El Sistema de Navegación InercialINSINS), también llamado INS, es un dispositivo de navegación que proporciona balanceo (roll), cabeceo (pitch), rumbo, posición y velocidad. Esta sofisticada tecnología determina la posición, orientación y velocidad de un objeto sin depender de referencias externas.
Esta solución de navegación autónoma es crucial en diversas aplicaciones, desde la aeroespacial y de defensa hasta la robótica y los vehículos autónomos.
¿Qué es un sistema de navegación inercialINS?
El sistema de navegación inercial (INS) es una tecnología de navegación que utiliza sensores de movimiento para calcular la posición, velocidad y orientación de un objeto a partir de su punto de partida. A diferencia de los sistemas basados en satélites, como el GPS, el INS no depende de señales externas, sino que utiliza sensores internos para seguir los cambios de movimiento a lo largo del tiempo. Esto hace que INS sea especialmente útil en entornos en los que las señales externas no están disponibles o no son fiables.
Características principales
1 - Autónomo: Funciona independientemente de las ayudas externas a la navegación, lo que lo hace adecuado para aplicaciones en zonas con escasa o nula visibilidad de los satélites.
2 - Alta precisión: Proporciona mediciones precisas de la posición y la orientación mediante la integración de datos procedentes de sensores de movimiento.
3 - Datos en tiempo real: Ofrece actualizaciones continuas de la posición y orientación de un objeto, lo que resulta crucial para entornos dinámicos y de ritmo rápido.
Tecnologías detrás INS
Los sistemas de navegación inercial se basan en varias tecnologías básicas para proporcionar datos de navegación precisos. Estas tecnologías incluyen sensores avanzados y algoritmos informáticos que trabajan juntos para seguir el movimiento de un objeto. A continuación se describen las principales tecnologías utilizadas en INS:
1- Giroscopios
Los giroscopios son componentes esenciales de un INS, utilizados para medir la velocidad angular o las tasas de rotación alrededor de diferentes ejes.
- Giroscopios láser anulares (RLG): Utilizan rayos láser para medir la rotación con gran precisión. Los RLG son conocidos por su baja deriva y estabilidad a largo plazo.
Giroscopios de fibra óptica (FOG): Utilizan la interferencia de la luz que viaja a través de fibras ópticas para medir el movimiento de rotación. Los FOG ofrecen una precisión excepcional y una inestabilidad mínima.
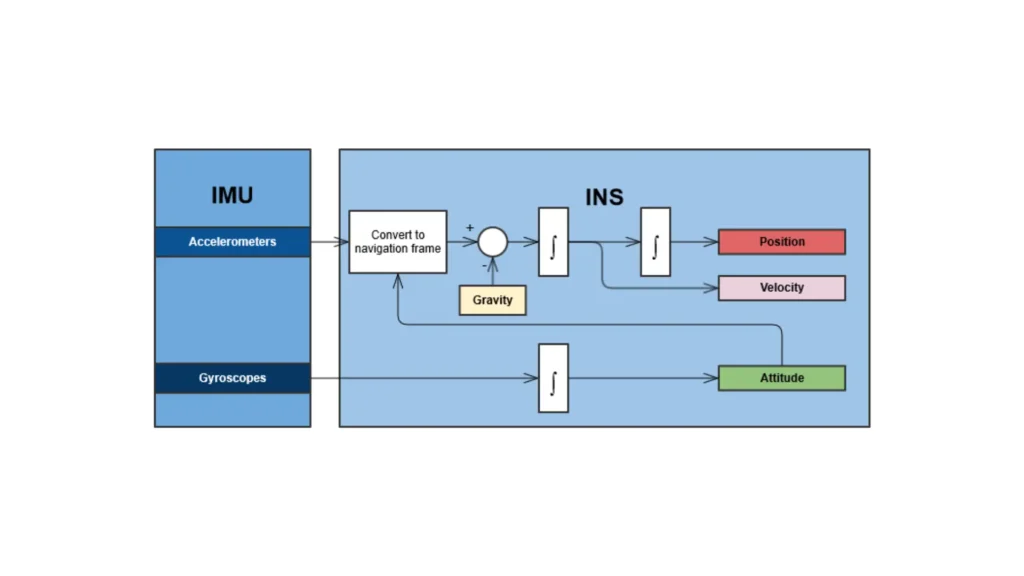
2 - Acelerómetros
Los acelerómetros miden la aceleración a lo largo de diferentes ejes y trabajan con giroscopios para determinar los cambios de velocidad y orientación.
