
Dans ce premier article de notre série « Maîtriser la précision », nous explorerons les systèmes mondiaux de navigation par satellite (GNSS) et leurs précisions autonomes en tenant compte des GNSS et de leurs sources d'erreurs.
Qu'est-ce qu'un système GNSS ?
Les systèmes de positionnement par satellite, comme le GPS, sont devenus omniprésents, nous guidant lors de nos trajets en voiture et de nos randonnées. Ils jouent également un rôle essentiel dans diverses applications aussi diverses que les véhicules autonomes, l'agriculture et la topographie.
Cependant, il est important de passer du terme « GPS » au terme plus inclusif « GNSS » (Global Navigation Satellite System), qui englobe toutes les constellations de satellites au-delà du simple GPS.
Il existe quatre constellations de satellites mondiales en fonctionnement (GPS, GLONASS, GALILEO, BEIDOU). De plus, il existe des constellations supplémentaires qui desservent des régions locales, comme l'IRNSS de l'Inde, ou qui complètent les constellations mondiales, comme le QZSS du Japon.
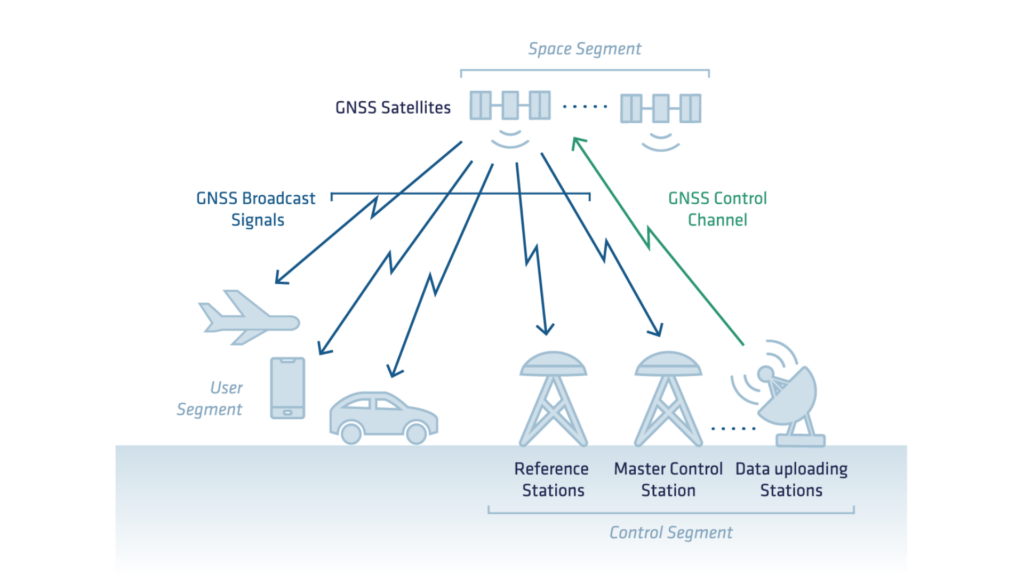
Outre les satellites, un système GNSS comprend d'autres segments essentiels :
- Le segment spatial, qui comprend la constellation de satellites.
- Le segment de contrôle, composé de stations de contrôle au sol et d'équipements. Ceux-ci sont responsables de la surveillance des constellations, de la détermination de la position des satellites et de la garantie de leur fonctionnement continu et correct.
- Le segment utilisateur, qui comprend l'équipement utilisé pour calculer une position basée sur les signaux reçus des satellites.
Principe fondamental du GNSS : la trilatération
Le GNSS détermine la position et l'heure d'un récepteur par trilatération, en utilisant les signaux de plusieurs satellites.
Pour calculer une position, le système doit résoudre quatre variables : la latitude, la longitude, l'altitude et l'heure. Ce processus nécessite au moins quatre satellites, bien que des satellites supplémentaires améliorent la précision et la fiabilité.
L'image suivante illustre le fonctionnement de la trilatération. Chaque satellite définit une sphère autour de lui, représentant les distances possibles par rapport au récepteur.
Un deuxième satellite réduit les solutions possibles à l'intersection de ces deux sphères. Un troisième satellite affine encore la solution, permettant au système de localiser un emplacement unique. Dans les applications réelles, le système doit également tenir compte du temps, ce qui nécessite un quatrième satellite.
