Navigation continuity during GNSS outages
Our navigation solutions offer several advantages for Unmanned Ground Vehicles (UGVs), especially in challenging environments where other navigation technologies may fail.
Your UGVs can now operate effectively in environments where GNSS signals are unavailable, unreliable, or intentionally jammed (e.g., urban canyons, underground tunnels, or contested battlefields). This is critical for rescue and defense missions where GNSS interference can compromise your UGV navigation accuracy.
Thanks to our range of navigation solutions you get uninterrupted navigation data without relying on external references like GNSS. These allows your UGV to maintain situational awareness and autonomy even when communications or external signals are lost.

High precision in dynamic environments
Real-time data is constantly collected with our navigation systems, on the vehicle’s position, velocity, and orientation (roll, pitch, yaw), enabling precise control even in highly dynamic environments, such as rugged terrains or off-road conditions.
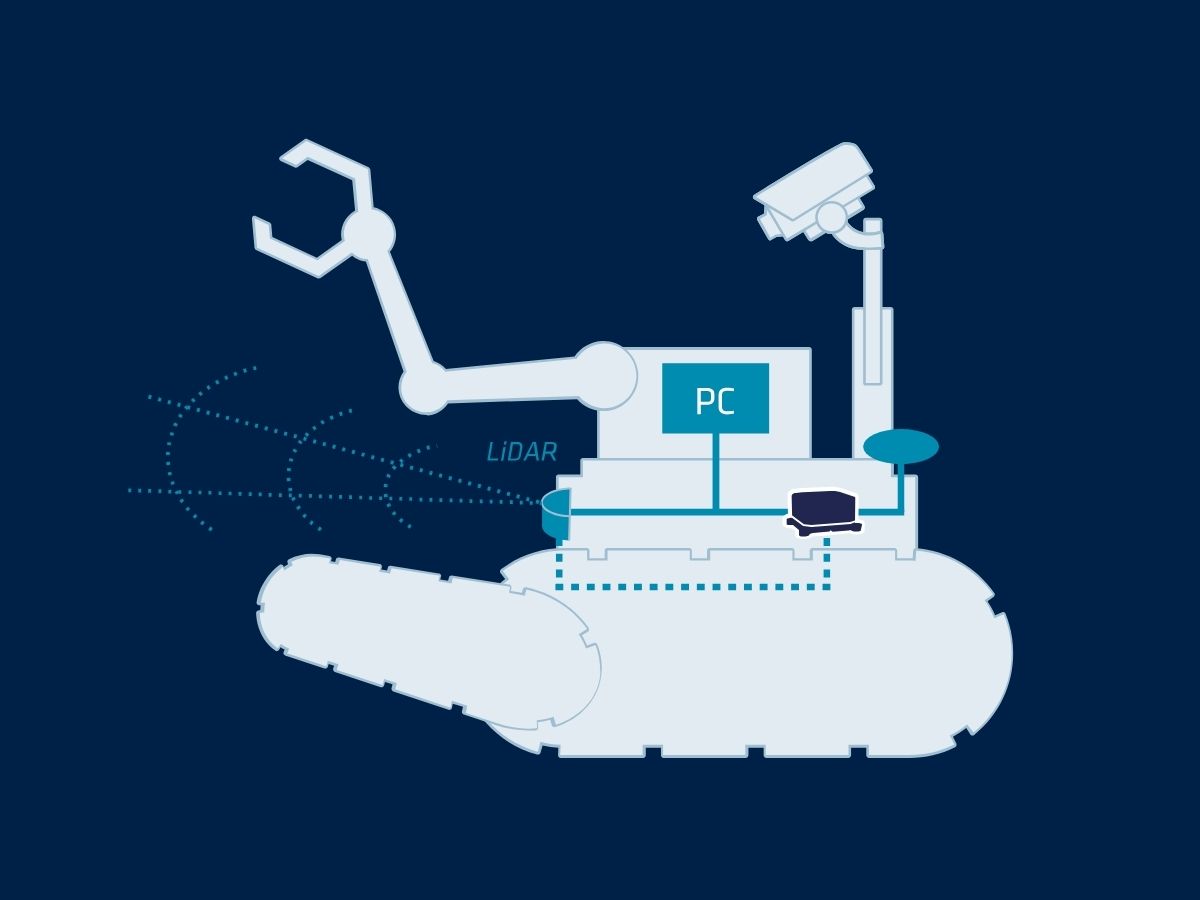
Our sensors precision ensures reliable performance in complex and fast-changing environments. To increase vehicle location data you can integrate our INS with other onboard sensors like cameras, LiDAR and odometry to form a multi-sensor navigation system. This sensor fusion improves overall localization accuracy and situational awareness.
Additionally, they offer highly reliable navigation data, reducing the chances of collision or mission failure. This is particularly crucial in military operations or hazardous environments, where safety is paramount.
Robustness in harsh conditions
An autonomous ground vehicle often operate in extreme environments (such as deserts, forests, or disaster zones) where environmental factors like dust, weather, or electromagnetic interference can affect other navigation systems.
Our solutions are highly resistant to such conditions, ensuring robust performance. By providing highly accurate orientation and positioning data, our sensors enhance a UGV’s ability to autonomously plan and follow complex paths, minimizing human intervention.
This capability improves operational efficiency in defense, logistics, and industrial applications.

