Défi Hyperloop
L'équipe de l'UCI a utilisé le INS miniature Ellipse-N pour mesurer la position, la vitesse et l'accélération de son pod.
"Nous avons été plus que satisfaits des résultats que nous a donnés Ellipse-N C 'est la source de données la plus fiable que nousayons obtenue. C'est la source de données la plus fiable que nous ayons obtenue". | Andrew T., capitaine de l'équipe HyperXite

HyperXite, l'équipe de l'université UCI, a participé à la deuxième compétition Hyperloop et s'est classée au premier rang des équipes Hyperloop américaines et au deuxième rang mondial pour la lévitation aérienne. Ils ont utilisé l'INS miniature Ellipse-N pour mesurer la position, la vitesse et l'accélération de leur capsule.
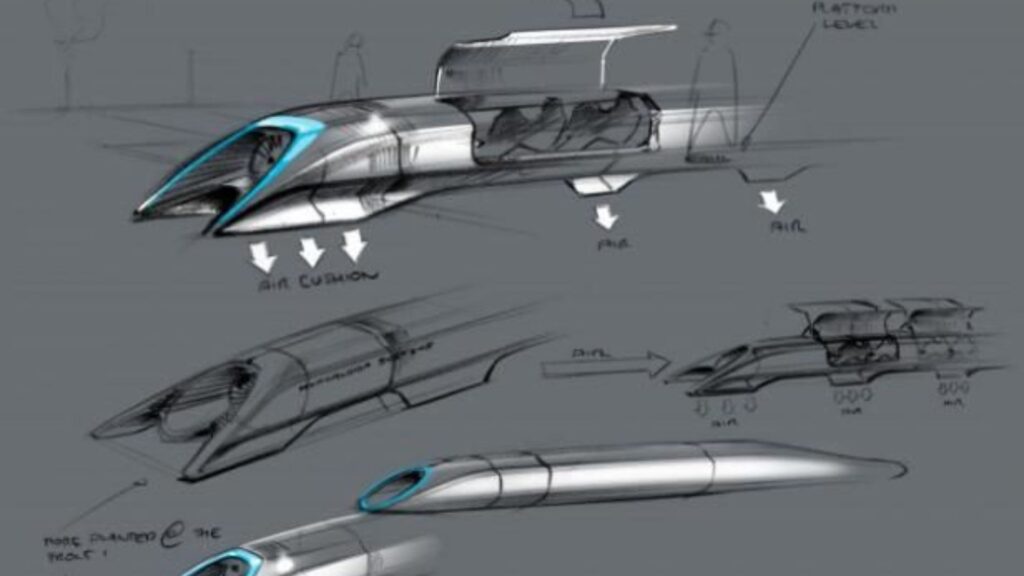
Concept Hyperloop
L'Hyperloop est un concept étonnant qui vise à accroître l'efficacité des transports. L'Hyperloop est constitué d'un tube scellé à travers lequel un pod peut voyager sans résistance à l'air ni friction, transportant des personnes ou des objets à grande vitesse tout en étant très efficace.
En 2015, SpaceX a sponsorisé la première compétition Hyperloop Pod où les équipes ont construit un prototype à échelle réduite pour démontrer la faisabilité technique de divers aspects du concept Hyperloop. HyperXite, l'équipe de l'Université de Californie, Irvine (UCI) a participé à la deuxième compétition Hyperloop avec l'Ellipse-N de SBG Systems.
La compétition II est maintenant terminée et HyperXite est classée première de l'équipe Hyperloop américaine et deuxième au monde pour la lévitation aérienne. L'équipe victorieuse est l'une des six équipes au monde à avoir traversé le tube Hyperloop jusqu'à l'air libre.
L'équipe UCI "Hyperxite", à la compétition Hyperloop
Les étudiants de l'UCI ont travaillé sur un véhicule tubulaire conçu pour se déplacer dans le tube presque sous vide à grande vitesse et avec une grande efficacité. La nacelle est fabriquée en fibre de carbone à la fois solide et légère et intègre des systèmes avancés qui lui permettent de léviter, de transporter des passagers et des marchandises et de s'arrêter en toute sécurité.
La compétition se déroule sur une piste d'essai de 1,6 km de long et de 1,8 m de diamètre, en cours de construction dans le sud de la Californie. Chaque nacelle accélère pour atteindre une vitesse maximale mesurée en temps réel, puis décélère en freinant avant la fin de la piste d'essai. Les nacelles sont évaluées en fonction de leur vitesse, de leur stabilité, de leur freinage et de leur souplesse.
Position, vitesse et accélération du pod
"Notre prototype de pod avait besoin d'un moyen fiable pour mesurer sa position, sa vitesse et son accélération lorsque le pod se trouve dans le tube à vide Hyperloop de SpaceX" explique Andrew Tec, capitaine de l'équipe HyperXite.
Si l'équipe avait initialement envisagé de mettre en œuvre une fusion de capteurs avec plusieurs accéléromètres et codeurs rotatifs pour estimer le comportement de la nacelle, l'Ellipse-N offrait toutes ces fonctionnalités avec une précision de niveau industriel (0,1° de tangage) et dans un petit boîtier.
Le capteur inertiel offrait des fonctionnalités supplémentaires précieuses telles que le positionnement GNSS et le protocole de bus CAN.
"Nous avions besoin d'un composant qui fonctionne bien dans des conditions proches du vide et qui soit facile à intégrer avec des capteurs précis ; l'Ellipse-N répondait à tous ces critères". | Andrew T., capitaine de l'équipe HyperXite
L'intégration rapide et facile de l'Ellipse-N
L'équipe développait à l'aide d'un contrôleur Compact RIO de National Instrument et a trouvé le plugin LabVIEW public SBG très pratique ; il a rendu les tests et le développement extrêmement faciles et rapides.
"Nous avons été plus que satisfaits des résultats que l'Ellipse-N nous a donnés. C'est la source de données la plus fiable que nous ayons obtenue. Le comportement de la machine d'état de notre pod dépendait fortement du profil et du temps estimés de sa trajectoire", conclut le capitaine de l'équipe.
SpaceX a annoncé que la troisième compétition se tiendrait en 2018, et HyperXite concourra avec un tout nouveau pod redessiné pour répondre aux nouvelles règles de la compétition Hyperloop.

