仮想基準点(VRS)は、リアルタイムの位置決め精度を向上させるために設計されたシミュレートされたGNSS基準点です。継続的に動作する基準局(CORS)のネットワークからのデータを活用することにより、VRSはローカライズされた補正信号を作成し、空間誤差を減らし、RTK(リアルタイムキネマティック)の精度を向上させます。これにより、ユーザーは、基準局が正確な場所に配置されているかのように、センチメートルレベルの精度を実現できます。
GNSSテクノロジーは、測量、マッピング、および地理空間データ収集に革命をもたらし、高速で非常に正確な位置決めを提供します。ただし、大気干渉、信号障害、および専用基地局の必要性などの課題により、精度と効率が制限される可能性があります。VRSは、測量現場に物理的なインフラストラクチャを必要とせずに、シームレスな補正データを提供することにより、これらの障害を排除します。
VRSを利用することにより、土地測量、建設、UAVマッピング、および自律航法の専門家は、都市景観や遠隔地などの複雑な環境でも、精度の向上、ワークフローの合理化、および生産性の向上から恩恵を受けることができます。
VRSはどのように機能しますか?
仮想基準点(VRS)は、ユーザーの特定の位置に合わせてカスタマイズされた補正信号を生成することで、GNSS の精度を向上させます。VRS の動作に関する段階的なプロセスリストをご用意しました。
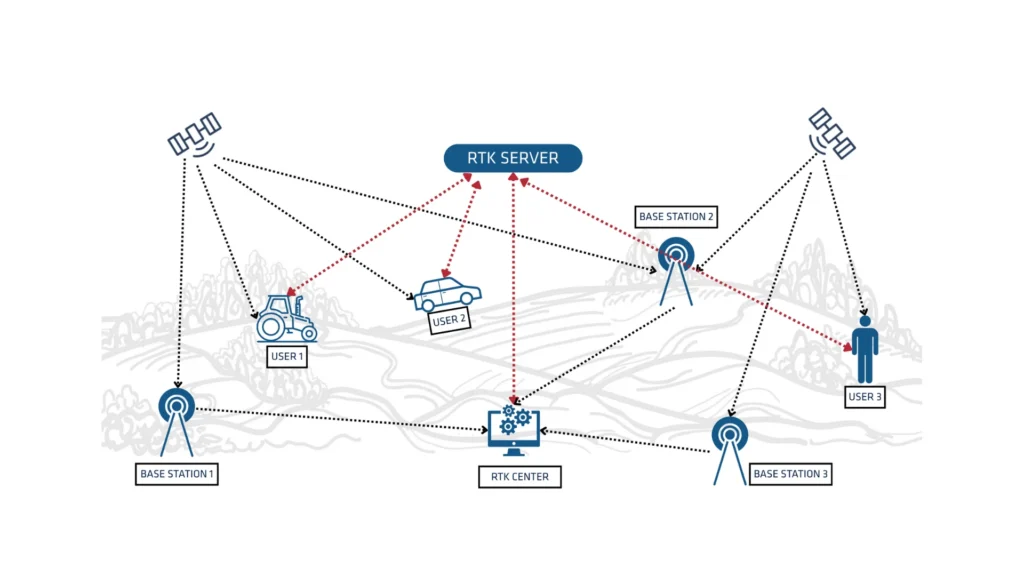
- ネットワークデータ収集:複数の基準局が継続的に衛星信号を受信し、誤差を監視します。
- 補正データ生成: 中央サーバーがこのデータを処理して、特定の場所に対する補正係数を計算します。
- ユーザー接続: GNSS ローバー(測量士の機器、UAV、または自律走行車など)は、インターネットまたはモバイルデータリンクを介して VRS ネットワークに接続します。
- 位置精度の向上:システムはユーザーの近くに仮想基準局を生成し、まるで物理的な基地局がその場所にあるかのように、リアルタイムの補正を提供します。
VRSの利点
VRSは、サーベイ、マッピング、UAVナビゲーション、および以下のような自律システムを含む、様々な産業において数多くの利点を提供します。
- 物理的な基地局が不要:セットアップ時間とコストを削減します。
- 精度の向上: 大気擾乱、衛星軌道誤差、およびクロックドリフトによって引き起こされる GNSS エラーを修正します。
- カバレッジの拡大:シングルベースRTKセットアップと比較して、より広いエリアで動作します。
- 効率性の向上:土地のサーベイ、精密農業、UAVマッピング、自動運転車のナビゲーションなどの用途に最適です。
VRS テクノロジーを活用することで、ユーザーは従来の GNSS 基地局のロジスティック上の課題なしに、リアルタイムで高精度の測位を実現できます。このアプリケーションのいくつかをご覧ください。
