





Navsight Marine Solution de navigation pour les applications hydrographiques
Navsight Navsight Marine intègre les dernières technologies IMU et GNSS pour offrir une solution de mouvement et de navigation complète, puissante et conviviale aux hydrographes.
Facile à installer et très polyvalent, Navsight Marine facilite les tâches des hydrographes en eaux peu profondes comme en eaux profondes.
Navsight est une solution modulaire composée de différents éléments : une unité de traitement, un choix de capteurs déportés, des câbles et des antennes, pour répondre à vos besoins spécifiques.
L'IMU est l'élément de détection principal et le facteur déterminant le plus important en termes de performances. Si les conditions GNSS sont favorables et que vous travaillez en eau peu profonde, choisissez l'IMU Ekinox grade . Pour les conditions difficiles, comme les environnements GNSS médiocres ou les profondeurs extrêmes, choisissez les capteurs Apogee ou Horizon grade pour garantir une précision maximale.
Découvrez toutes les caractéristiques et applications de Navsight Marine .
Caractéristiques de Navsight Marine
Navsight est une solution complète de navigation inertielle conçue pour l'industrie des levés, combinant les capteurs inertiels éprouvés de SBG Systems, des algorithmes avancés exclusifs et une technologie GNSS de haute performance avec une configuration conviviale. Conçu pour s'adapter à diverses applications, Navsight offre des performances évolutives grâce à trois niveaux distincts.
Le niveau IMU Ekinox est une option compacte, économique et à faible consommation, idéale pour les levés en eaux peu profondes. Pour les environnements exigeants avec des pannes GNSS, la qualité IMU Apogee offre des performances supérieures pour les eaux peu profondes et profondes. La qualité IMU Horizon offre les meilleures performances, avec des gyroscopes à fibre optique en boucle ferméeFOG qui garantissent un biais gyroscopique très faible, idéal pour les grands navires, les levés à grande profondeur et les conditions difficiles avec une dérive minimale.
Navsight est également livré avec une unité de traitement rackable pour une intégration facile dans un rack standard de 19 pouces, équipé de connecteurs standard RJ-45 et DB-9 pour une installation rapide.
Navsight Marine est conçu et fabriqué en France et ne fait l'objet d'aucune restriction à l'exportation (ITAR Free).
Découvrez comment Navsight Marine peut améliorer vos capacités de levés hydrographiques grâce à ses solutions polyvalentes et de haute précision.




Applications
Les applications hydrographiques exigent une précision et une adaptabilité exceptionnelles en raison des environnements difficiles rencontrés lors de la collecte de données marines et sous-marines. Des facteurs tels que le mouvement des vagues, les marées, les courants et les profondeurs variables créent des obstacles uniques à la cartographie précise des fonds marins, aux levés bathymétriques et à l'analyse des voies navigables.
La solutionNavsight Marine est conçue pour ces environnements exigeants. Conçu pour s'intégrer parfaitement aux sondeurs multifaisceaux et aux autres équipements et logiciels de relevé, Navsight associe une technologie de navigation inertielle avancée au positionnement GNSS pour fournir des données précises en temps réel (RTK).
La conception robuste et le format pratique de Navsight permettent de l'installer facilement sur différents types de navires, des petits bateaux de relevé aux grands navires de recherche.
Découvrez toutes les applications Navsight Marine .
Nos études de cas
Explorez des cas d'utilisation réels démontrant comment nos Navsight Marine améliorent les performances, réduisent les temps d'arrêt et améliorent l'efficacité opérationnelle. Découvrez comment nos capteurs avancés et nos interfaces intuitives vous apportent la précision et le contrôle dont vous avez besoin pour exceller dans vos applications.


Nos différentes versions
Comparez notre gamme de capteurs inertiels les plus avancés pour la navigation, le mouvement et la détection du pilonnement.
