
Sie vertrauen uns!
Diese Organisationen aus den verschiedensten Branchen teilen unsere Vision von Spitzenleistungen und Innovation.





















Unsere Trägheitssensoren unterstützen Ihre Anwendungen
Unsere Lösungen basieren auf jahrzehntelanger Erfahrung in der Entwicklung von Sensoren und Navigationsalgorithmen.
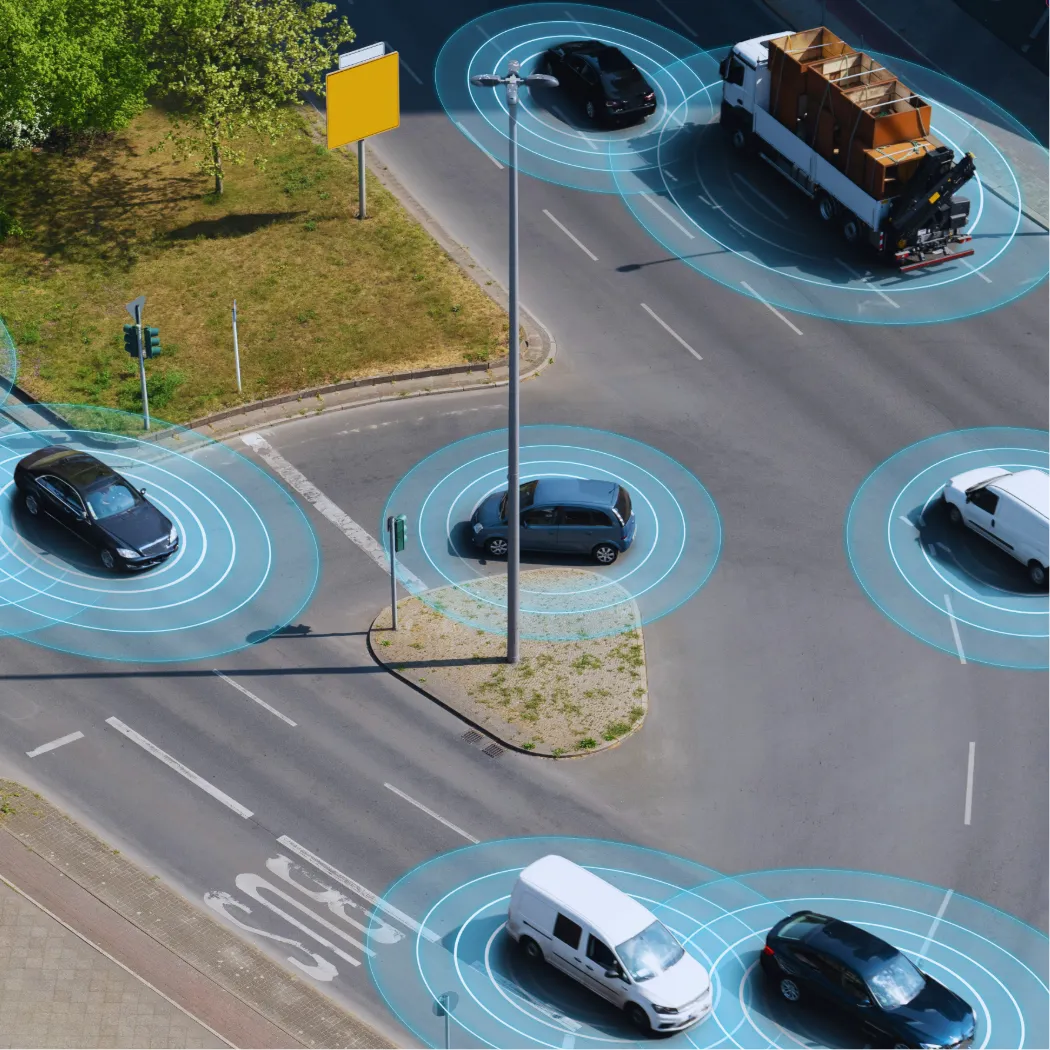
Fahrzeuge
Unsere Trägheitsnavigationssysteme sind ein Eckpfeiler moderner autonomer Fahrzeugtechnologien und ermöglichen eine präzise Navigation und Steuerung selbst in schwierigen Umgebungen wie Tunneln, Straßenschluchten oder Gebieten ohne GNSS.
