
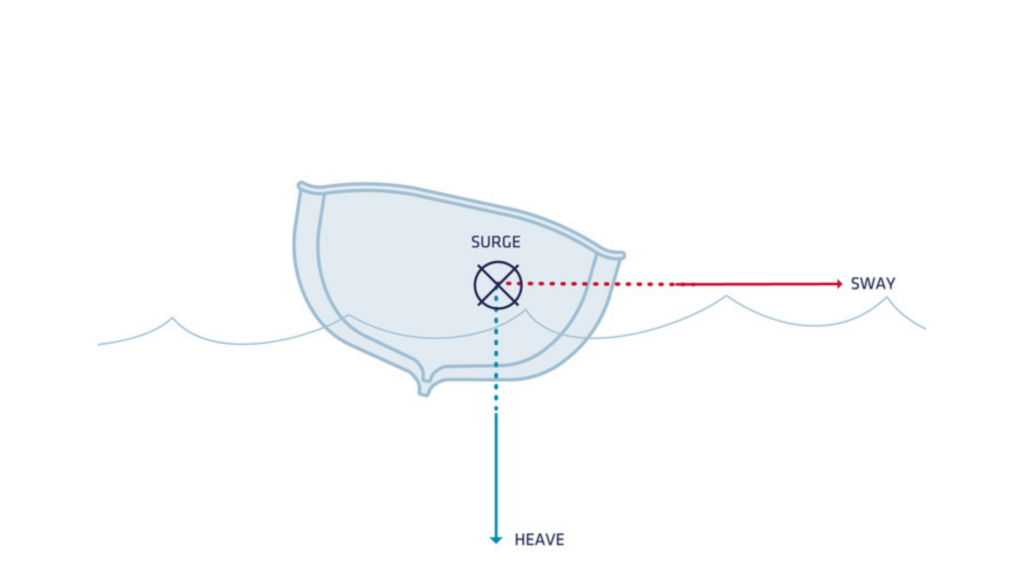
ヒーブは、海洋用途に特化した運動測定である。波浪による船舶の上下動を指し、船舶の重心位置での平均値をゼロと仮定し、局所的な鉛直軸に沿った線形変位として測定されます。
リアルタイム・ヒーブアルゴリズムとディレイド・ヒーブアルゴリズムの大幅なアップグレードが行われました。
ヒーブアルゴリズムの詳細と正しい設定方法については、サポートセンターのナレッジベースページをご覧ください。
最近の動向
私たちの現在のリアルタイムおよび遅延ヒーブアルゴリズムは、すでに業界をリードするものであり、最高の仕様を持っています。しかし、その精度をさらに向上させるために、大幅な改良を加えました。ファームウェア・バージョン5.1で導入された最新の改良は、回転中心(COR)からIMU (慣性計測ユニット)までの距離を使用するもので、その結果、リアルタイム・ヒーブ・アルゴリズムとディレイド・ヒーブ・アルゴリズムの両方に次のような利点があります:
- パフォーマンスの向上:
- リアルタイムのヒーブ精度は5cmから4cmに向上した。
- 遅延ヒーブの精度は2.5cmから2cmに向上した。
- IMU 柔軟な設置:CORまでの距離さえあれば、船上のどこにでもIMU 設置できるようになりました。これは、IMU 船舶のCORの近くに設置する必要があり、大型船舶にとっては困難であった以前のバージョンと比較して、大きな改善です。
- 厳しい海象条件下での操作性向上:より厳しい海象条件下でも完全な性能を維持。
新しいアルゴリズムの適格性
特に高精度を目指す場合、ヒーブ性能の認定は本質的に難しい。私たちがどのように対処したかを紹介しよう:
評価プロセス
私たちは、同じ海底地域を繰り返し通過して得られた水深データセットの比較を含む、複数の評価を実施しました。これらの評価は、顧客でありパートナーでもあるNorbit社によって進められた。
- 水深評価:同一海域の複数のサーベイ ラインを比較することで、ヒーブ性能の上限を設定。この方法は、INS 位置と角度測定、マルチビームソナー、その他のソースからの誤差を含む、捕捉チェーン全体の誤差を考慮したものです。
- 後処理の検証:Qinertiaの後処理されたGNSSデータを使って、新しい遅延ヒーブアルゴリズムもテストしました。その結果、新しいアルゴリズムはRTKに匹敵する性能を示しました。