- Los acelerómetros de sistemas electromecánicos (MEMS) son compactos y rentables, y ofrecen un rendimiento fiable para muchas aplicaciones INS.
- Ofrecen mayor precisión y estabilidad, cruciales para aplicaciones INS de gama alta en las que la precisión es fundamental.
3 - Algoritmos computacionales
Los algoritmos computacionales procesan los datos de giroscopios y acelerómetros para calcular la posición, la velocidad y la orientación.
- Algoritmos de integración: Integran los datos de aceleración a lo largo del tiempo para determinar la velocidad y la posición. Estos algoritmos tienen en cuenta las condiciones iniciales y actualizan continuamente los datos de navegación.
- Algoritmos de corrección de errores: Abordan y corrigen los sesgos y desviaciones en las mediciones de los sensores para mejorar la precisión y la fiabilidad.
Aplicaciones INS
Los sistemas de navegación inercial se utilizan en diversos sectores y aplicaciones que requieren una navegación y un posicionamiento precisos. He aquí algunos ejemplos notables:
En la industria aeroespacial, el INS proporciona datos precisos para la navegación de aeronaves, especialmente durante las fases de vuelo en las que las señales GPS pueden ser débiles o no estar disponibles. También ayuda a la navegación y el control de naves espaciales, incluido el posicionamiento por satélite y las misiones interplanetarias.
En aplicaciones militares y de defensa, el INS garantiza la precisión de la puntería y el guiado de misiles, lo que resulta crucial para una capacidad de ataque eficaz y fiable. También mejora la navegación y la eficacia operativa de los vehículos militares terrestres, incluidos los tanques y los vehículos blindados de transporte de tropas. Nuestra gama de productos cumple las normas MIL-STD-461, MIL-STD-1275 y MIL-STD-810. Además, están disponibles sin restricciones de exportación, por lo que la mayoría de las soluciones SBG Systems Systems están libres de ITAR.
En vehículos autónomosEl INS proporciona datos de navegación críticos para los coches autónomos, ayudándoles a mantener un posicionamiento y una orientación precisos incluso en entornos con disponibilidad limitada de GPS. También ayuda a los drones a conseguir un control de vuelo y una navegación precisos, garantizando un funcionamiento estable en diversas condiciones.
En robótica, INS ayuda a navegar en entornos complejos, desde la automatización industrial a las tareas de exploración, proporcionando datos precisos de posición y orientación. También permite a los robots de vigilancia mantener una posición y un control del movimiento precisos durante las tareas de supervisión e inspección.
Los sistemas de navegación inercial (INS) desempeñan un papel crucial en las tecnologías modernas de navegación y posicionamiento. Proporcionan datos precisos y fiables sin depender de referencias externas.
Utilizando tecnologías avanzadas como giroscopios, acelerómetros y algoritmos computacionales, INS INS INS actualizan continuamente la posición, la velocidad y la orientación.
INS están al servicio de diversas industrias, como la aeroespacial, la de defensa, la de vehículos autónomos y la de robótica. Su versatilidad es evidente tanto en escenarios de alto riesgo como en los cotidianos.
A medida que avance la tecnología, las capacidades y aplicaciones INS seguirán ampliándose. Este crecimiento responderá a la evolución de la demanda de navegación y posicionamiento.