Signal émis par les satellites
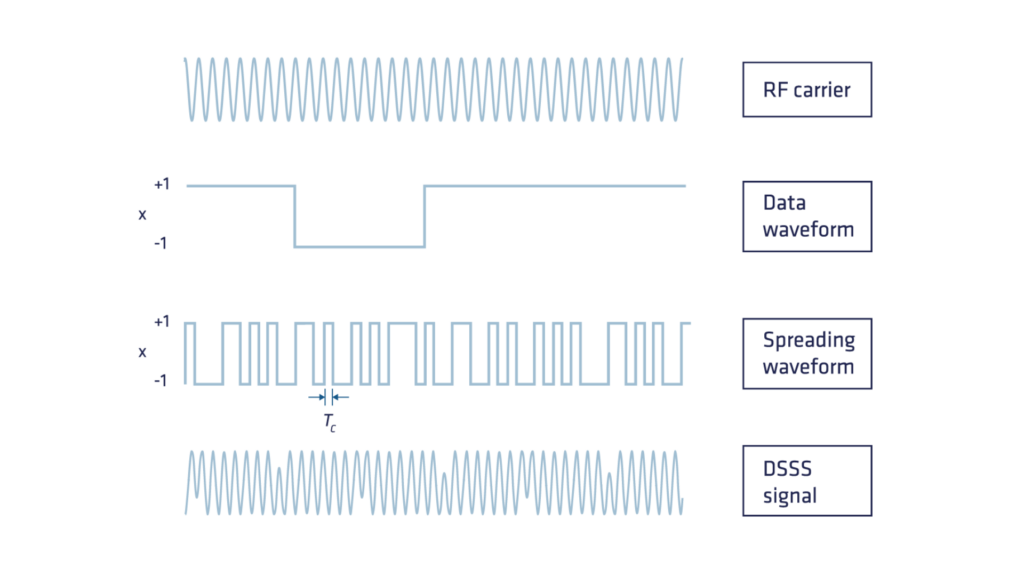
Les satellites GNSS transmettent des signaux sur différentes bandes de fréquences telles que L1, L2, L5, entre autres. Il existe trois composantes de base des signaux GNSS :
- Données de navigation (basse fréquence) : calculées par le segment de contrôle, ces données comprennent des informations essentielles telles que les données d'éphémérides (paramètres orbitaux de Kepler nécessaires au calcul des positions des satellites), les données de correction d'horloge et des informations supplémentaires. Téléchargées sur le satellite et diffusées mondialement aux récepteurs GNSS.
- Code de bruit pseudo-aléatoire ou code PRN : Chaque satellite transmet un code de bruit pseudo-aléatoire (PRN) unique, une séquence déterministe haute fréquence de 0 et de 1 conçue avec un modèle prévisible afin que le récepteur puisse le reproduire. L'avantage clé de l'ajout du code PRN est qu'il permet à plusieurs satellites de transmettre simultanément des signaux dans la même fréquence et d'être reconnaissables par le récepteur. Cette technique, connue sous le nom d'accès multiple par répartition en code (CDMA), attribue à chaque satellite un code pseudo-aléatoire unique. Seul Glonass utilise le FDMA (Frequency Division Multiple Access) où chaque satellite a une fréquence légèrement différente.
- Onde porteuse RF : un signal sinusoïdal initialement conçu pour transporter le signal combiné des données de navigation et du code PRN. Nous verrons plus tard comment ce composant évolue pour devenir la base du signal GNSS, permettant une précision de positionnement au centimètre près.
Mesure de la distance au satellite : code et phase de porteuse
À l'origine, le système GPS a été conçu de telle sorte que le récepteur utilise une réplique du code PRN et des techniques d'auto-corrélation pour calculer la distance satellite-récepteur avec une précision submétrique. Cependant, l'onde porteuse, initialement destinée à la transmission du code PRN, s'est avérée être un atout précieux.
La mesure de la phase porteuse, bien que plus précise, introduit une ambiguïté dans la détermination de la distance entre le satellite et le récepteur. Une exploration plus approfondie des deux mesures est présentée ci-dessous.
Calcul de la distance satellite-récepteur avec le code PRN
Le récepteur GNSS utilise un processus appelé « Delay Lock Loop » pour déterminer le délai entre le code transmis et le code reçu. Ce délai, qui correspond au temps de propagation du signal, est ensuite converti en distance en le multipliant par la vitesse de la lumière.
Cependant, en raison du manque de synchronisation des horloges du récepteur et du satellite, la distance résultante est appelée pseudorange. Outre l'erreur de synchronisation d'horloge, la pseudorange est affectée par plusieurs autres erreurs liées à l'environnement de propagation (atmosphère, matériel, etc.), qui seront abordées plus loin dans l'article.
