PPK (Post-Processing Kinematic) ist eine GNSS-Datenverarbeitungsmethode, die durch Korrektur von Fehlern in den rohen Positionsdaten eine hochgenaue Positionierung ermöglicht. Post-Processing ist weit verbreitet in Anwendungen, die präzise Geodaten benötigen, wie z. B. Vermessung, Kartierung und UAV-Betrieb.
SBG Systems hat eine eigene GNSS-Post-Processing-Lösung entwickelt, um die Leistung seiner Trägheitsnavigationssysteme zu verbessern.
Was ist GNSS-Post-Processing?
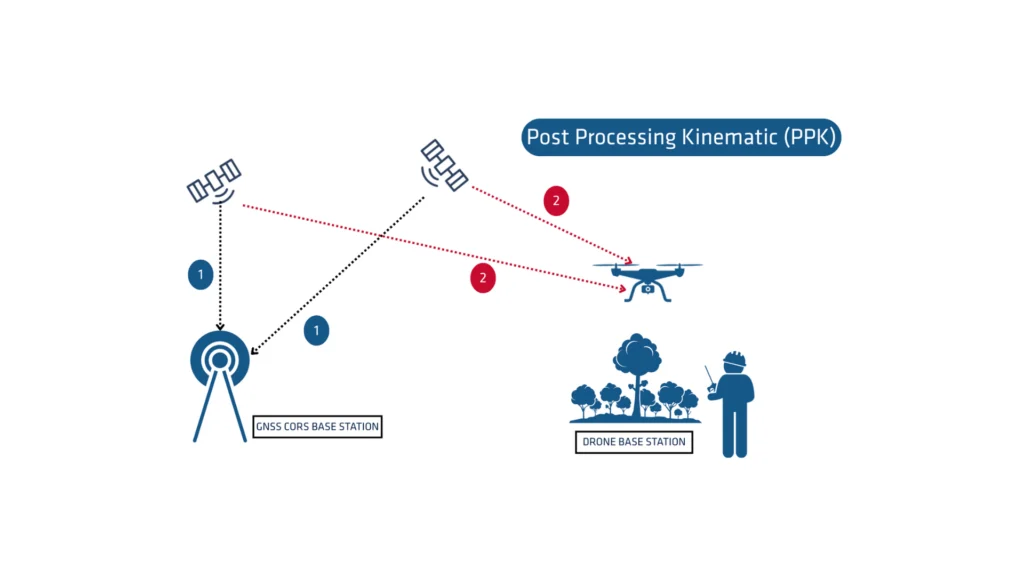
PPK Post-Processing ist ein Ansatz, bei dem das System die GNSS-Rohdatenmessungen verarbeitet, die nach der Datenerfassung auf einem GNSS-Empfänger aufgezeichnet wurden. Sie können mit anderen Quellen von GNSS-Messungen kombiniert werden, um die vollständigste und genaueste kinematische Trajektorie für den GNSS-Empfänger zu erstellen, selbst in den schwierigsten Umgebungen.
Diese anderen Quellen können lokale GNSS-Basisstationen am oder in der Nähe des Datenerfassungsprojekts oder bestehende kontinuierlich arbeitende Referenzstationen (CORS) sein, die typischerweise von Regierungsbehörden und/oder kommerziellen CORS-Netzwerkanbietern angeboten werden.
Eine Post-Processing Kinematic (PPK)-Software kann frei verfügbare GNSS-Satellitenbahn- und Taktinformationen nutzen, um die Genauigkeit weiter zu verbessern. PPK ermöglicht die genaue Bestimmung des Standorts einer lokalen GNSS-Basisstation in einem absoluten globalen Koordinatenreferenzrahmen, den sie verwendet.
PPK-Software kann auch komplexe Transformationen zwischen verschiedenen Koordinatenreferenzrahmen zur Unterstützung von technischen Projekten unterstützen.
Mit anderen Worten, sie bietet Zugang zu Korrekturen, verbessert die Genauigkeit des Projekts und kann sogar Datenverluste oder Fehler während der Vermessung oder Installation nach der Mission beheben.