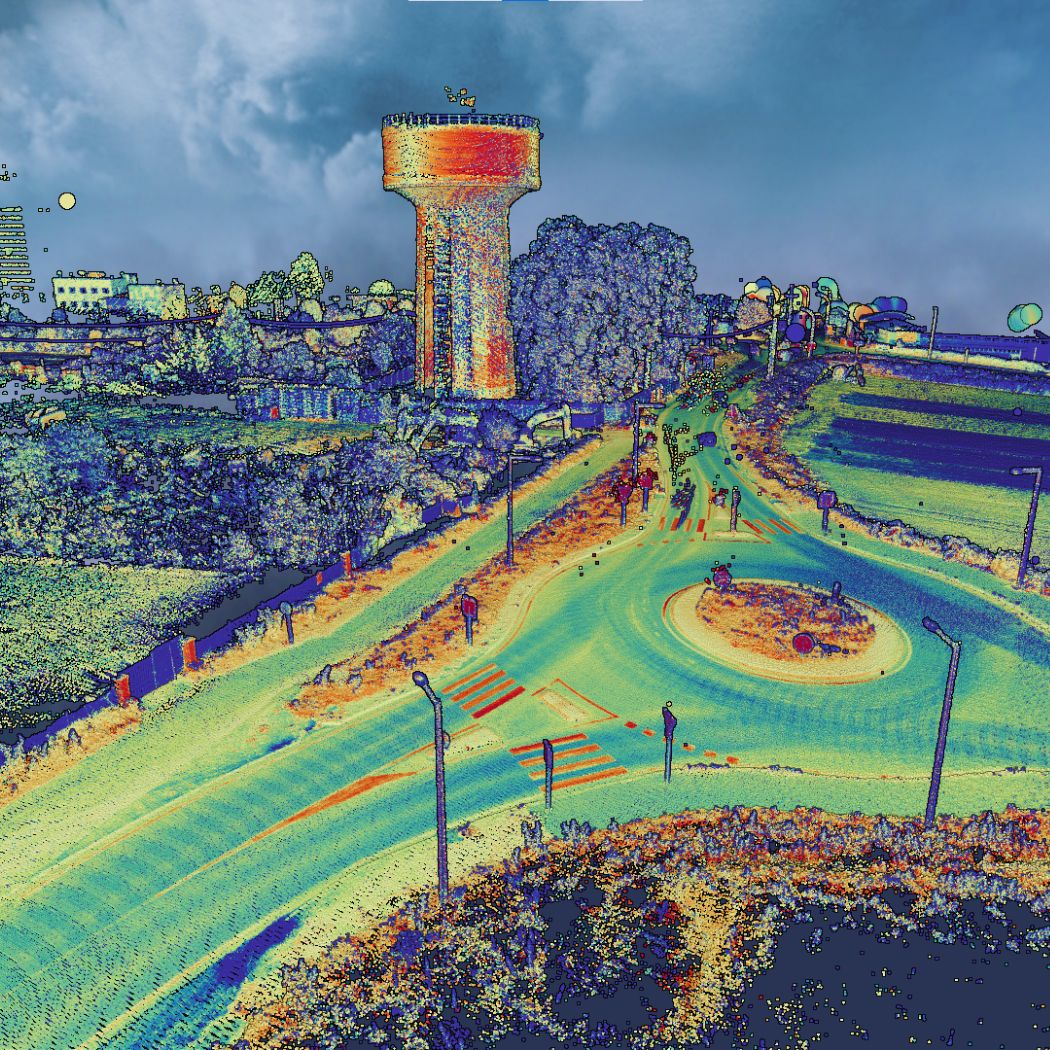
Geospatial
Unsere Trägheitsnavigationslösungen verbessern geospatiale Anwendungen, indem sie präzise und zuverlässige Daten für Kartierungs-, Vermessungs- und Positionierungsaufgaben liefern. Unsere Systeme liefern genaue Bewegungs- und Orientierungsmessungen.

Verteidigung
Unsere Trägheitssensoren sind ein entscheidender Baustein moderner Verteidigungstechnologien und bieten eine unvergleichliche Genauigkeit und Zuverlässigkeit bei der Navigation, Lenkung und Stabilisierung. Unsere Sensoren liefern präzise Bewegungs- und Orientierungsdaten auch in Umgebungen, in denen kein GNSS verfügbar ist.
Entdecken Sie unsere Fallstudien
Erfahren Sie, wie wir die Leistung der Inertialtechnologie genutzt haben, um Innovationen voranzutreiben und komplexe Herausforderungen zu lösen. Unsere Fallstudien bieten einen tiefen Einblick in reale Anwendungen und zeigen die Vielseitigkeit und den Einfluss von Inertialsystemen in verschiedenen Branchen. Entdecken Sie, wie wir gemeinsam mit unseren Kunden bahnbrechende Lösungen implementiert haben - von präziser Navigation bis hin zu modernster Bewegungsverfolgung.