Les spécifications complètes se trouvent dans la brochure du produit disponible sur demande.
| Position horizontale RTK | Position horizontale RTK 0,01 m + 0,5 ppm | Position horizontale RTK 0,01 m + 0,5 ppm | Position horizontale RTK 0,01 m + 0,5 ppm |
|---|---|---|---|
| tangage RTK | RTK tangage 0.015 ° | RTK tangage 0.008 ° | RTK tangage 0.007 ° |
| Cap RTK | Cap RTK 0.02 ° | Cap RTK 0.01 ° | Cap RTK 0.01 ° |
| Récepteur GNSS | Récepteur GNSS Double antenne géodésique interne | Récepteur GNSS Double antenne géodésique interne | Récepteur GNSS Double antenne géodésique interne |
| Poids (g) | Poids (g) 1 940 g | Poids (g) 1 940 g | Poids (g) 1 940 g |
| Dimensions (LxLxH) | Dimensions (LxLxH) 227 x 156 x 63 mm | Dimensions (LxLxH) 227 x 156 x 63 mm | Dimensions (LxLxH) 233 x 156 x 63 mm |
Compatibilité
Documentation et ressources Navsight Marine
Navsight Marine est livré avec une documentation complète, conçue pour aider les utilisateurs à chaque étape.
Des guides d'installation à la configuration avancée et au dépannage, notre documentation en ligne claire et détaillée garantit une intégration et un fonctionnement sans heurts.
Autres produits et accessoires
Découvrez comment nos solutions de systèmes pour géomètres peuvent transformer vos opérations en explorant notre gamme variée d'applications. Grâce à nos capteurs et logiciels de mouvement et de navigation, vous avez accès à des technologies de pointe qui favorisent la réussite et l'innovation dans votre domaine.
Rejoignez-nous pour libérer le potentiel des solutions de navigation et de positionnement inertiel dans divers secteurs d'activité.

Processus de production de Navsight Marine
Découvrez la précision et l'expertise qui se cachent derrière chaque produit SBG Systems . Cette vidéo offre un aperçu de la façon dont nous concevons, fabriquons, calibrons et testons méticuleusement nos systèmes de navigation inertielle haute performance.
De l'ingénierie avancée au contrôle qualité rigoureux, notre processus de production garantit que chaque produit répond aux normes les plus élevées de fiabilité et de précision.
Que vous soyez curieux de la technologie ou intéressé par la façon dont nous donnons vie à des solutions innovantes, cette vidéo met en évidence notre engagement envers l'excellence à chaque étape du processus de production.

Demander un devis
Ils parlent de nous
Découvrez les expériences et les témoignages de professionnels de l'industrie et de clients qui ont utilisé Navsight Marine dans leurs projets.
Leurs commentaires reflètent la qualité et la performance de nos produits, soulignant leur rôle en tant que solution de confiance sur le terrain.
Découvrez comment notre technologie innovante a transformé leurs opérations, amélioré leur productivité et fourni des résultats fiables dans diverses applications.
Avez-vous des questions ?
Bienvenue dans notre section FAQ, où nous répondons à vos questions les plus urgentes sur notre technologie de pointe et ses applications. Vous y trouverez des réponses complètes sur les caractéristiques des produits, les processus d'installation et les meilleures pratiques pour optimiser votre expérience avec Navsight Marine.
Trouvez vos réponses ici !
Qu'est-ce qu'un capteur de mesure d'ondes ?
Les capteurs de mesure des vagues sont des outils essentiels pour comprendre la dynamique des océans et améliorer la sécurité et l'efficacité des opérations maritimes. En fournissant des données précises et opportunes sur les conditions des vagues, ils aident à prendre des décisions éclairées dans divers secteurs, de la navigation à la préservation de l'environnement. Les bouées à vagues sont des dispositifs flottants équipés de capteurs qui mesurent les paramètres des vagues tels que la hauteur, la période et la direction.
Ils utilisent généralement des accéléromètres ou des gyroscopes pour détecter le mouvement des vagues et peuvent transmettre des données en temps réel à des installations à terre pour analyse.