RTK vs. PPK
Real-Time Kinematic (RTK) ist eine Positionierungstechnik, die GNSS-Korrekturen nahezu in Echtzeit überträgt, in der Regel unter Verwendung eines Korrekturstroms im RTCM-Format. Bei der Sicherstellung der GNSS-Korrekturen, insbesondere ihrer Vollständigkeit, Verfügbarkeit, Abdeckung und Kompatibilität, kann es jedoch zu Problemen kommen.
PPK bietet den großen Vorteil, dass die Datenverarbeitung während des Post-Processings optimiert wird, einschließlich der Vorwärts- und Rückwärtsverarbeitung. Im Gegensatz dazu kann es bei der Echtzeitverarbeitung zu Unterbrechungen oder Inkompatibilitäten bei den Korrekturen und ihrer Übertragung kommen, was zu einer geringeren Genauigkeit der Positionierung führt.
Ein erster wesentlicher Vorteil der GNSS-PPK-Nachverarbeitung gegenüber der Echtzeit (RTK) besteht darin, dass das im Feld eingesetzte System nicht über eine Datenverbindung/Funkgerät verfügen muss, um die von den CORS kommenden RTCM-Korrekturen in das INS einzuspeisen.
Die wichtigste Einschränkung bei der Einführung der Nachverarbeitung ist die Anforderung an die endgültige Anwendung, auf die Umgebung einzuwirken. Wenn Ihre Anwendung jedoch die zusätzliche Verarbeitungszeit verkraften kann, die für die Erstellung einer optimierten Flugbahn erforderlich ist, wird dies die Datenqualität für alle Ihre Ergebnisse erheblich verbessern.
Wie verbessert die Vorwärts- und Rückwärtsverarbeitung die Datengenauigkeit?
Stellen wir uns vor, wir haben einen 60-sekündigen GNSS-Ausfall in der Mitte unserer Erhebung. Der Positionsfehler bei der Vorwärtsverarbeitung wächst schnell (die Rate hängt von den IMU und anderen Parametern ab) und erreicht am Ende des Ausfalls sein Maximum. Danach erholt er sich schnell.
Bei der Nachbearbeitung tun wir so, als ob die Zeit rückwärts fließt, und führen die Bearbeitung in antichronologischer Reihenfolge durch, da die physikalischen Gleichungen gültig bleiben. Bei dieser Rückwärtsverarbeitung wäre der Fehler zu Beginn des GNSS-Ausfalls maximal, und zwar auf sehr symmetrische Weise zur natürlichen Vorwärtsverarbeitung.
Die Zusammenführung dieser beiden Berechnungen führt zu einem maximalen Fehler um die Mitte des Ausfalls herum, mit einer viel geringeren Größenordnung als bei den reinen Vorwärts- oder Rückwärtslösungen.
Dies wird vor allem die INS verbessern, wie sie von den Produkten SBG Systems ermöglicht werden, aber auch die reine GNSS-Verarbeitung profitiert von diesem Arbeitsablauf.
Wie bereits erwähnt, ist die Nachbearbeitung die einzige Möglichkeit, diese Verbesserung zu erreichen, da alle Daten von Anfang bis Ende benötigt werden, was ihre Verwendung bis zum Ende der Vermessung verzögert.
Zugänglich für alle Vermessungsanwendungen
RTK wird häufig für hochpräzise GNSS-Positionierung bei der Kartierung, Baukontrolle und bei maritimen Anwendungen eingesetzt, die Echtzeit-Ergebnisse erfordern. Die Nachbearbeitung von INS kommt UAV- und USV zugute, bei denen die Funkimplementierung und die Überwachung des RTCM-Korrekturstroms eine Herausforderung darstellen.
Vermessungsingenieure aus der Luft verwenden in der Regel PPK, da Datenverbindungen zu Flugzeugen schwierig zu realisieren sind, da Mobilfunknetze aufgrund der Ausrichtung der Bodenantennen in der Höhe schlecht funktionieren.
Andere Anwendungen, die eine kinematische Nachbearbeitung benötigen, sind solche, bei denen Daten (z. B. Bild- oder LiDAR-Daten) in einem nachfolgenden Arbeitsablauf verarbeitet werden, oft in der cloud, und bei denen die Verarbeitung der Flugbahn mit einer GNSS-Nachbearbeitungssoftware wie Qinertia leicht hinzugefügt werden kann.