Ellipse-N
Ellipse-N est un système de navigation inertielleINS RTK compact et performant, doté d'un récepteur GNSS intégré à double bande et à quadruple constellation. Il fournit le roulis, le tangage, le cap et le pilonnement, ainsi qu'une position GNSS centimétrique.
Le capteurEllipse-N est le mieux adapté aux environnements dynamiques et aux conditions GNSS difficiles, mais il peut également fonctionner dans des applications moins dynamiques avec un cap magnétique.

Demandez une offre pour Ellipse-N
Avez-vous des questions ?
Bienvenue dans notre section FAQ ! Vous y trouverez les réponses aux questions les plus courantes concernant les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Qu'est-ce que le GNSS par rapport au GPS ?
GNSS signifie Global Navigation Satellite System (système mondial de navigation par satellite) et GPS Global Positioning System (système mondial de positionnement). Ces termes sont souvent utilisés de manière interchangeable, mais ils renvoient à des concepts différents au sein des systèmes de navigation par satellite.
Le GNSS est un terme générique qui désigne tous les systèmes de navigation par satellite, tandis que le GPS se réfère spécifiquement au système américain. Il comprend plusieurs systèmes qui offrent une couverture mondiale plus complète, tandis que le GPS n'est qu'un de ces systèmes.
Le GNSS permet d'améliorer la précision et la fiabilité en intégrant les données de plusieurs systèmes, alors que le GPS seul peut avoir des limites en fonction de la disponibilité des satellites et des conditions environnementales.
Quelle est la différence entre l'AHRS et l'INS?
La principale différence entre un système de référence d'attitude et de cap (AHRS) et un système de navigation inertielleINS réside dans leur fonctionnalité et l'étendue des données qu'ils fournissent.
L'AHRS fournit des informations sur l'orientation, c'est-à-dire l'attitudetangage, roulis) et le cap (lacet) d'un véhicule ou d'un appareil. Il utilise généralement une combinaison de capteurs, notamment des gyroscopes, des accéléromètres et des magnétomètres, pour calculer et stabiliser l'orientation. L'AHRS fournit la position angulaire sur trois axestangage, roulis et lacet), ce qui permet à un système de comprendre son orientation dans l'espace. Il est souvent utilisé dans l'aviation, les drones, la robotique et les systèmes marins pour fournir des données précises sur l'attitude et le cap, ce qui est essentiel pour le contrôle et la stabilisation du véhicule.
Un INS ne fournit pas seulement des données d'orientation (comme un AHRS) mais suit également la position, la vitesse et l'accélération d'un véhicule dans le temps. Il utilise des capteurs inertiels pour estimer le mouvement dans l'espace 3D sans dépendre de références externes comme le GNSS. Il combine les capteurs que l'on trouve dans les AHRS (gyroscopes, accéléromètres) mais peut également inclure des algorithmes plus avancés pour le suivi de la position et de la vitesse, intégrant souvent des données externes comme le GNSS pour une plus grande précision.
En résumé, l'AHRS se concentre sur l'orientation (attitude et cap), tandis que l'INS fournit un ensemble complet de données de navigation, y compris la position, la vitesse et l'orientation.
Quelle est la différence entre IMU et INS?
La différence entre une unité de mesure inertielleIMU et un système de navigation inertielleINS réside dans leur fonctionnalité et leur complexité.
Une unité de mesure inertielle ( IMU ) fournit des données brutes sur l'accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas la position ou les données de navigation. L'IMU est spécifiquement conçu pour transmettre des données essentielles sur le mouvement et l'orientation en vue d'un traitement externe permettant de déterminer la position ou la vitesse.
D'autre part, un INS (système de navigation inertielle) combine les données IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il incorpore des algorithmes de navigation tels que le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS fournit des données de navigation en temps réel, y compris la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes comme le GNSS.
Ce système de navigation est généralement utilisé dans des applications qui nécessitent des solutions de navigation complètes, en particulier dans des environnements dépourvus de GNSS, tels que les drones militaires, les navires et les sous-marins.
Le INS accepte-t-il des entrées provenant de capteurs d'aide externes ?
Les systèmes de navigation inertielle de notre société acceptent les entrées des capteurs d'aide externes, tels que les capteurs de données aériennes, les magnétomètres, les odomètres, les DVL et autres.
Cette intégration rend l'INS très polyvalent et fiable, en particulier dans les environnements dépourvus de GNSS.
Ces capteurs externes améliorent les performances globales et la précision de l'INS en fournissant des données complémentaires.