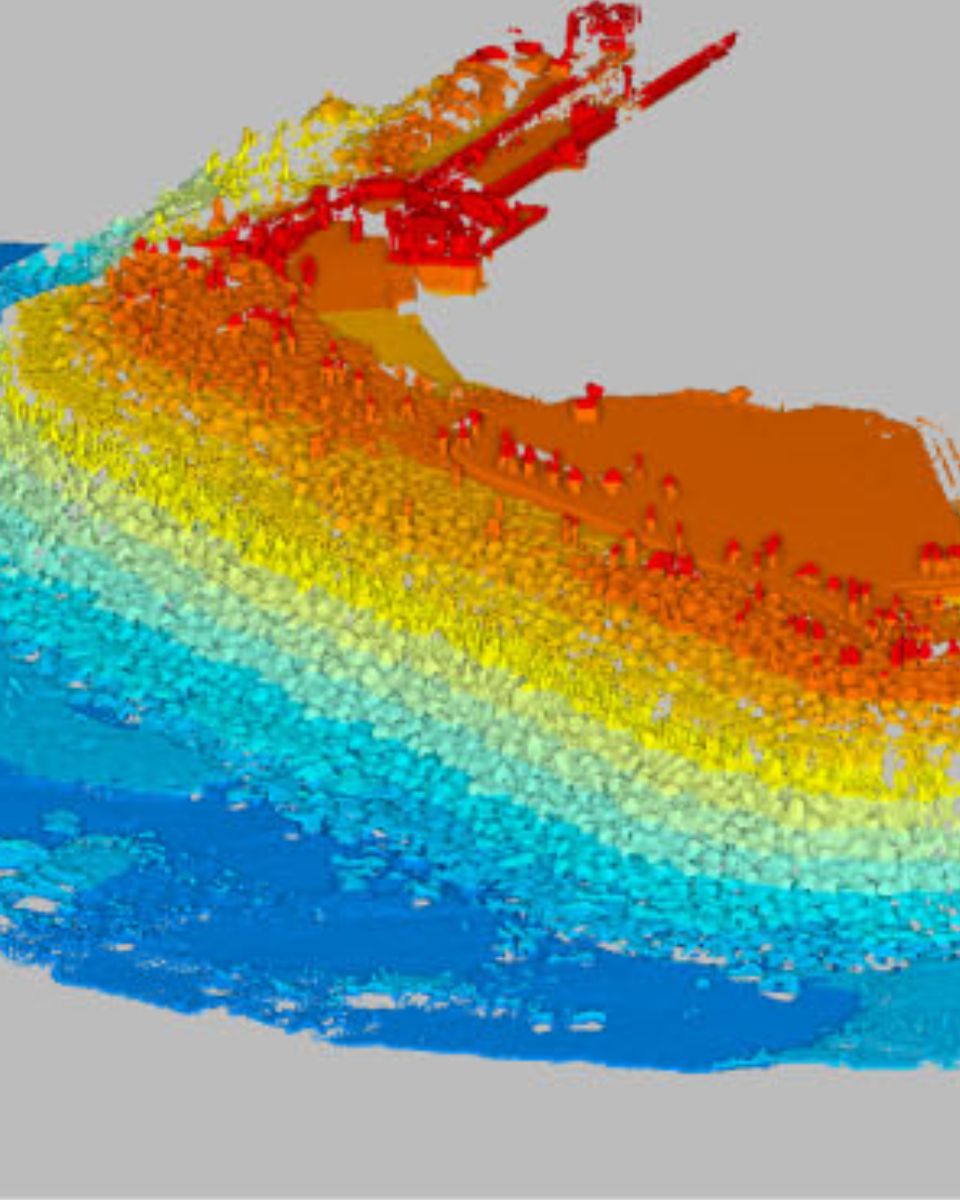
Qu'est-ce que l'échosondage multifaisceaux ?
L'échosondage multifaisceaux (MBES) est une technique hydrographique avancée utilisée pour cartographier le fond marin et les caractéristiques sous-marines avec une grande précision.