Amélioration de la distance satellite-récepteur : mesure de la phase porteuse
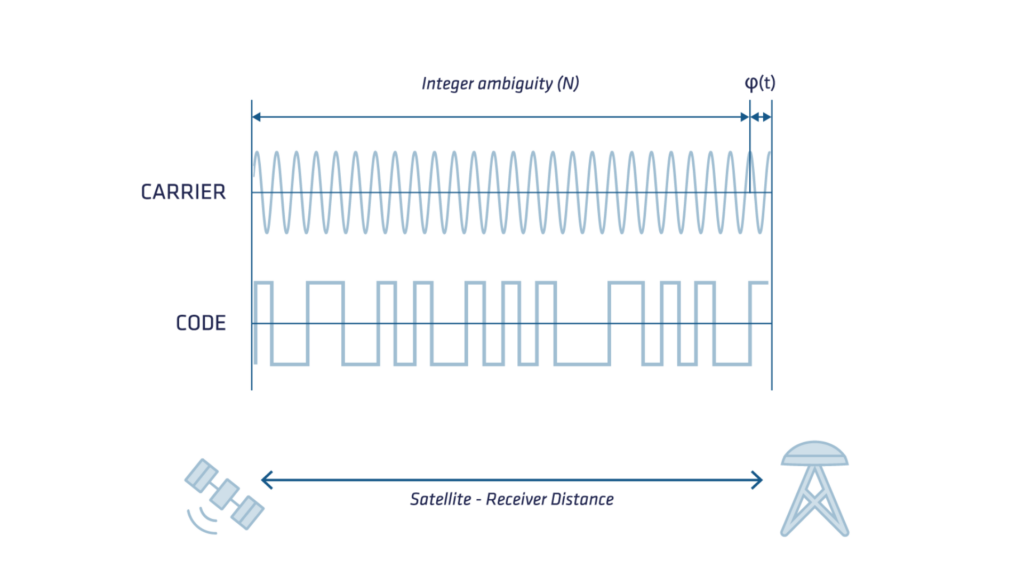
La distance entre le satellite et le récepteur peut également être déterminée en comptant le nombre de cycles de phase écoulés entre l'émission et la réception du signal et en multipliant ce nombre par la longueur d'onde de la porteuse.
Cette mesure est deux ordres de grandeur plus précise que le code, mais un nombre entier constant inconnu de cycles (également appelé ambiguïté) affecte sa précision absolue. Pour déterminer l'évolution précise de la phase de la porteuse, le récepteur GNSS accumule les décalages de fréquence Doppler dans l'onde porteuse, causés par le mouvement relatif du satellite par rapport au récepteur.
En cas d'interruption du signal, ce processus d'accumulation ne peut pas tenir compte du mouvement réel et des sauts brusques dans la mesure, également appelés « cycle slips », peuvent être observés.
La gestion correcte des cycle slips et de l'ambiguïté sont des aspects difficiles et essentiels des techniques de positionnement précises telles que Real Time Kinematics (RTK) et Precise Point Positioning (PPP).
Le schéma suivant montre l'onde porteuse du signal, le code et leurs résolutions respectives.
Sources d'erreurs dans le GNSS
La précision initiale du GPS pour le grand public (non militaire) était d'environ 100 m. Après de nombreuses années d'évolutions (suppression de la disponibilité sélective, déploiement de nouvelles constellations et de systèmes SBAS, nouveaux satellites et nouvelles fréquences), la précision du GNSS autonome est désormais comprise entre 5 m pour les récepteurs GNSS d'entrée de gamme et 1 m pour les récepteurs haut de gamme.