Nachrichten
Werfen Sie einen Blick auf unsere neuen Produkte, Partnerschaften und Leistungen hinter den Kulissen.
Bleiben Sie auf das neueste magnetische Modell ausgerichtet
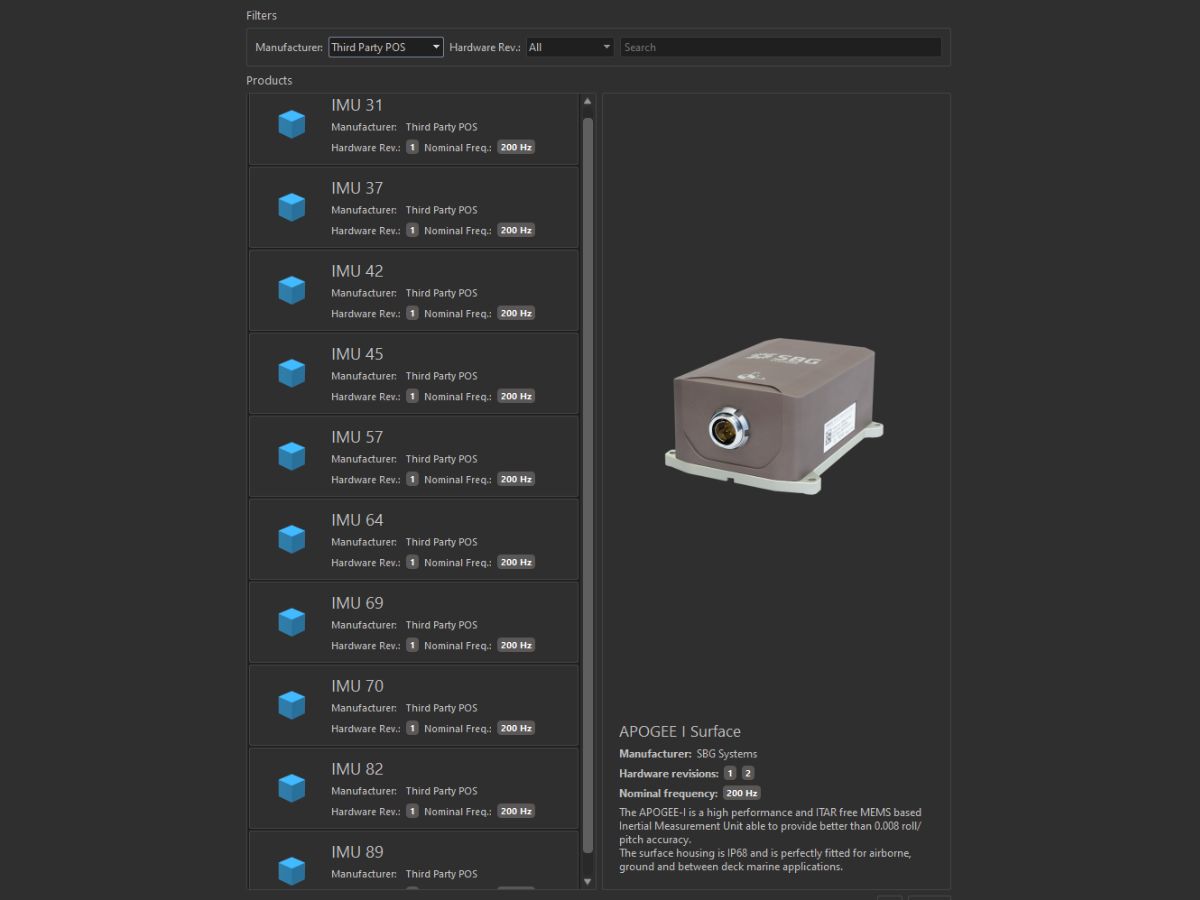
Kompatibilität mit Software von Drittanbietern und Treibern

Unser Echtzeit- und verzögerter Hebungsalgorithmus wird noch besser
Veranstaltungen, an denen wir teilnehmen
Wir würden uns freuen, Sie bei einer der kommenden Veranstaltungen kennenzulernen, an denen wir teilnehmen. Bitte lassen Sie uns wissen, ob Sie kommen, damit wir Sie so gut wie möglich willkommen heißen können.