Contrairement aux échosondeurs traditionnels à faisceau unique qui mesurent la profondeur en un seul point directement sous le navire, le MBES utilise un ensemble de faisceaux sonar pour mesurer simultanément la profondeur sur une large bande du fond marin. Cela permet d'obtenir une cartographie détaillée et à haute résolution du terrain sous-marin, y compris la topographie, les caractéristiques géologiques et les dangers potentiels.
Les systèmes MBES émettent des ondes sonores qui se propagent dans l'eau, rebondissent sur le fond marin et reviennent vers le navire. En analysant le temps de retour des échos, le système calcule la profondeur en plusieurs points, créant ainsi une carte complète du paysage sous-marin.
Cette technologie est essentielle pour diverses applications, notamment la navigation, la construction maritime, la surveillance de l'environnement et l'exploration des ressources. Elle fournit des données cruciales pour la sécurité des opérations maritimes et la gestion durable des ressources marines.
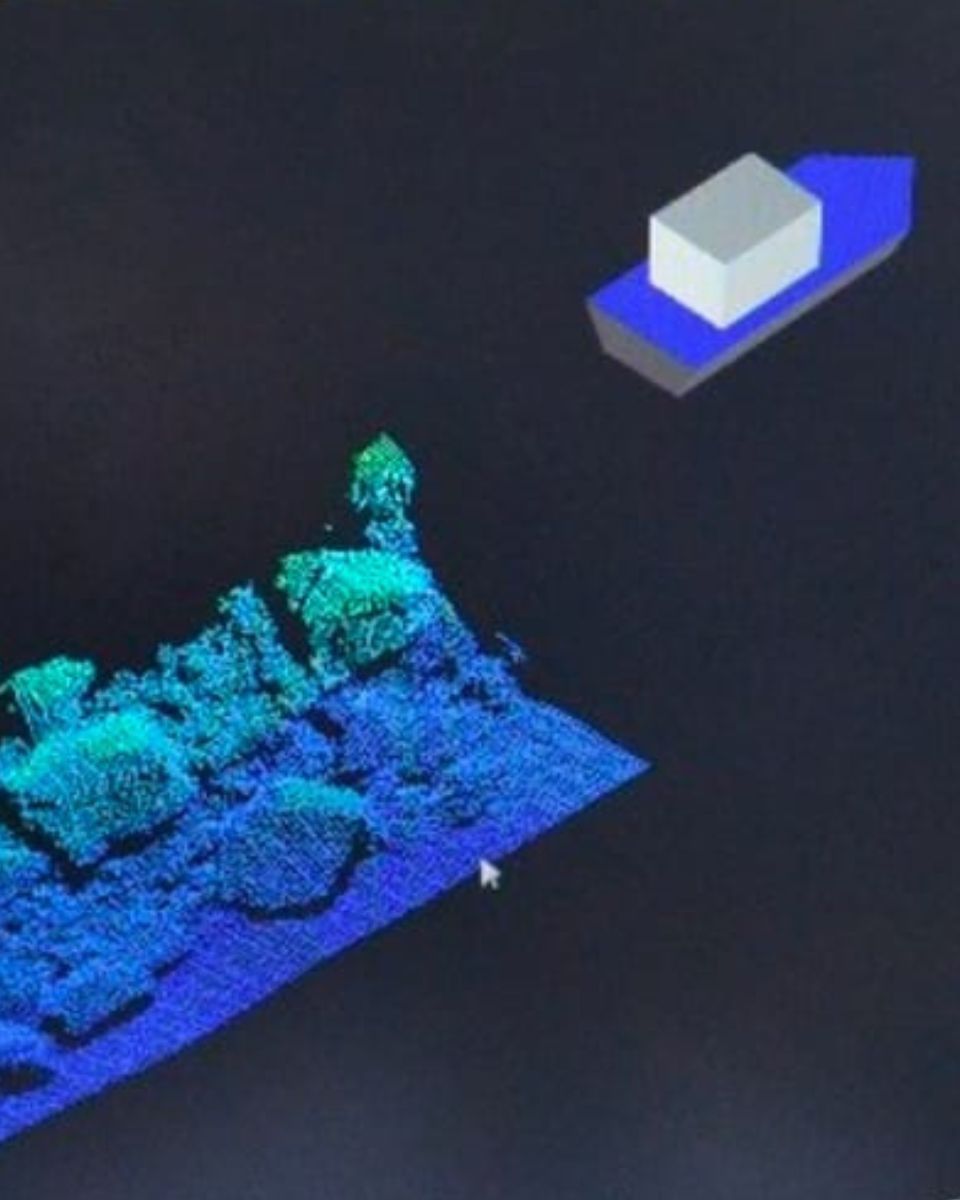
Qu'est-ce que la bathymétrie ?
