Las Unidades de Medición Inercial (IMU) son componentes fundamentales en los sistemas modernos de navegación y seguimiento de movimiento.
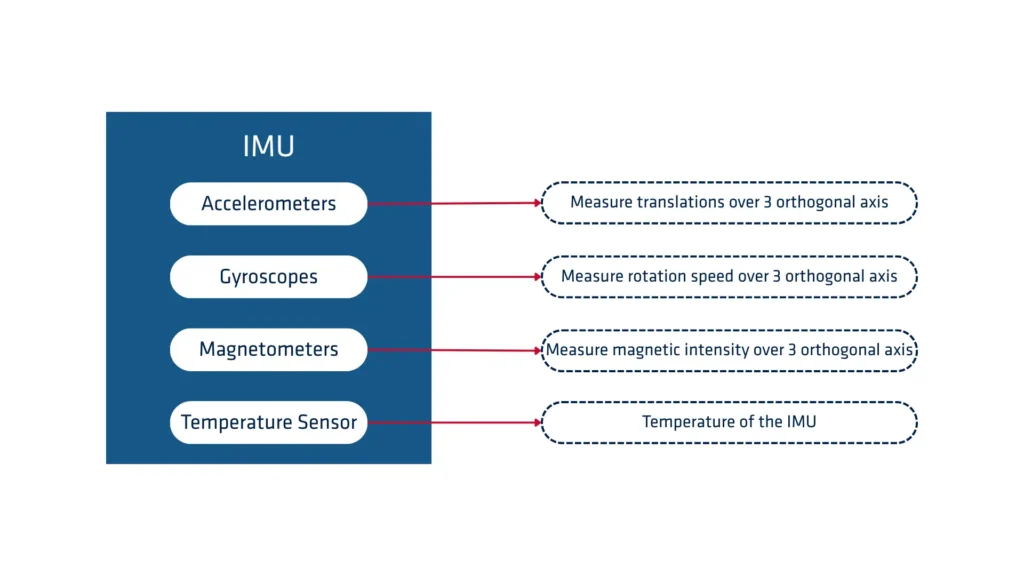
Una Unidad de Medición Inercial (IMU) es un dispositivo electrónico que mide e informa de la fuerza específica, la velocidad angular y, a veces, el campo magnético que rodea a un cuerpo, utilizando una combinación de acelerómetros, giroscopios y, a veces, magnetómetros.
Las IMU son fundamentales para rastrear y controlar la posición y la orientación de varios objetos, desde aviones y barcos hasta teléfonos inteligentes y mandos de juegos.
Existen diferentes tipos de sensores IMU: los basados en FOG (giroscopio de fibra óptica), las IMU RLG (giroscopio láser de anillo) y, por último, las IMU basadas en la tecnología MEMS (sistemas microelectromecánicos). Esta tecnología permite reducir los costes y los requisitos de energía, garantizando al mismo tiempo el rendimiento. Por lo tanto, los sistemas basados en MEMS combinan un alto rendimiento y un consumo ultrabajo en una unidad más pequeña.
El sistema proporciona datos brutos a 1 KHz para aplicaciones exigentes en tiempo real.
¿Cómo elegir la mejor IMU?
Al elegir la mejor IMU para sus necesidades, deben tenerse en cuenta varios factores para garantizar una alta precisión, fiabilidad y rendimiento. El primer factor es la precisión del sensor, que repercute directamente en la precisión de las mediciones.
Las IMU de alta calidad tienen una baja desviación, deriva y ruido, lo que garantiza que los datos que proporcionan sean precisos y estables a lo largo del tiempo. La calibración también es crucial, ya que los sensores bien calibrados minimizan la acumulación de errores, especialmente en entornos dinámicos.
El rango y la resolución de los sensores de la IMU también son importantes. Dependiendo de su aplicación, es posible que necesite una IMU con un amplio rango dinámico para manejar condiciones extremas, o una con alta resolución para mediciones precisas en movimientos más pequeños.
El consumo de energía es otra consideración crítica, especialmente para los sistemas que funcionan con baterías, como los drones y los vehículos autónomos. Una IMU de bajo consumo prolonga el tiempo de funcionamiento y reduce los costes energéticos, lo que la hace más eficiente para misiones de larga duración.
La durabilidad es esencial. Las IMU diseñadas para entornos hostiles, como las que se utilizan en defensa o aeroespacial, deben ser lo suficientemente robustas como para soportar las fluctuaciones de temperatura, las vibraciones y los golpes. Además, tenga en cuenta el factor de forma y la compatibilidad de la integración.
Las IMU más pequeñas y ligeras funcionan mejor para dispositivos portátiles o sistemas no tripulados, mientras que los sistemas más grandes son necesarios para aplicaciones más robustas.
Por último, la elección de un fabricante de confianza con un historial probado en el suministro de IMU de alto rendimiento garantiza que obtendrá un producto fiable que satisfaga sus necesidades de seguimiento del movimiento preciso y exacto.