UAV flight analysis with miniature inertial sensor
Discover UAV flight analysis for precise wind measurement.
“Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight.” | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

Multi-purpose airborne sensor carrier UAV
MASC is a small UAV developed for atmospheric boundary layer research. Moreover, the Environmental Physics group at Eberhard Karls Universität Tübingen, Germany, designed and operates it. The team chose the Ellipse-N to record UAV position, ground speed, and attitude angles. In addition, wind speed and direction can be accurately calculated by considering airflow.
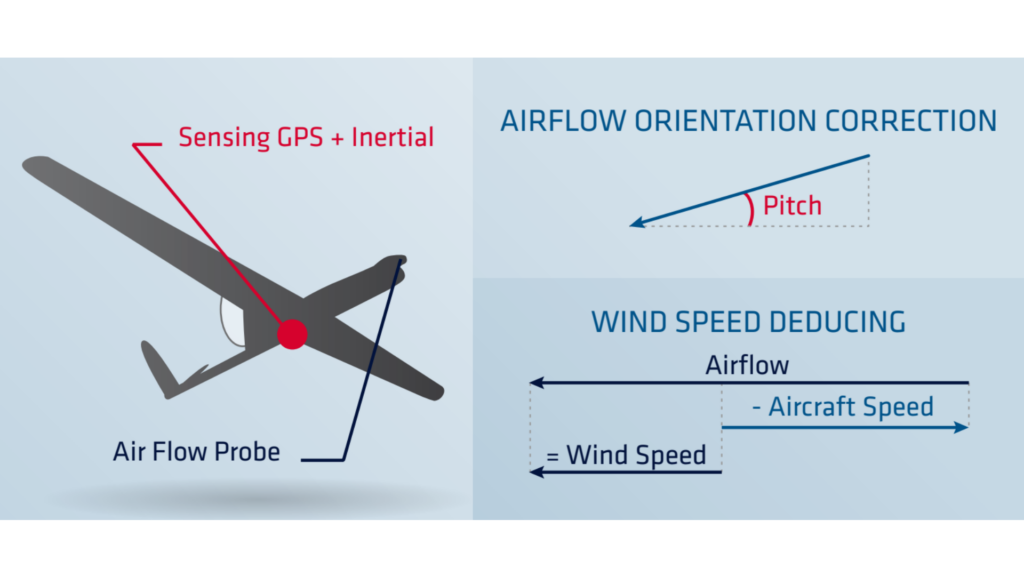
However, in-flight wind computation is challenging because the airflow probe requires compensation for UAV behavior.
Thus, precise inertial measurement becomes essential for accurate flight analysis.
The typical payload for this UAV is a meteorological measurement system, designed to calculate turbulent fluxes.
Compared to terrestrial systems or aircrafts, the MASC UAV is a cost-effective and valuable tool for researches such as wind energy plant site evaluation in complex terrain.
“In-Flight” wind speed computation
In-flight wind computation presents challenges because the embedded airflow probe requires compensation for UAV behavior. Moreover, subtracting UAV ground speed and attitude from the airflow vector calculates wind speed and direction. Thus, a precise inertial measurement unit becomes essential for accurate UAV flight analysis.
Our Ellipse-N: the GPS-aided miniature INS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Small-size and lightweight, the Ellipse-N offers more than attitude and heading measurement. It fuses inertial data with GPS and pressure sensor information to provide a robust position and an enhanced altitude accuracy.
The report showing the sensor dynamic calibration over the full temperature range made the team even more confident that the system would meet the announced specifications.
Ellipse-N high quality data
The Ellipse-N integrated smoothly into the on-board measurement computer through a serial interface. Moreover, this seamless connection enabled efficient data transmission.
While the airflow probe measured airspeed and incident angles, the Ellipse-N recorded UAV position, ground speed, and attitude angles. In addition, the computer stored raw data for later use. Moreover, a telemetry link allowed real-time display on the ground station.
By using this sensor, the system measured wind speed with ±0.5 m/s accuracy across all three axes. Furthermore, it recorded speed variation at up to 20Hz, while the 200Hz output rate removed the need for interpolation.


Discover our Ellipse-N
Ellipse-N is a compact and high-performance RTK Inertial Navigation System (INS) with an integrated Dual band, Quad Constellations GNSS receiver. It provides roll, pitch, heading, and heave, as well as a centimetric GNSS position.
The Ellipse-N sensor works best in dynamic environments and harsh GNSS conditions. Moreover, it also functions in lower dynamic applications with magnetic heading.

Ask a quotation for Ellipse-N
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
How to control output delays in UAV operations?
Controlling output delays in UAV operations is essential for ensuring responsive performance, precise navigation, and effective communication, especially in defense or mission-critical applications.
The output latency is an important aspect in real time control applications, where a higher output latency could degrade control loops performance. Our INS embedded software has been designed to minimize output latency: once sensor data are sampled, the Extended Kalman Filter (EKF) performs small and constant-time computations before the outputs are generated. Typically the observed output delay is less than one millisecond.
The processing latency should be added to the data transmission latency if you want to get total delay. This transmission latency vary from one interface to another. For instance, a 50 bytes message sent on a UART interface at 115200 bps will take 4ms for complete transmission. Consider higher baudrates to minimize output latency.
Do UAVs use GPS?
Unmanned Aerial Vehicles (UAVs), commonly known as drones, typically use Global Positioning System (GPS) technology for navigation and positioning.
GPS is an essential component of a UAV’s navigation system, providing real-time location data that enables the drone to determine its position accurately and execute various tasks.
In recently years, this term has been replaced by a new term GNSS (Global Navigation Satellite System). GNSS refers to the general category of satellite navigation systems, which encompasses GPS and various other systems. In contrast, GPS is a specific type of GNSS developed by the United States.
What is UAV geofencing?
UAV geofencing is a virtual barrier that defines specific geographic boundaries within which an unmanned aerial vehicle (UAV) can operate.
This technology plays a critical role in enhancing the safety, security, and compliance of drone operations, particularly in areas where flight activities may pose risks to people, property, or restricted airspace.
In industries like delivery services, construction, and agriculture, geofencing helps ensure that drones operate within safe and legal areas, avoiding potential conflicts and enhancing operational efficiency.
Law enforcement and emergency services can use geofencing to manage UAV operations during public events or emergencies, ensuring drones do not enter sensitive areas.
Geofencing can be employed to protect wildlife and natural resources by restricting drone access to certain habitats or conservation areas.
What is a payload?
A payload refers to any equipment, device, or material that a vehicle (drone, vessel …) carries to perform its intended purpose beyond the basic functions. The payload is separate from the components required for the vehicle operation, such as its motors, battery, and frame.
Examples of Payloads:
- Cameras: high-resolution cameras, thermal imaging cameras…
- Sensors: LiDAR, hyperspectral sensors, chemical sensors…
- Communication equipment: radios, signal repeaters…
- Scientific instruments: weather sensors, air samplers…
- Other specialized equipment