Selection of products
Our solutions integrate seamlessly with UGV platforms, to deliver reliable performance in even the most challenging conditions.

Pulse-40

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Defense applications leaflet
Get our brochure delivered straight to your inbox!
Case studies
Explore the success stories behind our UGV inertial solutions. Learn about the significant impact of our advanced navigation systems on UGV operations in multiple industries.
Through each case study, we examine tangible examples that reveal how our advanced inertial sensors and GNSS technology have consistently provided unmatched accuracy, reliability, and performance in practical situations. Get detailed insights and practical examples of how our solutions tackle complex challenges and drive operational excellence.
Dive into our case studies to see how our inertial solutions can elevate your projects and achieve outstanding results.


They talk about us
Hear first hand, from the innovators and clients who have adopted our technology.
Their testimonials and success stories illustrate the significant impact our sensors have in practical UGV navigation applications.
Discover other unmanned systems applications
Explore the diverse applications of inertial systems in unmanned platforms across land, sea, and air. From autonomous ground vehicles and UAVs to underwater drones and surface vessels, our technologies ensure precise navigation, stability, and control in even the most challenging environments.
Do you have questions?
What is GNSS vs GPS?
GNSS stands for Global Navigation Satellite System and GPS for Global Positioning System. These terms are often used interchangeably, but they refer to different concepts within satellite-based navigation systems.
GNSS is a collective term for all satellite navigation systems, while GPS refers specifically to the U.S. system. It includes multiple systems that provide more comprehensive global coverage, while GPS is just one of those systems.
You get improved accuracy and reliability with GNSS, by integrating data from multiple systems, whereas GPS alone might have limitations depending on satellite availability and environmental conditions.
What are jamming and spoofing?
Jamming and spoofing are two types of interference that can significantly affect the reliability and accuracy of satellite-based navigation systems like GNSS.
Jamming refers to the intentional disruption of satellite signals by broadcasting interfering signals on the same frequencies used by GNSS systems. This interference can overwhelm or drown out the legitimate satellite signals, rendering GNSS receivers unable to process the information accurately. Jamming is commonly used in military operations to disrupt the navigation capabilities of adversaries, and it can also affect civilian systems, leading to navigation failures and operational challenges.
Spoofing, on the other hand, involves the transmission of counterfeit signals that mimic genuine GNSS signals. These deceptive signals can mislead GNSS receivers into calculating incorrect positions or times. Spoofing can be used to misdirect or misinform navigation systems, potentially causing vehicles or aircraft to veer off course or providing false location data. Unlike jamming, which merely obstructs signal reception, spoofing actively deceives the receiver by presenting false information as legitimate.
Both jamming and spoofing pose significant threats to the integrity of GNSS-dependent systems, necessitating advanced countermeasures and resilient navigation technologies to ensure reliable operation in contested or challenging environments.