plus longues observées sont celles qui suivent un passage près d'un bâtiment (masquage possible de la LOS). Sur l'interface Aviator UAV 200, tout a fonctionné (niveau de signal > 50 dbHz, GPS fix). En enregistrant les sessions de test, les séquences peuvent être relues sur le SBGcenter via différentes options :
- Vue de la position : elle montre une figure avec des animations où vous pouvez suivre la trajectoire du véhicule.
- Vue cockpit : Interface utilisateur graphique avec visualisation des données d'attitude du porteur.

Conclusion
À l'issue de tous ces tests, l'équipe du centre Cesars du CNES a conclu que le Système de Navigation Inertielle Ellipse-D de SBG Systems est compatible avec le terminal Cobham Aviator UAV 200, dans une configuration « au sol ».
Ce test concluant ouvre un large éventail d'opportunités aux utilisateurs de UAV.
Ellipse-D
L'Ellipse-D est un système de navigation inertielle intégrant un GNSS RTK bi-fréquence à double antenne compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée odomètre avec Pulse ou CAN OBDII pour une précision accrue de la navigation à l'estime.

Demander un devis pour l'Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Les UAV utilisent-ils le GPS ?
Les véhicules aériens sans pilote (UAV), communément appelés drones, utilisent généralement la technologie du système de positionnement mondial (GPS) pour la navigation et le positionnement.
Le GPS est un composant essentiel du système de navigation d'un drone, fournissant des données de localisation en temps réel qui lui permettent de déterminer sa position avec précision et d'exécuter diverses tâches.
Ces dernières années, ce terme a été remplacé par un nouveau terme, le GNSS (Global Navigation Satellite System). Le GNSS désigne la catégorie générale des systèmes de navigation par satellite, qui englobe le GPS et divers autres systèmes. En revanche, le GPS est un type spécifique de GNSS développé par les États-Unis.
Comment contrôler les délais de sortie dans les opérations UAV ?
Le contrôle des délais de sortie dans les opérations UAV est essentiel pour garantir des performances réactives, une navigation précise et une communication efficace, en particulier dans les applications de défense ou critiques.
La latence de sortie est un aspect important dans les applications de contrôle en temps réel, où une latence de sortie plus élevée pourrait dégrader les performances des boucles de contrôle. Notre logiciel embarqué INS a été conçu pour minimiser la latence de sortie : une fois que les données des capteurs sont échantillonnées, le Filtre de Kalman étendu (EKF) effectue des calculs faibles et à temps constant avant que les sorties ne soient générées. Généralement, le délai de sortie observé est inférieur à une milliseconde.
Le temps de latence du traitement doit être ajouté au temps de latence de la transmission des données si vous souhaitez obtenir le délai total. Ce temps de latence de transmission varie d'une interface à l'autre. Par exemple, un message de 50 octets envoyé sur une interface UART à 115200 bps prendra 4 ms pour une transmission complète. Envisagez des débits en bauds plus élevés pour minimiser la latence de sortie.
Qu'est-ce que le géorepérage d'UAV ?
Le géorepérage d'UAV est une barrière virtuelle qui définit des limites géographiques spécifiques dans lesquelles un véhicule aérien sans pilote (UAV) peut fonctionner.
Cette technologie joue un rôle essentiel dans l'amélioration de la sécurité, de la sûreté et de la conformité des opérations de drones, en particulier dans les zones où les activités de vol peuvent présenter des risques pour les personnes, les biens ou l'espace aérien réglementé.
Dans des secteurs tels que les services de livraison, la construction et l'agriculture, le geofencing permet de garantir que les drones fonctionnent dans des zones sûres et légales, évitant ainsi les conflits potentiels et améliorant l'efficacité opérationnelle.
Les forces de l'ordre et les services d'urgence peuvent utiliser le géorepérage pour gérer les opérations d'UAV lors d'événements publics ou d'urgences, en veillant à ce que les drones ne pénètrent pas dans les zones sensibles.
Le geofencing peut être utilisé pour protéger la faune et les ressources naturelles en limitant l'accès des drones à certains habitats ou zones de conservation.
Qu'est-ce qu'une charge utile ?
Une charge utile fait référence à tout équipement, dispositif ou matériel qu'un véhicule (drone, navire …) transporte pour remplir sa fonction prévue au-delà des fonctions de base. La charge utile est distincte des composants nécessaires au fonctionnement du véhicule, tels que ses moteurs, sa batterie et son châssis.
Exemples de charges utiles :
- Caméras : caméras haute résolution, caméras d'imagerie thermique, etc.
- Capteurs : LiDAR, capteurs hyperspectraux, capteurs chimiques, etc.
- Équipement de communication : radios, répéteurs de signaux, etc.
- Instruments scientifiques : capteurs météorologiques, échantillonneurs d’air, etc.
- Autre équipement spécialisé