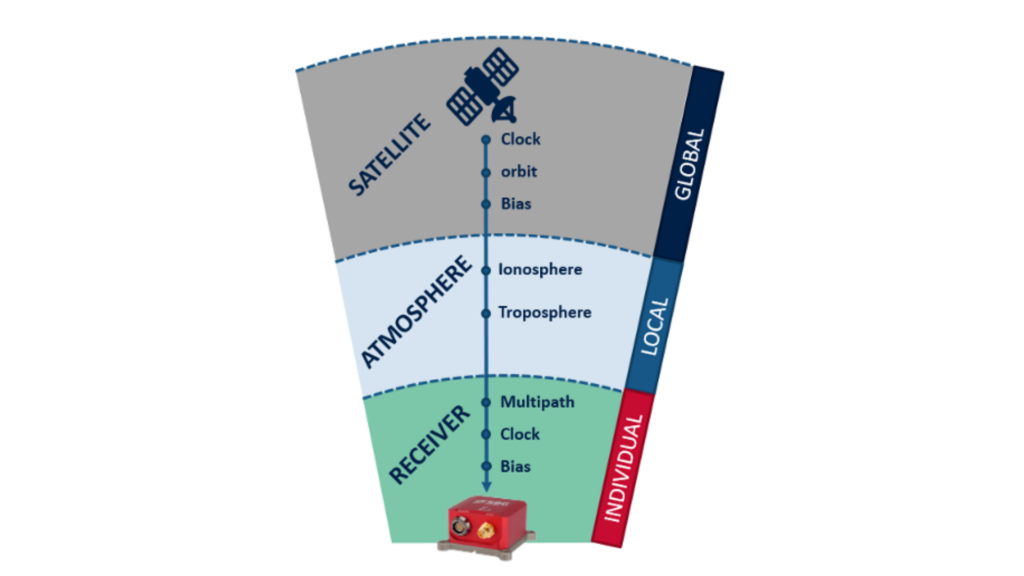
Erreurs des satellites
- Erreurs d'horloge : Bien que les horloges atomiques des satellites GNSS soient très précises, elles subissent une légère dérive. Malheureusement, même un léger écart dans l'horloge du satellite peut entraîner un écart important dans la position calculée par le récepteur. Par exemple, seulement 10 nanosecondes d'erreur d'horloge se traduisent par une erreur de position de 3 mètres sur la mesure de distance !
- Erreurs d'orbite : Bien que les satellites GNSS suivent des orbites très précises et bien documentées, ces orbites subissent de légères variations, similaires aux horloges des satellites. Comme les inexactitudes d'horloge, même un léger changement dans l'orbite du satellite peut entraîner une erreur significative dans la position calculée. Des erreurs résiduelles dans l'orbite persistent, contribuant à des erreurs de position potentielles allant jusqu'à ±2,5 mètres.
Erreurs atmosphériques
- Délai ionosphérique : Située entre 50 et 1 000 km au-dessus de la Terre, l'ionosphère contient des ions chargés qui affectent la transmission des signaux radio, causant des erreurs de position (généralement de ±5 mètres, plus élevées pendant les périodes d'activité ionosphérique accrue). Le délai ionosphérique varie en fonction de l'activité solaire, du moment de la journée, de la saison et de l'emplacement, ce qui rend les prévisions difficiles.
- Délai troposphérique : la couche atmosphérique immédiate de la Terre, la troposphère, subit des variations de délai en raison des changements d’humidité, de température et de pression atmosphérique.
Erreurs du récepteur
L'horloge interne du récepteur, qui est moins précise que l'horloge atomique du satellite, ainsi que d'autres erreurs matérielles et logicielles ajoutent du bruit et du biais aux mesures.
| Délai | Origine | Magnitude |
|---|---|---|
| Erreur de position | Satellite | 5m |
| Décalage d'horloge | Satellite | 0-300 km |
| Délai instrumental | Satellite | 1-10 m |
| Effet relativiste | Satellite | 10 m |
| Délai ionosphérique | Trajet (50-1000 km) | 2-50 m |
| Délai troposphérique | Trajet (0-12 km) | 2-10 m |
| Délai Insturmental | Récepteur | 1-10 m |
| Décalage d'horloge | Récepteur | 0-300 km |
Pour garantir une navigation optimale, le système doit tenir compte de ces erreurs, les atténuer à l'aide d'un modèle d'erreur spécifique ou les estimer à l'aide du filtre de navigation.
Le calcul de la position doit également tenir compte de nombreux autres termes d'erreur non répertoriés dans cet article, tels que les effets de marée et les effets relativistes.
Diverses sources d'erreurs influencent les performances de la technologie GNSS, qui fournit un positionnement, une navigation et une synchronisation très précis.
Des facteurs tels que les retards atmosphériques, les erreurs d'horloge et d'éphémérides des satellites, les interférences multi trajets et le bruit du récepteur peuvent dégrader la précision. Bien que les techniques de correction modernes (GNSS différentiel, RTK et PPP) aident à atténuer le GNSS et ses sources d'erreurs, la compréhension de leurs origines reste essentielle pour optimiser les performances du GNSS.
À mesure que les progrès du traitement du signal, de la fusion de capteurs et de l'apprentissage automatique continuent d'évoluer, les systèmes GNSS deviendront encore plus robustes, assurant une plus grande fiabilité dans diverses applications.