結果と結論
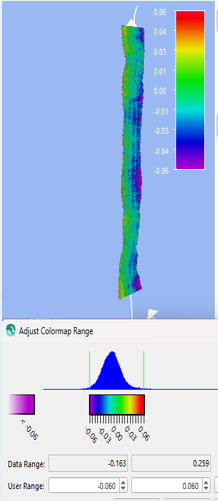
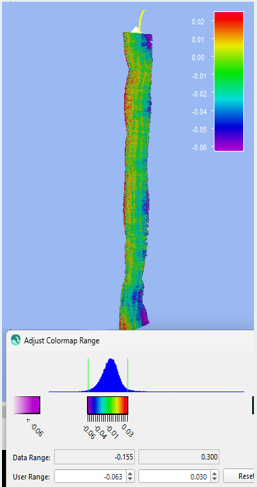
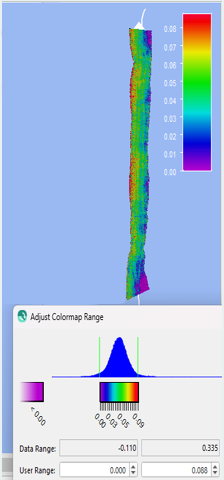
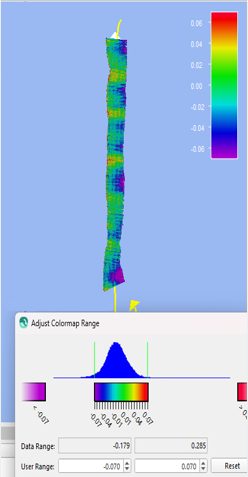
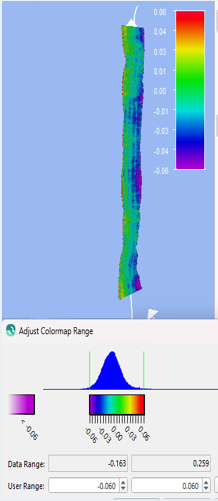
以下のスクリーンショットは、新旧アルゴリズムのバージョンを並べて比較したものです。カラースケールは異なりますが、提供された統計は明らかに改善を示していることに注意してください。古いヒーブアルゴリズムでは、異常な海況や大型船のセットアップによる視覚的なアーチファクトがあったにもかかわらず、値が仕様内にとどまっていたことは注目に値します。
新旧アルゴリズムバージョンの比較
これらの評価により、私たちの新しいヒーブ・アルゴリズムの性能が大幅に向上し、さまざまな条件下で優れた精度と信頼性が得られることが確認されました。
リアルタイムおよび遅延ヒーブ測定の改善
性能の向上は以下の表にまとめられており、リアルタイムと遅延ヒーブ測定の両方で明らかな改善が見られます。
| 古いリアルタイム・ヒーブ | 新しいリアルタイム・ヒーブ | オールド・ディレイド・ヒーブ | 新しいディレイド・ヒーブ | PPKリファレンス | |
|---|---|---|---|---|---|
| 平均 | 4cm | 3cm | 4cm | 1cm | 1cm |
| 標準偏差 | 4cm | 2cm | 2cm | 2cm | 2cm |
これらの機能強化により、高性能な製品ラインアップが保証される:
- リアルタイム・ヒーブ・アプリケーションは4cmの精度を達成する。
- 遅延ヒーブと互換性があり、主要な水路測量ソフトウェア・パッケージでサポートされているマッピング・アプリケーションは、2cmの精度を達成する。
さらに、海洋ユニットで利用可能なヒーブ強調高度機能は、これらの改良の恩恵を受けます。これらの改良はすべて、Qinertia 4ポスト処理ソフトウェアとファームウェアバージョン5.1以降の高性能製品で利用可能です。これらの改良は、間もなくEllipse製品群にも適用される予定です。