La bathymétrie est l'étude et la mesure de la profondeur et de la forme des terrains sous-marins, principalement axées sur la cartographie des fonds marins et d'autres paysages submergés. C'est l'équivalent sous-marin de la topographie, qui fournit des informations détaillées sur les caractéristiques sous-marines des océans, des mers, des lacs et des rivières. La bathymétrie joue un rôle crucial dans diverses applications, notamment la navigation, la construction maritime, l'exploration des ressources et les études environnementales.
Les techniques bathymétriques modernes s'appuient sur des systèmes sonar, tels que les échosondeurs monofaisceau et multifaisceaux, qui utilisent les ondes sonores pour mesurer la profondeur de l'eau. Ces appareils envoient des impulsions sonores vers le fond marin et enregistrent le temps de retour des échos, calculant ainsi la profondeur en fonction de la vitesse du son dans l'eau. Les échosondeurs multifaisceaux, en particulier, permettent de cartographier en une seule fois de larges zones du fond marin, fournissant ainsi des représentations très détaillées et précises du fond marin. Souvent, une solution RTK + INS est associée pour créer des représentations bathymétriques 3D des fonds marins avec un positionnement précis.
Les données bathymétriques sont essentielles à la création des cartes marines, qui aident à guider les navires en toute sécurité en identifiant les dangers sous-marins potentiels tels que les rochers submergés, les épaves et les bancs de sable. Elles jouent également un rôle essentiel dans la recherche scientifique, en aidant les chercheurs à comprendre les caractéristiques géologiques sous-marines, les courants océaniques et les écosystèmes marins.
Qu'est-ce que la prospection hydrographique ?
Les levés hydrographiques consistent à mesurer et à cartographier les caractéristiques physiques des masses d'eau, y compris les océans, les rivières, les lacs et les zones côtières. Il s'agit de collecter des données relatives à la profondeur, à la forme et aux contours des fonds marins (cartographie des fonds marins), ainsi qu'à l'emplacement des objets immergés, des dangers pour la navigation et d'autres caractéristiques sous-marines (par exemple, les fosses d'eau). Les levés hydrographiques sont essentiels pour diverses applications, notamment la sécurité de la navigation, la gestion des côtes et les levés côtiers, la construction et la surveillance de l'environnement.
Les levés hydrographiques comportent plusieurs éléments clés, à commencer par la bathymétrie, qui mesure la profondeur de l'eau et la topographie du fond marin à l'aide de systèmes sonar tels que les échosondeurs monofaisceau ou multifaisceaux, qui envoient des impulsions sonores au fond marin et mesurent le temps de retour de l'écho.
Un positionnement précis est essentiel, réalisé à l'aide de systèmes mondiaux de navigation par satellite (GNSS) et de systèmes de navigation inertielle (INS) pour relier les mesures de profondeur à des coordonnées géographiques précises. En outre, les données relatives à la colonne d'eau, telles que la température, la salinité et les courants, sont mesurées et les données géophysiques sont collectées pour détecter les objets, les obstacles ou les dangers sous-marins à l'aide d'outils tels que le sonar à balayage latéral et les magnétomètres.