
各种测量,更广泛地说,海洋学和水文地理学,都需要一个惯性传感器。这些解决方案的范围从 MRU 到高端 INS/GNSS,并且不应掉以轻心。根据应用类型及其需求选择正确的传感器至关重要。那么如何选择最佳惯性解决方案?
这就是为什么我们在汉堡港(德国)的 3 个区域(汉堡码头、桥下和城市河道)使用多波束回声测深仪进行了为期 3 天的调查,以测试我们不同的产品线。
能够证明我们的解决方案在各种环境和多个精度级别的性能是能够根据应用和条件推荐使用哪个 INS 的关键。
让我们一起发现更多关于如何选择最佳惯性解决方案的信息。
小型船舶集成和极浅水域测量
水文测量不仅包括在大型船只上进行测量,还包括 AUV、USV 甚至浮标。考虑到这些应用的大小,微型且坚固的惯性传感器可能被证明是理想的选择。SBG Systems 为您的需求开发了最具创新性的答案:如何选择最佳惯性解决方案?
SBG Systems 的微型 Ellipse 产品线 范围从 AHRS 到小型 IP68 封装中的双天线 RTK GNSS/INS。
由于坚固性在海洋应用中至关重要,因此所有 SBG Systems 的 MRU 和 INS 都受益于 -40 至 85°C 的单独高端校准程序。
我们严格筛选惯性传感器,确保只有符合规格的传感器才能为专业人员的任务提供一致的测量结果。


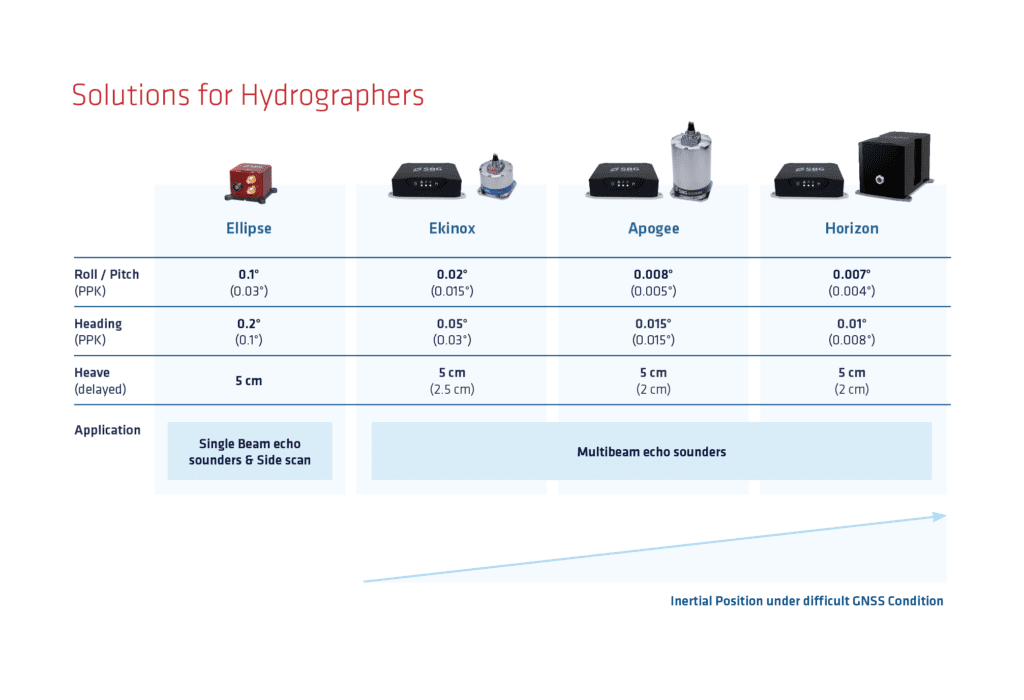
Ellipse sensors deliver a 5-cm accurate real-time heave that automatically adjusts to the wave period and provides unmatched performance in attitude (0.05°) and heading (0.2°).
In addition to buoys, small USV, and AUV solutions for navigation or surveying, these inertial sensors can also compensate and stabilize a single beam or side scan echosounder.
However, they can only offer optimal performance in open-sky surveys in very shallow waters (< 10 meters) in near-shore areas with low motion, offering a cost-effective package for these types of surveys. Indeed, the Ellipse’s RTK Heave directly provides a precise altitude, which is well-suited for near-shore surveying.
开阔天空和浅水测量
在测量过程中收集的测深和惯性数据显示,所有传感器在开阔天空和浅水测量中都能提供高精度的运动、航向精度和位置数据。
虽然不建议将 Ellipse 用于高精度 MBES 测量,但 Ekinox 或 Navsight Ekinox 是最合适的解决方案,并且可以为沿海地区的开阔天空和浅水测量提供有吸引力的实时解决方案。
Ekinox 惯性导航系统既可以作为一体式工业级传感器提供(范围从 MRU 到高端 RTK INS/GNSS),也可以作为 Marine 解决方案的一部分提供。
两者都提供相同的性能和精度:0.02° 横摇/纵倾(RTK),0.05° GNSS 航向精度和厘米级定位精度。
作为一体式紧凑型传感器,它们可以集成到空间至关重要的设备中,例如用于水文测量的 USV。

