El postprocesamiento de datos consiste en analizar y corregir los datos registrados una vez finalizado el estudio o la misión. Este método mejora la precisión y la fiabilidad. En los sistemas de navegación y posicionamiento, especialmente los GNSS, el postprocesamiento elimina el ruido y aplica correcciones a las mediciones brutas. Los ingenieros utilizan el postprocesamiento para corregir desviaciones, reducir errores y perfeccionar los resultados de posicionamiento. Es especialmente útil en zonas con poca cobertura de satélite o interrupciones de señal.
El postprocesamiento se basa en datos almacenados. Esto incluye señales de satélite GNSS, mediciones inerciales y correcciones de la estación base. Los ingenieros procesan los datos fuera de línea utilizando software especializado. Este software aplica modelos matemáticos para mejorar la posición o trayectoria final. El resultado es una trayectoria o un conjunto de mediciones más precisos que los obtenidos en tiempo real.
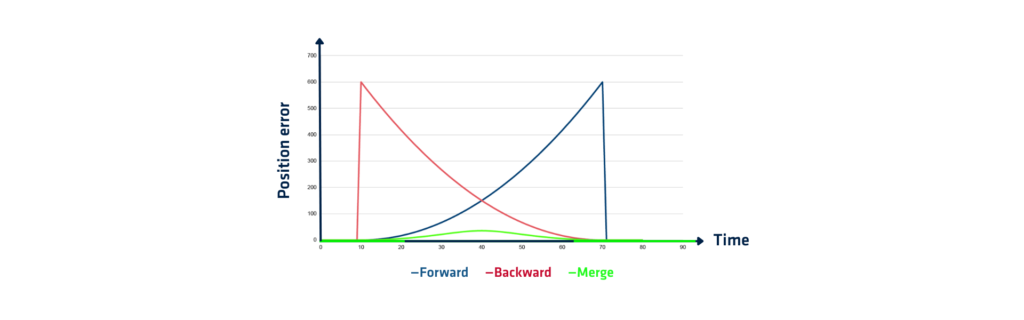
Procesamiento hacia atrás, hacia delante y combinado
Uno de los principales métodos de postprocesamiento es el procesamiento prospectivo. Se trata de analizar los datos desde el inicio de la misión hasta el final. El software utiliza las condiciones iniciales y las mediciones para estimar la posición a lo largo de la secuencia temporal. Este método es sencillo y rápido. Sin embargo, puede arrastrar errores desde el principio a lo largo de todo el conjunto de datos.
El procesamiento hacia atrás analiza los datos desde el final de la misión hasta el principio. Este método utiliza las condiciones finales para estimar las posiciones anteriores. Suele dar resultados más precisos al principio del estudio. Ayuda a corregir los errores iniciales que se produjeron en el procesamiento hacia delante. El procesamiento hacia atrás es especialmente útil cuando el sistema comienza sin una buena cobertura de satélites.
El procesamiento fusionado combina soluciones hacia delante y hacia atrás. El software procesa los datos en ambas direcciones. A continuación, fusiona las dos trayectorias en una solución optimizada. Este tipo de procesamiento ofrece los resultados más fiables y precisos. Equilibra las condiciones iniciales y finales y minimiza el error total. La mayoría de las herramientas de postprocesamiento de gama alta utilizan este método por defecto.
El postprocesamiento también incluye técnicas como el GNSS diferencial. Este método utiliza datos de una estación base cercana con coordenadas conocidas. El sistema compara los datos del rover con los de la base. Aplica correcciones para reducir los errores relacionados con el satélite. Otro método habitual es el postprocesamiento INS estrechamente acoplado. Fusiona los datos del satélite con los del sensor inercial para gestionar las interrupciones breves y mejorar la estabilidad de la posición.
Los topógrafos, ingenieros e investigadores confían en el posprocesamiento para lograr una gran precisión. Es esencial para la cartografía, la hidrografía, los vuelos de vehículos aéreos no tripulados y los estudios científicos. Las herramientas de postprocesamiento requieren una calibración cuidadosa y una sincronización temporal correcta. La calidad de los datos depende en gran medida de la precisión de los sensores y del registro adecuado de los datos durante la misión.
Software Qinertia INS PPK
El software Qinertia PPK ofrece un nivel completamente nuevo en soluciones de posicionamiento de alta precisión. Consiga una precisión sin precedentes en sus flujos de trabajo mediante el posprocesamiento de sus datos de localización sin procesar.
Descubra todas las funciones