Navsight Marine 解决方案旨在简化水文测量员的任务,它以运动参考单元 (MRU) 的形式提供,提供横摇、纵倾和升沉,或者以完整的导航解决方案的形式提供,嵌入三频 GNSS 接收器或使用外部 GNSS 接收器。
Ekinox IMU 连接到处理单元。这种非常实用的设置允许 IMU 位于回声测深仪附近,而处理单元位于舱室中并连接到操作员的计算机。
适用于每种 GNSS 中断类型的惯性解决方案
GNSS 信号中断可能发生在各种环境中,包括在桥下导航或测量河流航道和港口设施时。
这对所有水文测量都是一个挑战,并突出了将惯性导航系统与 GNSS 结合使用的必要性,该系统融合了惯性和 GNSS 数据,以实现连续的更高精度轨迹。
桥下的测量结果表明,惯性传感器通过增强的 RTK、姿态、航向精度和升沉数据保持了精度。Navsight Apogee 的航向精度看起来更加稳定,因为它嵌入了更高性能的陀螺仪。
该解决方案还提供更精确的惯性和位置数据,使其成为此应用的正确选择。
SBG Systems 的 Qinertia 软件通过后处理测量数据来解决 GNSS 信号中断问题,通过先进的 PPK 技术确保准确的结果。

Apogee 和 Qinertia 的结合,即使在 GNSS 长时间中断的情况下,也能提供可靠且极其精确的解决方案。
河流航道中强烈的 GNSS 多径效应会导致频繁的小中断,这比长时间的 GNSS 中断更具挑战性。
多径效应会扰乱 GNSS 双天线航向精度和定位计算,从而增加误差,使得松耦合惯性解决方案在这种条件下变得不可靠。
与 PPK 后处理软件的互补性
这种环境需要高端 INS/GNSS 来获得稳定的横滚/纵倾数据,并需要紧耦合的后处理来过滤多径效应。
PPK计算可提高航向精度和运动性能,而紧耦合可显著提高定位精度。
Navsight Apogee解决方案具有卓越的性能(横摇/纵倾精度为0.008°,GNSS 航向精度为0.015°,厘米级定位精度),并结合Qinertia PPK软件,可在这种条件下提供最佳的解决方案。它还可以在深水区(甚至在离岸)进行高精度测量。
虽然 Ekinox 和 Apogee 运动和导航解决方案是基于 MEMS 的,但 Navsight Horizon 集成了闭环 FOG IMU,从而在最严苛的环境(如高度密集区域或低动态测量)中实现稳健且一致的性能。
我们对汉堡的测量测试系统数据进行了后处理,确保了作为参考系统的最高性能。
此外,SBG Systems 传感器与所有接受 ASCII、NMEA 和 TSS 协议的水文软件兼容。其他软件开发了与 SBG Systems 的二进制协议相符的驱动程序,从而简化了传感器的集成。
您是否找到了解决困境的答案:如何选择最佳惯性解决方案?
实时或后处理?
在这些不同的测量中,后处理已证明可以改善最恶劣条件下的测量结果。
在具有挑战性的 GNSS 环境中,与依赖实时数据来确保精度的开阔天空测量不同,后处理软件可确保最佳性能。
前向和后向计算以及先进的 PPK 算法有助于实现最高级别的精度。在多径效应方面表现稳健,紧耦合在这种条件下至关重要。
Qinertia 简化了水文工作者的后处理流程,提供了一个直观的工具,旨在简化测量员的任务并有效地简化工作流程。
这款功能齐全的仅 GNSS 和 INS/GNSS 后处理软件高效、快速且简单,可从位于 164 个国家/地区的 8,000 多个基站访问离线 RTK 校正数据。它支持第三方 IMU 和所有 GNSS 接收器,并包括 VBS(虚拟基站)功能和 PPP 计算。
这种经济高效的解决方案即使在恶劣的条件下也能进行测量,并且允许事后进行安装参数校正以挽救局面!
